激光雷达性能检测方法、装置、电子设备及存储介质与流程
本技术涉及激光雷达,尤其涉及一种激光雷达性能检测方法、装置、电子设备及存储介质。
背景技术:
1、目前,大部分的智能终端具有摄像拍照功能,以满足用户的拍照需求,比如智能手机,在摄像过程中,需要使用激光雷达校准与拍摄对象间的摄像距离,以提高摄像的清晰度。其中,手机安装的激光雷达包含激光发射器和激光接收器,激光发射器用于发射一定波长的点阵结构光,激光接收器用于接收被手机屏幕和测试板反射回来的激光,记录来回运行的时间,再计算拍摄对象到手机的距离。在目前的性能测试过程中,一般根据激光接收器采样生成的光子数量直方图的最高点作为参考时间,误差太大,影响了激光雷达性能测试的准确性。
技术实现思路
1、为了解决如何提高激光雷达性能检测精准度的技术问题,本技术提供了一种激光雷达性能检测方法、装置、电子设备及存储介质。
2、第一方面,本技术提供了一种激光雷达性能检测方法,所述方法包括:
3、控制位于测试位置的激光雷达发射激光光束并接收测试板反射的激光光束;所述测试板的测试面上每一点到所述测试位置的距离相同;
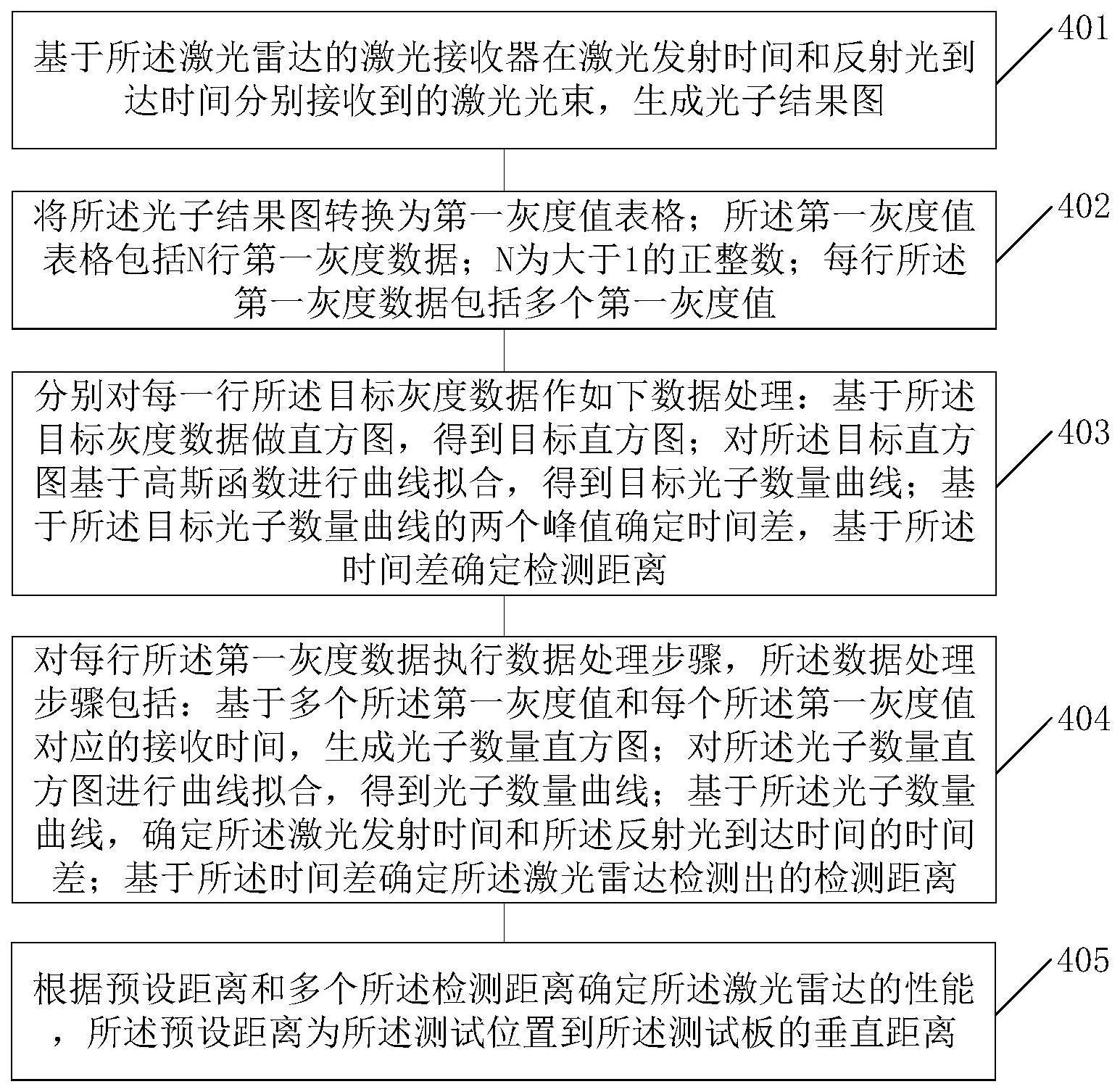
4、基于所述激光雷达的激光接收器在激光发射时间和反射光到达时间分别接收到的激光光束,生成光子结果图;
5、将所述光子结果图转换为第一灰度值表格;所述第一灰度值表格包括n行第一灰度数据;n为大于1的正整数;每行所述第一灰度数据包括多个第一灰度值;
6、对每行所述第一灰度数据执行数据处理步骤,所述数据处理步骤包括:基于多个所述第一灰度值和每个所述第一灰度值对应的接收时间,生成光子数量直方图;对所述光子数量直方图进行曲线拟合,得到光子数量曲线;基于所述光子数量曲线,确定所述激光发射时间和所述反射光到达时间的时间差;基于所述时间差确定所述激光雷达检测出的检测距离;
7、根据预设距离和多个所述检测距离确定所述激光雷达的性能,所述预设距离为所述测试位置到所述测试板的垂直距离;
8、可选地,所述测试板包括半球形标定板,所述测试面位于所述半球形标定板的内表面,所述测试位置位于所述半球形标定板的球心;
9、可选地,所述测试面中设置多个特征图案;所述特征图案的颜色灰度值与所述测试面中除所述特征图案以外的背景区域的颜色灰度值间的差异大于预设灰度差异阈值;
10、可选地,所述根据预设距离和多个所述检测距离确定所述激光雷达的性能的步骤之前,所述方法还包括:
11、获取雷达成像图片,所述雷达成像图片为基于所述激光接收器拍摄到的所述测试板的图片;
12、从所述雷达成像图片中确定采样区域对应的目标采样图片;其中,所述采样区域包括至少一部分所述背景区域和至少一部分所述特征图案;
13、基于所述目标采样图片确定所述雷达成像图片的清晰度;
14、相应地,所述根据预设距离和多个所述检测距离确定所述激光雷达的性能,包括:
15、在所述雷达成像图片的清晰度满足预设条件的情况下,根据所述预设距离和多个所述检测距离确定所述激光雷达的性能;
16、可选地,所述基于所述目标采样图片确定所述雷达成像图片的清晰度的步骤包括:
17、将所述目标采样图片转换为第二灰度值表格;所述第二灰度值表格包括m行第二灰度数据;每行所述第二灰度数据包括多个第二灰度值;m为大于1的正整数;
18、从所述多个第二灰度值中确定每行所述第二灰度数据对应的灰度值组,每个所述灰度值组包括预设数目个位置连续且灰度值差异最大的目标灰度值;
19、对所述目标灰度值进行数据扩展,得到每个所述灰度值组对应的扩展灰度值;
20、基于所述扩展灰度值和所述目标灰度值进行成像清晰度计算,得到所述雷达成像图片的清晰度;
21、可选地,所述光子数量直方图包括发射光光子数量直方图和反射光光子数量直方图,所述对所述光子数量直方图进行曲线拟合,得到光子数量曲线的步骤包括:
22、对所述发射光光子数量直方图基于高斯函数进行曲线拟合,得到发射光光子数量曲线;
23、对所述反射光光子数量直方图基于高斯函数进行曲线拟合,得到反射光光子数量曲线;
24、将所述发射光光子数量曲线和所述反射光光子数量曲线,作为所述光子数量曲线;
25、可选地,所述基于所述光子数量曲线,确定所述激光发射时间和所述反射光到达时间的时间差的步骤包括:
26、获取所述发射光光子数量曲线的光子数量峰值对应的第一时间;
27、获取所述反射光光子数量曲线的光子数量峰值对应的第二时间;
28、根据所述第二时间和所述第一时间,确定所述;激光发射时间和所述反射光到达时间的时间差
29、相应地,所述基于所述时间差确定所述激光雷达检测出的检测距离,包括:
30、根据光速以及所述时间差的一半,计算所述检测距离。
31、第二方面,本技术提供了一种成像质量检测方法,所述方法包括:
32、控制位于测试位置的激光雷达发射激光光束并接收测试板反射的激光光束;所述测试板中的测试面上包括多个特征图案和除所述特征图案以外的背景区域;
33、基于所述激光雷达的激光接收器接收所述测试板反射的激光光束,获取雷达成像图片;
34、从所述雷达成像图片中确定采样区域对应的目标采样图片;其中,所述采样区域包括至少一部分所述背景区域和至少一部分所述特征图案;
35、将所述目标采样图片转换为灰度值表格;所述灰度值表格包括r行灰度数据;每行所述灰度数据包括多个灰度值;r为大于0的正整数;
36、从所述多个灰度值中确定每行所述灰度数据对应的灰度值组,每个所述灰度值组包括预设数目个位置连续且灰度值差异最大的目标灰度值;
37、对所述目标灰度值进行数据扩展,得到每个所述灰度值组对应的扩展灰度值;
38、基于所述目标灰度值和所述扩展灰度值进行成像清晰度计算,得到所述激光接收器的成像质量;
39、可选地,所述对所述目标灰度值进行数据扩展,得到每个所述灰度值组对应的扩展灰度值的步骤包括:
40、根据所述目标灰度值,确定预设拟合曲线的曲线参数,得到每个所述灰度值组对应的目标拟合曲线;
41、在所述目标拟合曲线中,对所述目标拟合曲线对应的所述灰度值组中的任意两个相邻的所述目标灰度值间的曲线进行采样,得到所述扩展灰度值;
42、可选地,所述预设拟合曲线为三次多项式曲线,所述根据所述目标灰度值,确定预设拟合曲线的曲线参数,得到每个所述灰度值组对应的目标拟合曲线的步骤包括:
43、按照每个所述目标灰度值的位置序列,对所述目标灰度值进行编号;
44、以所述目标灰度值为y轴坐标,以所述目标灰度值对应的编号为x轴坐标,确定所述三次多项式曲线的曲线参数,得到所述目标拟合曲线;
45、可选地,所述基于所述目标灰度值和所述扩展灰度值进行成像清晰度计算,得到所述激光接收器的成像质量的步骤包括:
46、基于每个所述灰度值组中目标灰度值的位置序列,对所述目标灰度值和所述目标灰度值对应的扩展灰度值进行排序,得到每个所述灰度值组对应的灰度值序列;
47、对不同的所述灰度值序列中位于同一序列的灰度值进行均值计算,得到灰度值均值序列;
48、从所述灰度值均值序列的最后一个灰度值开始,获取每两个相邻的所述灰度值间的差值,得到灰度值差值数据;
49、对所述灰度值差值数据进行正数化和归一化,得到归一化数据;
50、对所述归一化数据进行离散型傅里叶变换,得到调制传递函数图像;
51、基于所述调制传递函数图像中的目标参考点的数值,确定所述目标采样图片的成像质量;
52、可选地,所述对所述灰度值差值数据进行正数化和归一化,得到归一化数据的步骤包括:
53、确定所述灰度值差值数据中的最小值;
54、将所述灰度值差值数据分别减去所述最小值,得到正数化数据;
55、确定所述正数化数据中的最大值;
56、将所述正数化数据分别除以所述最大值,得到所述归一化数据;
57、可选地,所述基于所述调制传递函数图像中的目标参考点的数值,确定所述目标图片的成像质量的步骤包括:
58、获取待检测的所述目标参考点;
59、获取所述目标参考点在所述调制传递函数图像中的目标数值;
60、根据所述目标数值确定所述目标图片的成像质量,其中,所述成像质量与第一差值负相关,所述第一差值为一与所述目标数值的差值;
61、可选地,所述特征图案的颜色灰度值与所述背景区域的颜色灰度值间的差异大于预设灰度差异阈值。
62、第三方面,本技术提供了一种激光雷达性能检测装置,所述装置包括:
63、发射接收模块,用于控制位于测试位置的激光雷达发射激光光束并接收测试板反射的激光光束;所述测试板的测试面上每一点到所述测试位置的距离相同;
64、光子结果图生成模块,用于基于所述激光雷达的激光接收器在激光发射时间和反射光到达时间分别接收到的激光光束,生成光子结果图;
65、第一灰度值转换模块,用于将所述光子结果图转换为第一灰度值表格;所述第一灰度值表格包括n行第一灰度数据;n为大于1的正整数;每行所述第一灰度数据包括多个第一灰度值;
66、数据处理模块,用于对每行所述第一灰度数据执行数据处理步骤,所述数据处理步骤包括:基于多个所述第一灰度值和每个所述第一灰度值对应的接收时间,生成光子数量直方图;对所述光子数量直方图进行曲线拟合,得到光子数量曲线;基于所述光子数量曲线,确定所述激光发射时间和所述反射光到达时间的时间差;基于所述时间差确定所述激光雷达检测出的检测距离;
67、性能确定模块,用于根据预设距离和多个所述检测距离确定所述激光雷达的性能,所述预设距离为所述测试位置到所述测试板的垂直距离。
68、第四方面,本技术提供了一种成像质量检测装置,所述装置包括:
69、第二发射接收模块,用于控制位于测试位置的激光雷达发射激光光束并接收测试板反射的激光光束;所述测试板中的测试面上包括多个特征图案和除所述特征图案以外的背景区域;
70、图片获取模块,用于基于所述激光雷达的激光接收器接收所述测试板反射的激光光束,获取雷达成像图片;
71、第一确定模块,用于从所述雷达成像图片中确定采样区域对应的目标采样图片;其中,所述采样区域包括至少一部分所述背景区域和至少一部分所述特征图案;
72、第二灰度值转换模块,用于将所述目标采样图片转换为灰度值表格;所述灰度值表格包括r行灰度数据;每行所述灰度数据包括多个灰度值;r为大于0的正整数;
73、第二确定模块,用于从所述多个灰度值中确定每行所述灰度数据对应的灰度值组,每个所述灰度值组包括预设数目个位置连续且灰度值差异最大的目标灰度值;
74、数据扩展模块,用于对所述目标灰度值进行数据扩展,得到每个所述灰度值组对应的扩展灰度值;
75、质量检测模块,用于基于所述目标灰度值和所述扩展灰度值进行成像清晰度计算,得到所述激光接收器的成像质量。
76、第五方面,本技术提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
77、存储器,用于存放计算机程序;
78、处理器,用于执行存储器上所存放的程序时,实现第一方面任一项实施例所述的激光雷达性能检测方法的步骤,或者,实现第二方面任一项实施例所述的成像质量检测方法的步骤。
79、第六方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项实施例所述的激光雷达性能检测方法的步骤,或者,实现如第二方面任一项实施例所述的成像质量检测方法的步骤。
80、本技术实施例提供的上述技术方案与现有技术相比具有如下优点:
81、本技术实施例提供的该激光雷达性能检测方法,包括:控制位于测试位置的激光雷达发射激光光束并接收测试板反射的激光光束;所述测试板的测试面上每一点到所述测试位置的距离相同;基于所述激光雷达的激光接收器在激光发射时间和反射光到达时间分别接收到的激光光束,生成光子结果图;将所述光子结果图转换为第一灰度值表格;所述第一灰度值表格包括n行第一灰度数据;n为大于1的正整数;每行所述第一灰度数据包括多个第一灰度值;对每行所述第一灰度数据执行数据处理步骤,所述数据处理步骤包括:基于多个所述第一灰度值和每个所述第一灰度值对应的接收时间,生成光子数量直方图;对所述光子数量直方图进行曲线拟合,得到光子数量曲线;基于所述光子数量曲线,确定所述激光发射时间和所述反射光到达时间的时间差;基于所述时间差确定所述激光雷达检测出的检测距离;根据预设距离和多个所述检测距离确定所述激光雷达的性能,所述预设距离为所述测试位置到所述测试板的垂直距离。该方法对得到的光子数量直方图进行曲线拟合,可以根据曲线的峰值准确确定激光发生时间和反射光到达时间,并基于激光发生时间和反射光到达时间的时间差确定准确的检测距离,从而可以根据预设距离和多个检测距离检测激光雷达的性能,并且由于测试板的测试面的每一点距离测试位置的距离相同,避免了环境因素带来的误差,进而提高了激光雷达性能检测的精准度。
- 还没有人留言评论。精彩留言会获得点赞!