面向玻璃幕墙的飞行机器人及自动化检测方法
本公开涉及结构工程损伤检测领域,尤其涉及一种面向玻璃幕墙的飞行机器人及自动化检测方法。
背景技术:
1、玻璃幕墙是一种集采光、遮雨、防风、保温多功能为一体的建筑外围护结构,随着城市建设的美观要求以及高层建筑的需求量增多,玻璃幕墙作为建筑技术、功能、结构和建筑艺术的综合体,已经被广泛应用于建筑结构领域,尤其是高层建筑领域。由于建筑设计的丰富多彩以及高层建筑所需求的结构特性,玻璃幕墙的形态、结构支撑形式也日趋复杂,在日常状态的风荷载与温度荷载的长期作用下,高层玻璃幕墙会随着时间的延长不可避免地出现一些缺陷,比如玻璃面板的划痕、自爆,结构胶的老化、腐蚀,支承结构的应力松弛、变形。
2、现有玻璃幕墙检测绝大多数应用蜘蛛人进行高空作业来针对每块玻璃的质量进行检测,人工检测效率低且成本高,危险系数高,现有的自动化检测手段例如光弹法,光弹法是仅针对安全玻璃自爆缺陷的检测方法,又如固有振动法仅能针对底部幕墙结构体系的缺陷检测,却不能满足高层玻璃幕墙的综合性损伤检测需求。
3、综上,现有技术公开的方案无法实现对玻璃面板、结构胶、支撑结构等的隐蔽损伤检测,得到的检测结果比较片面,导致测试区域有限、检测周期长、检测精度低。
技术实现思路
1、有鉴于此,本公开实施例提供了一种面向玻璃幕墙的飞行机器人及自动化检测方法,至少部分的解决现有技术中存在的检测精度差、精测结果片面、检测周期长的问题。
2、第一方面,本公开实施例提供了一种面向玻璃幕墙的飞行机器人,包括机器人本体以及装设于所述机器人本体的多功能检测设备;
3、所述机器人本体配置有无线传输装置、真空吸附装置以及飞行系统;
4、所述多功能检测设备包括激励源组件、时域电压信号采集传感器组件、振动数据采集传感器组件和图像数据采集传感器组件;所述激励源组件通过自动式伸缩臂装设于所述机器人本体;所述时域电压信号采集传感器组件设置于所述机器人本体的周侧;所述振动数据采集传感器组件设置于所述机器人本体的顶部;所述图像数据采集传感器组件设置于所述机器人本体的底部。
5、可选的,所述激励源组件包括带有空气减隔震单元的自动力锤;
6、所述时域电压信号采集传感器组件包括加速度传感器和麦克风传感器;
7、所述振动数据采集传感器组件包括多普勒激光和微波雷达;
8、所述图像数据采集传感器组件包括工业相机和高光谱相机。
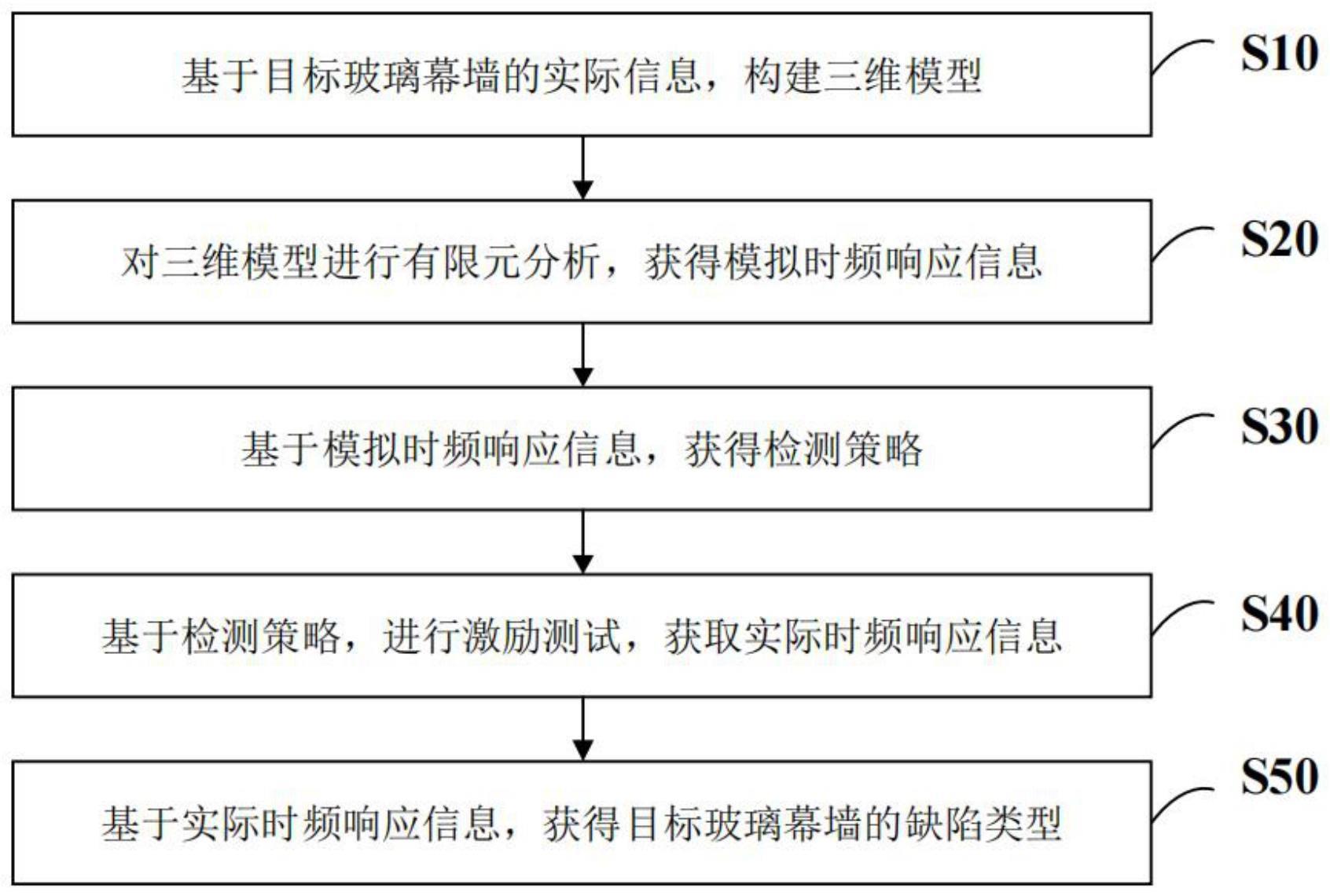
9、第二方面,本技术公开了一种面向玻璃幕墙的自动化检测方法,该方法包括:基于采集的目标玻璃幕墙的实际信息,构建三维模型;
10、对所述三维模型进行有限元分析,获得模拟时频响应信息;其中,所述模拟时频响应信息包括位移-时间时域数据、速度-时间时域数据和加速度-时间时域数据;
11、基于所述模拟时频响应信息,获得检测策略;其中,所述检测策略包括时频实测传感器选型策略、时频实测检测点设置位置和时频实测机器人走行路径,且所述时频实测检测点设置位置为可以激励起全部目标模态的测点位置;
12、基于所述检测策略,进行激励测试,获取实际时频响应信息;其中,所述实际时频响应信息包括首波到达时间、振动衰减幅值、能量谱以及能量的均方根偏差;
13、基于所述实际时频响应信息,获得目标玻璃幕墙的缺陷类型。
14、可选的,所述对所述三维模型进行有限元分析,获得模拟时频响应信息,包括:基于所述三维模型,建立有限元模型;
15、基于预设参数对所述有限元模型进行分析,获得所述模拟时频响应信息;
16、所述预设参数包括激励点位置、数据输出点位置;其中,所述数据输出点位置设置有位移检测传感器、速度检测传感器和加速度检测传感器。
17、可选的,所述基于所述检测策略,进行激励测试,获取实际时频响应信息,包括:基于所述时频实测传感器选型策略,在所述时频实测检测点设置位置布设时频实测传感器,采用高精度全自动力锤在所述时频实测检测点设置位置处进行激励,获取所述实际时频响应信息。
18、可选的,所述时频实测检测点设置位置包括立面外表面所对应的结构胶粘接区域和立面外部两块玻璃中间的耐候胶区域。
19、可选的,所述时频实测传感器选型策略包括传感器的频率测试范围覆盖目标检测频率、传感器的灵敏度与玻璃幕墙的结构特性相匹配。
20、可选的,所述基于所述实际时频响应信息,获得目标玻璃幕墙的缺陷类型,包括:对所述实际时频响应信息进行形态学分析、阈值分析、数字图像分析、高光谱分析,判断是否存在表观损伤;若是,对存在表观损伤的缺陷位置进行精细化复测,以获得所述目标玻璃幕墙的缺陷类型;
21、若否,对所述实际时频响应信息进行主频分析、幅值分析、冲击—响应分析、冲击—声振分析,判断是否存在隐蔽损伤;若是,对存在隐蔽损伤的缺陷位置进行精细化复测,以获得所述目标玻璃幕墙的缺陷类型;
22、若否,根据所述时频实测机器人走行路径,进行下一测点的自动化检测。
23、可选的,所述目标玻璃幕墙不存在自爆。
24、可选的,在三维模型构建之前还包括:基于目标玻璃幕墙的实际信息,判断所述目标玻璃幕墙是否存在预设裂纹状态;
25、若是,则判定该目标玻璃幕墙为异常区域,并重新选取不存在所述预设裂纹状态的待检测目标区域;
26、基于待检测目标区域,构建更新的三维模型;
27、其中,所述预设裂纹状态为多裂纹状态;所述异常区域包括存在自爆。
28、本公开实施例第一方面公开的面向玻璃幕墙的飞行机器人,为一种多功能一体化的飞行检测机器人,能够实现在玻璃幕墙结构上的灵活运行,可以通过激励源组件进行激励,通过图像数据采集传感器组件实现对表观损伤的捕捉,与此同时,在激振的作用下,时域电压信号采集传感器组件、振动数据采集传感器组件可对振动信号进行捕捉并做分析,总体实现冲击-声振、冲击-共振、机器视觉、高光谱和激光测振法的高效融合和协同测试,实现玻璃幕墙表观损伤和隐蔽损伤的一体化同步精准测试,可弥补现有检测手段的不足,突破高空作业技术瓶颈,提升玻璃幕墙结构损伤检测的自动化水平,显著提升测试效率和识别精度。
29、本公开实施例提供的面向玻璃幕墙的自动化检测方法,首先进行目标玻璃幕墙的实际信息采集,保证构建的模型与目标玻璃幕墙信息一致;然后在理想状态下对构建的三维模型进行时频模拟分析,获得理论数据信息,来对目标玻璃幕墙实测进行指导;最后,对实测的时频数据进行对比分析,能够精准、全面地获得目标玻璃幕墙的缺陷类型,自动化程度高,精度高、可靠性强、安全等级高。
30、本技术公开的方法,以飞行机器人为载体,进行自动化实测,实现高空和检测人员难以到达区域的玻璃幕墙损伤检测,同时能够实现对玻璃幕墙结构的无损检测。此外,该方案高效融合冲击-声振、冲击-响应、微波雷达、激光多普勒测振、机器视觉、高光谱测试方法,在检测过程中能够实现玻璃幕墙结构安全性能的高效检测与实时分析,有效提升玻璃幕墙结构损伤检测测试的精度和效率。
31、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!