自动移动的测距设备及测距方法与流程
本申请涉及测试,尤其涉及一种自动移动的测距设备及测距方法。
背景技术:
1、随着测定距离的设备的日益发展,设备的测试工作也广泛开展于大量测定距离的设备。设备的测试工作包括但不限于设备的主客观测试、解析力测试、分辨率测试、稳定性专项测试、道路测试等关于距离的标定测试。根据设备的测距模式,如主摄模式、广角模式、前摄模式等,在每个模式都需要测量一定数量的距离标定。但是,现有技术中因距离的多次变换,每一次距离标定既需要大量的人力,还需要大量的移动次数,严重影响距离测定的进程。
技术实现思路
1、本申请提供了一种自动移动的测距设备及测距方法,通过输入指令控制测距设备移动至指定位置,实现对目标距离的精确测定。
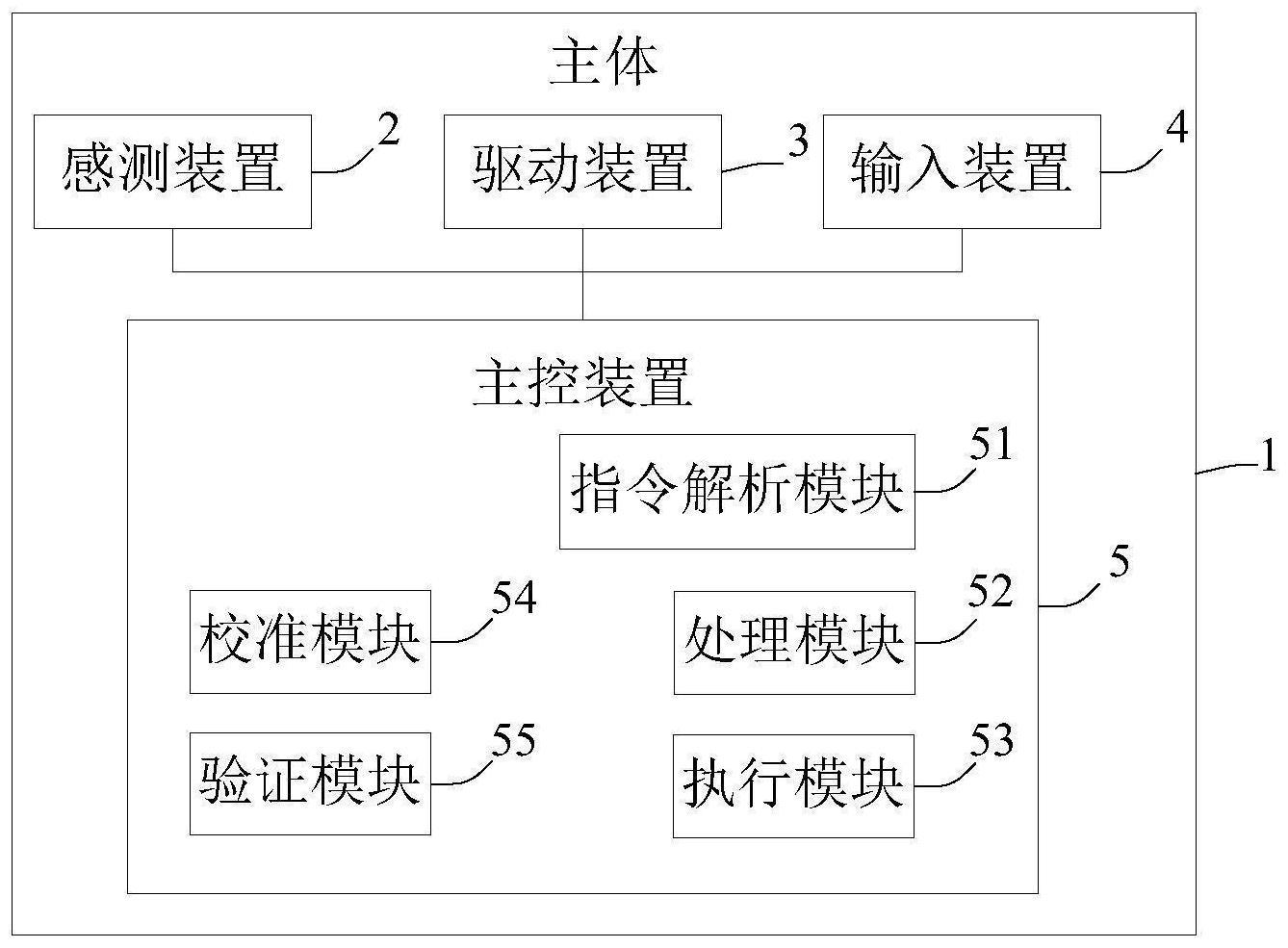
2、第一方面,本申请实施例提供一种自动移动的测距设备,所述自动移动的测距设备包括主体、感测装置、驱动装置、输入装置、以及主控装置,主体设有使所述主体移动的轮子;感测装置设置于所述主体,用于获取所述测距设备的初始位置;驱动装置设置于所述主体,用于驱动所述轮子转动而带动所述主体移动;输入装置设置于所述主体,用于接收用户输入的移动指令,所述移动指令包括控制所述测距设备移动到标定位置的指示信息;主控装置设置于所述主体,并分别与所述感测装置、所述驱动装置和所述输入装置通讯连接,所述主控装置包括指令解析模块、处理模块、以及执行模块,指令解析模块用于解析所述移动指令得到距离信息;处理模块用于根据所述距离信息和所述初始位置规划出所述主体的移动路径;执行模块用于根据所述移动路径生成执行指令并发送给所述驱动装置,其中,所述驱动装置根据所述执行指令驱动所述主体移动到所述标定位置。
3、第二方面,本申请实施例提供一种测距方法,应用于测距设备,所述测距设备包括主体、以及设置于所述主体的感测装置、驱动装置、输入装置和主控装置,所述主体设有使所述主体移动的轮子,所述主控装置分别与所述感测装置、所述驱动装置和所述输入装置通讯连接,所述主控装置包括指令解析模块、处理模块、以及执行模块;所述测距方法包括:利用所述感测装置获取所述测距设备的初始位置;利用所述输入装置输入移动指令,所述移动指令包括控制所述测距设备移动到标定位置的指示信息;利用所述指令解析模块解析所述移动指令得到距离信息,所述距离信息包括所述测距设备从所述初始位置到所述标定位置的移动角度、以及移动距离;根据所述距离信息和所述初始位置,利用所述处理模块规划出所述主体的移动路径,所述移动路径包括所述主体从所述初始位置移动到所述标定位置的待移动角度、以及待移动距离;根据所述移动路径,利用所述执行模块生成执行指令并发送给所述驱动装置;根据所述执行指令,利用所述驱动装置驱动所述主体移动到所述标定位置。
4、上述自动移动的测距设备及测距方法,通过用户输入的移动指令得到测距设备的距离信息,并结合测距设备的初始位置得到主体的移动路径,生成执行指令来控制驱动装置驱动主体移动到标定位置,减少了调整测距设备所需的人力,并在移动至标定位置的过程中调整测距设备的移动角度和移动距离,使测距设备能够对不同方位的标定位置进行测距。
技术特征:
1.一种自动移动的测距设备,其特征在于,所述自动移动的测距设备包括:
2.如权利要求1所述的自动移动的测距设备,其特征在于,所述距离信息包括所述测距设备从所述初始位置到所述标定位置的移动角度、以及移动距离。
3.如权利要求1所述的自动移动的测距设备,其特征在于,所述移动路径包括所述主体从所述初始位置移动到所述标定位置的待移动角度、以及待移动距离。
4.如权利要求1所述的自动移动的测距设备,其特征在于,所述执行指令包括所述轮子的转数、以及移动角度。
5.如权利要求2所述的自动移动的测距设备,其特征在于,所述主控装置还包括校准模块;所述校准模块在所述主体移动到所述标定位置之前,用于执行下面步骤,以使所述驱动装置调整驱动:
6.如权利要求1所述的自动移动的测距设备,其特征在于,所述主控装置还包括验证模块;所述验证模块在所述主体移动到所述标定位置之后,用于计算出所述测距设备从当前位置到所述初始位置的当前移动角度和当前移动距离并判断是否与所述距离信息一致。
7.一种测距方法,应用于测距设备,所述测距设备包括主体、以及设置于所述主体的感测装置、驱动装置、输入装置和主控装置,所述主体设有使所述主体移动的轮子,所述主控装置分别与所述感测装置、所述驱动装置和所述输入装置通讯连接,其特征在于,所述主控装置包括指令解析模块、处理模块、以及执行模块;所述测距方法包括:
8.如权利要求7所述的测距方法,其特征在于,所述距离信息包括所述测距设备从所述初始位置到所述标定位置的移动角度、以及移动距离,所述执行指令包括所述轮子的转数、以及移动角度。
9.如权利要求7所述的测距方法,其特征在于,所述主控装置还包括校准模块;在所述主体移动到所述标定位置之前,所述测距方法还包括:
10.如权利要求7所述的测距方法,其特征在于,所述主控装置还包括验证模块;
技术总结
本申请提供一种自动移动的测距设备,包括主体、感测装置、驱动装置、输入装置和主控装置,主体设有使主体移动的轮子;感测装置、驱动装置、输入装置和主控装置都设置于主体,感测装置用于获取测距设备的初始位置;驱动装置用于驱动轮子转动而带动主体移动;输入装置用于接收用户输入的移动指令;主控装置分别与感测装置、驱动装置和输入装置通讯连接,主控装置包括指令解析模块、处理模块和执行模块,指令解析模块用于解析移动指令得到距离信息;处理模块用于根据距离信息和初始位置规划出主体的移动路径;执行模块用于根据移动路径生成执行指令并发送给驱动装置,驱动装置根据执行指令驱动主体移动到标定位置。此外,本申请还提供一种测距方法。
技术研发人员:王阳,冯可
受保护的技术使用者:北京瞰瞰智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!