一种基于龙芯微控制器的水深测量装置及方法
本发明属于水深测量,具体涉及一种基于龙芯微控制器的水深测量装置及方法。
背景技术:
1、水深(水位)测量是水文环境监测领域最基本的测量项目。水位测量常用的传感器有浮子式水位计、雷达/超声波水位计、压力式水位计等。浮子式水位计需要建测量水位井,建设周期长、成本高;雷达/超声波水位计安装要求测量波束垂直于水面,一般搭建倒l形测量杆使得雷达/超声波探头悬挂安装于水面上方;压力式水位计采用投入水中测量方式,不需要建立测井,对安装位置要求宽松。它原理是测量水在传感器上产生的压力p,通过压力与水深h的关系p=ρgh,计算得到水深h,从而得到水位。重力加速度g在不同地区有差异,需要根据地区进行修正。自然界中水的密度在不同环境下有差异。温度对水密度的影响一般可以通过查表法进行修正。但不同地区水的密度也会不同,通常需要进行现场测定后,对计算中的密度值进行修正,得到水深,工作繁琐。绝对压力式的水位计,测量得到的压力值包含了大气压力,水深产生的压力会受到大气压变化的影响。相对压力式(差压式)水位计有一个连通管通到水面上平衡大气压,虽然消除了大气变化影响,但是实际中连通管存在被堵塞的现象,造成传感器工作故障。以上是目前压力式水位计的不足。
技术实现思路
1、本发明的目的在于提供一种基于龙芯微控制器的水深测量装置及方法,采用水下双压力传感器和姿态传感器避免了现场测量重力加速度和水的密度,采用水下、水上压力值相减计算水深,消除大气压变化的影响。
2、为达到上述目的,本发明采用的技术方案如下:
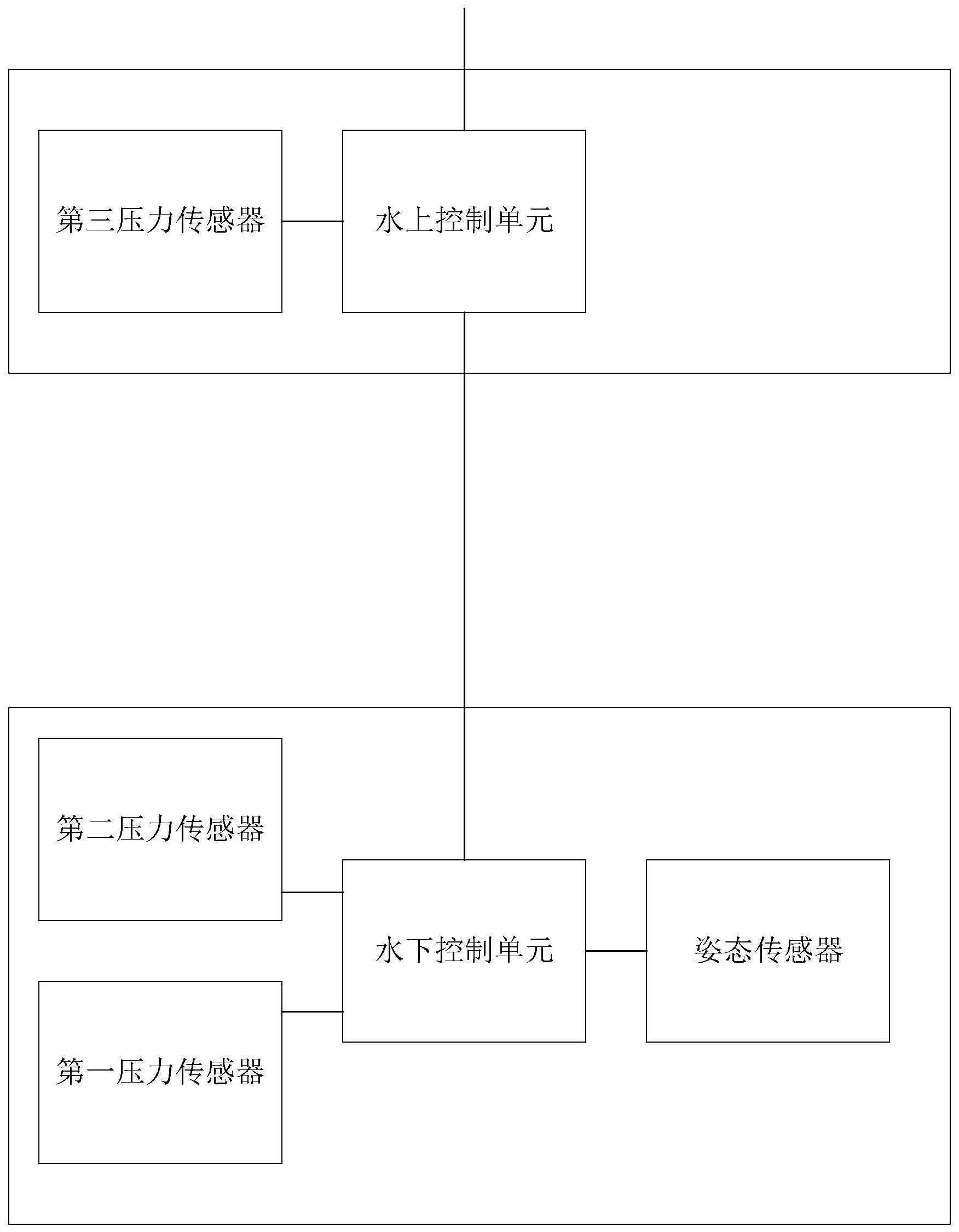
3、本发明一方面提供一种基于龙芯微控制器的水深测量装置,包括水下单元和水上单元;
4、所述水下单元包括第一压力传感器、第二压力传感器、姿态传感器和水下控制单元;所述水下单元经密封处理,安装在水下;
5、所述水上单元包括第三压力传感器和水上控制单元;
6、所述第一压力传感器和第二压力传感器用于测量水和大气总压力;
7、所述姿态传感器用于测量水下单元的姿态数据;
8、所述第一压力传感器、第二压力传感器和姿态传感器安装在同一平面,所述第一压力传感器、第二压力传感器和姿态传感器均与所述水下控制单元连接;
9、所述第三压力传感器用于测量水深测量处上方的大气压力;所述第三压力传感器与所述水上控制单元相连;
10、所述水下控制单元与所述水上控制单元相连,
11、所述水下控制单元用于读取水和大气总压力测量值及水下单元的姿态数据,并发送至水上控制单元;
12、所述水上控制单元用于读取大气压力测量值,以及根据获取的水下控制单元发送的数据计算水深。
13、进一步的,所述水下控制单元具体用于,
14、读取第一压力传感器测量的水和大气总压力数据,得到水和大气总压力p1;
15、读取第二压力传感器测量的水和大气总压力数据,得到水和大气总压力p2;
16、读取姿态传感器测量的x、y、z三个通道的模拟电压值,进行模数转换,得到3个方向的重力加速度,计算得到水下单元的姿态角θ;所述姿态角为所述第一压力传感器和第二压力传感器的连线与竖直方向的夹角。
17、进一步的,所述水上控制单元具体用于,
18、读取第三压力传感器测量的大气压力数据,得到大气压力p3;
19、读取水下控制单元中的水和大气总压力p1、水和大气总压力p2和姿态角θ;
20、根据读取的数据,按如下方式计算水深:
21、
22、其中,h为水深,d为第一压力传感器和第二压力传感器之间的安装距离。
23、进一步的,所述水下控制单元具体用于,
24、当收到所述水上单元的读取指令时,所述水下控制单元被唤醒,发送包含水和大气总压力p1、水和大气总压力p2和姿态角θ的报文至水上控制单元,并再次读取第一压力传感器、第二压力传感器和姿态传感器的测量数据;否则,所述水下控制单元处于睡眠状态。
25、进一步的,所述水上控制单元具体用于,
26、当收到用户端的读取指令时,所述水上控制单元被唤醒,发送包含水和大气总压力p1、水和大气总压力p2、大气压力p3、姿态角θ和水深h的报文至用户端,并再次读取大气压力p3以及p1、p2和θ,计算水深h;否则,所述水上控制单元处于睡眠状态。
27、进一步的,所述水上控制单元具体用于,所述水下控制单元和水上控制单元均采用龙芯微控制器。
28、进一步的,所述水上控制单元具体用于,所述龙芯微控制器选用ls1c103,三个压力传感器均采用ms5837,所述姿态传感器采用adxl335。
29、进一步的,所述水下控制单元和水上控制单元之间通过驱动器sp3485连接。
30、进一步的,所述水上控制单元具体用于,所述水下控制单元与驱动器sp3485之间和所述水下控制单元与驱动器sp3485之间,通过通用异步收发器uart连接。
31、本发明第二方面提供一种基于上述基于龙芯微控制器的水深测量装置的水深测量方法,包括:
32、所述水深测量装置上电后,通过水下控制单元读取第一压力传感器测量的压力数据,得到水和大气总压力p1;
33、通过水下控制单元读取第二压力传感器测量的压力数据,得到水和大气总压力p2;
34、通过水下控制单元读取姿态传感器计算的姿态角θ;
35、当收到水上单元的读取指令时,水下控制单元被唤醒,发送包含水和大气总压力p1、水和大气总压力p2和姿态角θ的报文至水上控制单元,并再次读取第一压力传感器、第二压力传感器和姿态传感器的测量数据;否则,水下控制单元进入低功耗睡眠状态;
36、上电后,通过水上控制单元读取第三压力传感器测量的压力数据,得到大气压力p3;读取水下控制单元中的水和大气总压力p1、水和大气总压力p2和姿态角θ;
37、根据读取的数据,按如下方式计算水深h:
38、
39、当收到用户端的读取指令时,水上控制单元被唤醒,发送包含压力p1、压力p2、压力p3、姿态角θ和水深h的报文至用户端,并再次读取大气压力p3以及压力p1、压力p2和姿态角θ数据,计算水深h;否则水上控制单元进入低功耗睡眠状态。
40、本发明的有益效果为:
41、本发明采用了水下双压力传感器和姿态传感器避免了现场测量重力加速度和水的密度,也避免了水密度变化对水深值的影响。
42、本发明采用水下、水上压力值相减计算水深,消除大气压变化的影响。
技术特征:
1.一种基于龙芯微控制器的水深测量装置,其特征在于,包括水下单元和水上单元;
2.根据权利要求1所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水下控制单元具体用于,
3.根据权利要求2所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水上控制单元具体用于,
4.根据权利要求2所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水下控制单元具体用于,
5.根据权利要求3所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水上控制单元具体用于,
6.根据权利要求1所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水上控制单元具体用于,所述水下控制单元和水上控制单元均采用龙芯微控制器。
7.根据权利要求6所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水上控制单元具体用于,所述龙芯微控制器选用ls1c103,三个压力传感器均采用ms5837,所述姿态传感器采用adxl335。
8.根据权利要求6所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水下控制单元和水上控制单元之间通过驱动器sp3485连接。
9.根据权利要求8所述的一种基于龙芯微控制器的水深测量装置,其特征在于,所述水上控制单元具体用于,所述水下控制单元与驱动器sp3485之间和所述水下控制单元与驱动器sp3485之间,通过通用异步收发器uart连接。
10.基于权利要求1至9任意一项所述的一种基于龙芯微控制器的水深测量装置的水深测量方法,其特征在于,包括:
技术总结
本发明公开了一种基于龙芯微控制器的水深测量装置及方法,该装置由水下单元和水上单元构成,其中,第一压力传感器、第二压力传感器、姿态传感器和水下控制单元构成水下单元;第三压力传感器和水上控制单元构成水上单元。水下单元的两个压力传感器测量水和大气的总压力,姿态传感器测量水下单元的姿态,水下控制单元获取压力值以及姿态数据;第三压力传感器测量大气压力,水上控制单元根据三个压力传感器压力值和姿态角,计算得到水深。本发明采用水下、水上压力值相减计算水深,采用水下双压力传感器和姿态传感器避免了现场测量重力加速度和水的密度,也避免了水密度变化对水深值的影响。
技术研发人员:张云飞,花再军,李建霓,胡鹤轩,刘颜君,余霖,余宇峰,邓劲柏
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!