一种对混凝土振捣质量实施监测的方法和系统与流程
本发明提出了一种对混凝土振捣质量实施监测的方法和系统,属于混凝土振捣质量监控。
背景技术:
1、混凝土振捣是在混凝土施工过程中常用的一种工艺,用于改善混凝土的密实性、均匀性和强度。传统的混凝土振捣方法通常依赖于经验和观察,缺乏实时的监测和反馈机制,因此无法确保振捣质量的一致性和合格性。为了解决这个问题,发明人提出了一种对混凝土振捣质量实施监测的方法。目前,一些技术已经应用于混凝土振捣的监测领域,例如振动传感器、加速度传感器和位移传感器等。这些传感器可以测量振捣设备的振动情况、混凝土表面的变化和振捣能量等参数。然而,现有技术中存在混凝土振捣质量检测过程中因为传感器不准确而导致检测误差较大的问题。
技术实现思路
1、本发明提供了一种对混凝土振捣质量实施监测的方法和系统,用以解决现有技术中混凝土振捣质量检测过程中因为传感器不准确而导致检测误差较大的问题,所采取的技术方案如下:
2、一种对混凝土振捣质量实施监测的方法,所述对混凝土振捣质量实施监测的方法包括:
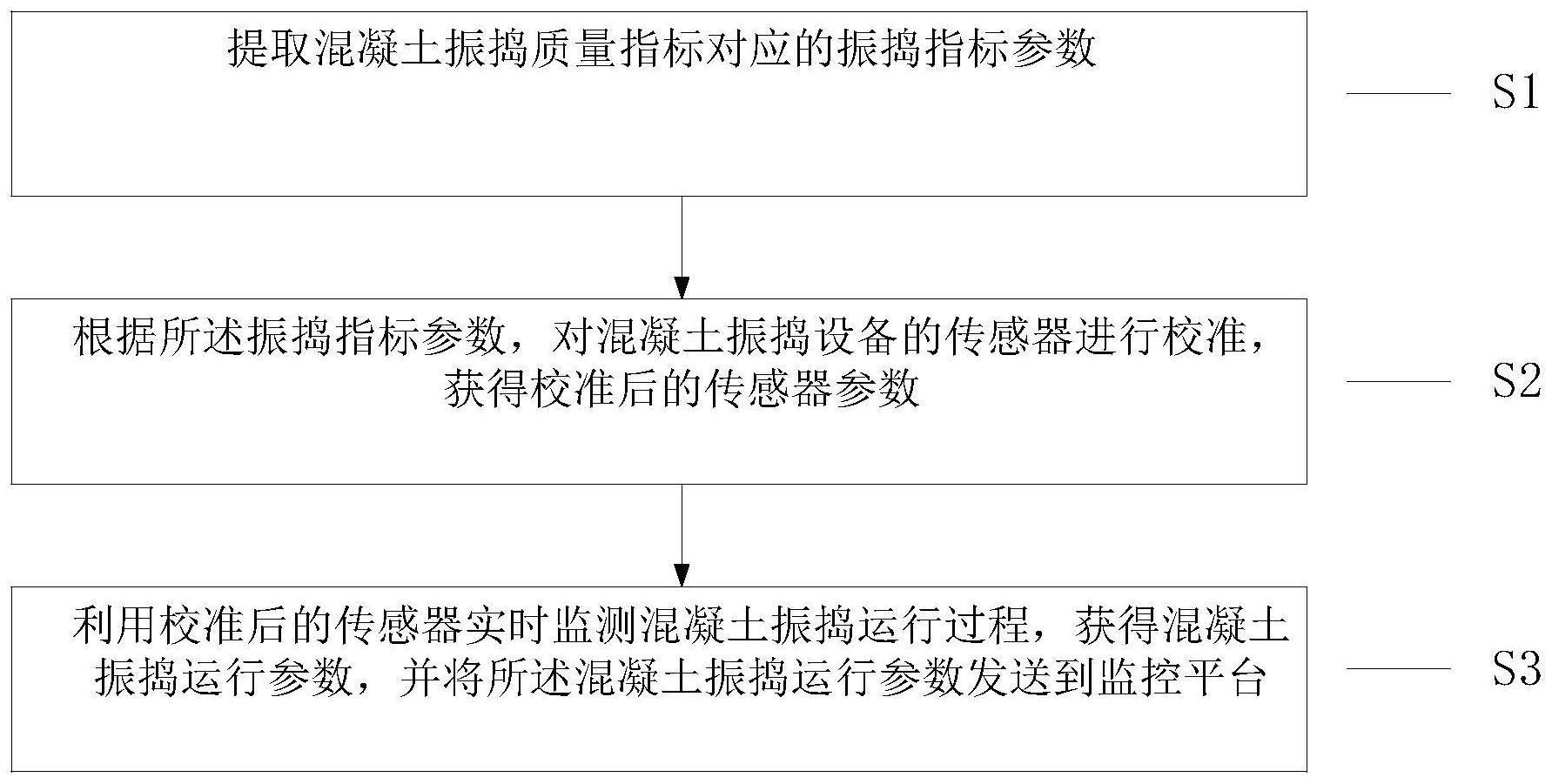
3、提取混凝土振捣质量指标对应的振捣指标参数;
4、根据所述振捣指标参数,对混凝土振捣设备的传感器进行校准,获得校准后的传感器参数;
5、利用校准后的传感器实时监测混凝土振捣运行过程,获得混凝土振捣运行参数,并将所述混凝土振捣运行参数发送到监控平台。
6、进一步地,提取混凝土振捣质量指标对应的振捣指标参数,包括:
7、提取混凝土振捣任务的数字文件信息;
8、从所述混凝土振捣任务的数据文件信息中提取,当前混凝土任务对应的混凝土振捣质量指标,并从所述混凝土振捣质量指标中提取振捣指标参数;
9、其中,所述振捣指标参数包括振捣频率,振捣加速度,振捣压力和混凝土温度。
10、进一步地,根据所述振捣指标参数,对混凝土振捣设备的传感器进行校准,获得校准后的传感器参数,包括:
11、启动混凝土振捣设备,并在预设的试运行时间长度内通过第一传感器组和第二传感器组实时采集混凝土振捣设备运行过程中的振捣指标参数;其中,所述振捣指标参数包括振捣频率,振捣加速度,振捣压力和混凝土温度;所述第一传感器组和第二传感器组均包括振动传感器、加速度传感器、压力传感器和温度传感器;
12、实时获取试运行时间长度内所述第一传感器组和第二传感器组检测到的数据参数信息;
13、将所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数进行比较获得参数差异值;
14、当所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数之间的参数差异值未超过预设的差异度阈值时,则选择采集数值与混凝土振捣设备运行目标参数数值差异值最小的一组传感器组作为混凝土振捣设备的监测传感器组;
15、当所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数之间的参数差异值超过预设的差异度阈值时,则对所述第一传感器组和第二传感器组进行传感器校准。
16、进一步地,当所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数之间的参数差异值超过预设的差异度阈值时,则对所述第一传感器组和第二传感器组进行传感器校准,包括:
17、将所述第一层传感器所采集到的参数信息与混凝土振捣设备的运行目标参数数值进行比较获得第一比较差值;
18、将所述第二层传感器所采集到的参数信息与混凝土振捣设备的运行目标参数数值进行比较获得第二比较差值;
19、利用所述第比较差值和第二比较差值获得校准偏移值;
20、提取采集数值与混凝土振捣设备运行目标参数数值差异值最小的一组传感器组作为目标传感器组,利用校准偏移值对所述目标传感器组中的一个或多个传感器进行校准,获得校准后的传感器组并将校准后的传感器组作为混凝土振捣设备的监测传感器。
21、进一步地,所述振动传感器、加速度传感器、压力传感器和温度传感器对应的校准偏移值通过如下公式获取:
22、
23、其中,fp表示振动传感器的频率偏移量;n表示试运行时长内的数据采集次数;f1i表示第一传感器组中的振动传感器的第i次数据采集中采集的振动频率数据;f2i表示第二传感器组中的振动传感器的第i次数据采集中采集的振动频率数据;f0i表示第i次数据采集中对应的目标振动频率参数;||f||i表示第i个振动矩阵对应的模,所述振动向量为[f1i,f2i,f0i];f0表示第一传感器组中的振动传感器与第二传感器组中的振动传感器的振动频率的差值每变动一个频率单位,所对应第一传感器组中的振动传感器与第二传感器组中的振动传感器的振动频率相对于所述目标振动频率之间的差值变化值所形成的矩阵向量;fe表示振动频率最大允许检测误差值;
24、
25、其中,ap表示加速度传感器的加速度偏移量;||a||i表示第i个加速度矩阵对应的模,所述加速度向量为[a1i,a2i,a0i];;a1i表示第一传感器组中的加速度传感器的第i次数据采集中采集的加速度数据;a2i表示第二传感器组中的加速度传感器的第i次数据采集中采集的加速度数据;a0i表示第i次数据采集中对应的目标加速度参数;a0表示第一传感器组中的加速度传感器与第二传感器组中的加速度传感器的振动频率的差值每变动一个加速度单位,所对应第一传感器组中的加速度传感器与第二传感器组中的加速度传感器的加速度相对于所述目标加速度之间的差值变化值所形成的矩阵向量;ae表示加速度最大允许检测误差值;
26、
27、其中,yp表示压力传感器的压力偏移量;y1i表示第一传感器组中的压力传感器的第i次数据采集中采集的压力数据;y2i表示第二传感器组中的压力传感器的第i次数据采集中采集的压力数据;y0i表示第i次数据采集中对应的目标压力参数;ye表示压力最大允许检测误差值;
28、
29、其中,tp表示温度传感器的温度偏移量;t1i表示第一传感器组中的温度传感器的第i次数据采集中采集的温度数据;t2i表示第二传感器组中的温度传感器的第i次数据采集中采集的温度数据;t0i表示第i次数据采集中对应的目标温度参数;te表示温度最大允许检测误差值。
30、一种对混凝土振捣质量实施监测的系统,所述对混凝土振捣质量实施监测的系统包括:
31、提取模块,用于提取混凝土振捣质量指标对应的振捣指标参数;
32、参数校准模块,用于根据所述振捣指标参数,对混凝土振捣设备的传感器进行校准,获得校准后的传感器参数;
33、监控模块,用于利用校准后的传感器实时监测混凝土振捣运行过程,获得混凝土振捣运行参数,并将所述混凝土振捣运行参数发送到监控平台。
34、进一步地,所述提取模块,包括:
35、信息提取模块,用于提取混凝土振捣任务的数字文件信息;
36、参数提取模块,用于从所述混凝土振捣任务的数据文件信息中提取,当前混凝土任务对应的混凝土振捣质量指标,并从所述混凝土振捣质量指标中提取振捣指标参数;
37、其中,所述振捣指标参数包括振捣频率,振捣加速度,振捣压力和混凝土温度。
38、进一步地,所述参数校准模块包括:
39、启动模块,用于启动混凝土振捣设备,并在预设的试运行时间长度内通过第一传感器组和第二传感器组实时采集混凝土振捣设备运行过程中的振捣指标参数;其中,所述振捣指标参数包括振捣频率,振捣加速度,振捣压力和混凝土温度;所述第一传感器组和第二传感器组均包括振动传感器、加速度传感器、压力传感器和温度传感器;
40、试运行模块,用于实时获取试运行时间长度内所述第一传感器组和第二传感器组检测到的数据参数信息;
41、差异值获取模块,用于将所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数进行比较获得参数差异值;
42、传感器组确定模块,用于当所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数之间的参数差异值未超过预设的差异度阈值时,则选择采集数值与混凝土振捣设备运行目标参数数值差异值最小的一组传感器组作为混凝土振捣设备的监测传感器组;
43、校准模块,用于当所述第一传感器组和第二传感器组检测到的相同时刻的相同类型的数据参数之间的参数差异值超过预设的差异度阈值时,则对所述第一传感器组和第二传感器组进行传感器校准。
44、进一步地,所述校准模块包括:
45、第一差值获取模块,用于将所述第一层传感器所采集到的参数信息与混凝土振捣设备的运行目标参数数值进行比较获得第一比较差值;
46、第二差值获取模块,用于将所述第二层传感器所采集到的参数信息与混凝土振捣设备的运行目标参数数值进行比较获得第二比较差值;
47、利偏移量获取模块,用于用所述第比较差值和第二比较差值获得校准偏移值;
48、传感器校准模块,用于提取采集数值与混凝土振捣设备运行目标参数数值差异值最小的一组传感器组作为目标传感器组,利用校准偏移值对所述目标传感器组中的一个或多个传感器进行校准,获得校准后的传感器组并将校准后的传感器组作为混凝土振捣设备的监测传感器。
49、进一步地,所述振动传感器、加速度传感器、压力传感器和温度传感器对应的校准偏移值通过如下公式获取:
50、
51、其中,fp表示振动传感器的频率偏移量;n表示试运行时长内的数据采集次数;f1i表示第一传感器组中的振动传感器的第i次数据采集中采集的振动频率数据;f2i表示第二传感器组中的振动传感器的第i次数据采集中采集的振动频率数据;f0i表示第i次数据采集中对应的目标振动频率参数;||f||i表示第i个振动矩阵对应的模,所述振动向量为[f1i,f2i,f0i];f0表示第一传感器组中的振动传感器与第二传感器组中的振动传感器的振动频率的差值每变动一个频率单位,所对应第一传感器组中的振动传感器与第二传感器组中的振动传感器的振动频率相对于所述目标振动频率之间的差值变化值所形成的矩阵向量;fe表示振动频率最大允许检测误差值;
52、
53、其中,ap表示加速度传感器的加速度偏移量;||a||i表示第i个加速度矩阵对应的模,所述加速度向量为[a1i,a2i,a0i];;a1i表示第一传感器组中的加速度传感器的第i次数据采集中采集的加速度数据;a2i表示第二传感器组中的加速度传感器的第i次数据采集中采集的加速度数据;a0i表示第i次数据采集中对应的目标加速度参数;a0表示第一传感器组中的加速度传感器与第二传感器组中的加速度传感器的振动频率的差值每变动一个加速度单位,所对应第一传感器组中的加速度传感器与第二传感器组中的加速度传感器的加速度相对于所述目标加速度之间的差值变化值所形成的矩阵向量;ae表示加速度最大允许检测误差值;
54、
55、其中,yp表示压力传感器的压力偏移量;y1i表示第一传感器组中的压力传感器的第i次数据采集中采集的压力数据;y2i表示第二传感器组中的压力传感器的第i次数据采集中采集的压力数据;y0i表示第i次数据采集中对应的目标压力参数;ye表示压力最大允许检测误差值;
56、
57、其中,tp表示温度传感器的温度偏移量;t1i表示第一传感器组中的温度传感器的第i次数据采集中采集的温度数据;t2i表示第二传感器组中的温度传感器的第i次数据采集中采集的温度数据;t0i表示第i次数据采集中对应的目标温度参数;te表示温度最大允许检测误差值。
58、本发明有益效果:
59、本发明提出的一种对混凝土振捣质量实施监测的方法和系统通过对传感器的校正能够有效提高传感器检测的基准准确性,防止传感器基准不准确,导致传感器对于混凝土振捣设备的检测误差较大的问题发生。同时,通过本发明提出的一种对混凝土振捣质量实时监测的方法和系统所提供的传感器校准方法,能够最大限度提高传感器校准准确性,并且缩短传感器校准时长,进行时长传感器校准效率。
- 还没有人留言评论。精彩留言会获得点赞!