车辆的电控空气悬架的标定方法、装置、车辆和存储介质与流程
本发明属于车辆控制,具体涉及一种车辆的电控空气悬架的标定方法、装置、车辆和存储介质,尤其涉及一种基于数据拟合的车辆的电控空气悬架互扰动高精度标定方法、装置、车辆和存储介质。
背景技术:
1、车辆的电控空气悬架的控制系统(ecas),能够通过空气弹簧和减振器调节车身高度、悬架刚度和阻尼,以适应车辆各种运行状态。电控空气悬架的控制系统,主要包括高度传感器、压力传感器、电子控制单元(ecu)、电磁阀和减振器等。电控空气悬架的控制系统的主要功能是稳定车身,抑制车身侧倾和俯仰,并提升乘坐舒适性,兼顾车辆的运动性和舒适性。
2、相关方案中,对车辆的电控空气悬架的标定,是由ecas标定人员测量出车身每一轴(即前桥右轴、前桥左轴、后桥左轴、后桥右轴)的基线高度,再由希望车身水平后的每一轴高度与所测量数据做减法以达到每一轴需要上升或下降的高度差,最后将计算得出的高度差通过标定工具发送给ecu实现对每一轴进行高度变化的控制。但是,由于车辆的电控空气悬架的四轴存在相互扰动的现象,需要进行多次测量标定才能使悬架水平,使得对车辆的电控空气悬架的标定的耗时长且效率较低。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的目的在于,提供一种车辆的电控空气悬架的标定方法、装置、车辆和存储介质,以解决相关方案中,对车辆的电控空气悬架的标定,是先测量出车身每一轴的基线高度,再由希望车身水平后的每一轴高度与所测量数据做减法以达到每一轴需要上升或下降的高度差,最后将计算得出的高度差通过标定工具发送给ecu实现对每一轴进行高度变化的控制,但是,由于车辆的电控空气悬架的四轴存在相互扰动的现象,需要进行多次测量标定才能使悬架水平,使得对车辆的电控空气悬架的标定的耗时长且效率较低的问题,达到通过针对车辆的整车电控空气悬架的前桥右轴fr、前桥左轴fl、后桥右轴rr、后桥左轴rl,结合主动轴动作时其他三轴的对应扰动动作之间的变化关系,确定各轴的高度传感器主动变化目标值,能够快速且高效地实现对车辆的整车电控空气悬架的标定,且标定精度高的效果。
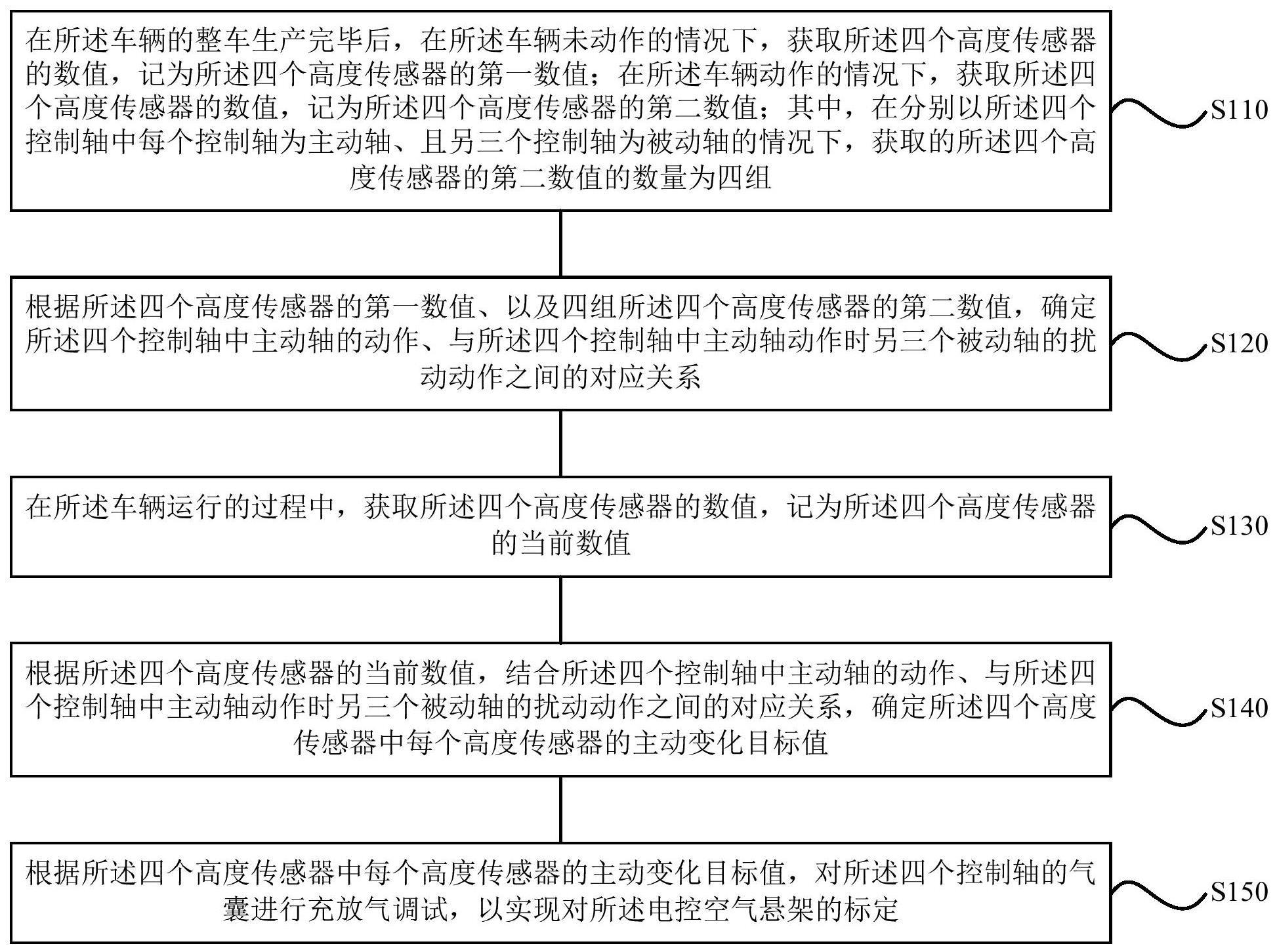
2、本发明提供一种车辆的电控空气悬架的标定方法中,所述车辆的电控空气悬架具有四个控制轴;所述电控空气悬架的四个控制轴,包括:前桥左轴、前桥右轴、后桥左轴和后桥右轴;在所述电控空气悬架的四个控制轴中,一个控制轴为主动轴时,另三个控制轴为被动轴;在所述电控空气悬架的四个控制轴处,对应地设置有四个高度传感器;所述车辆的电控空气悬架的标定方法,包括:在所述车辆的整车生产完毕后,在所述车辆未动作的情况下,获取所述四个高度传感器的数值,记为所述四个高度传感器的第一数值;在所述车辆动作的情况下,获取所述四个高度传感器的数值,记为所述四个高度传感器的第二数值;其中,在分别以所述四个控制轴中每个控制轴为主动轴、且另三个控制轴为被动轴的情况下,获取的所述四个高度传感器的第二数值的数量为四组;根据所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值,确定所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系;在所述车辆运行的过程中,获取所述四个高度传感器的数值,记为所述四个高度传感器的当前数值;根据所述四个高度传感器的当前数值,结合所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个高度传感器中每个高度传感器的主动变化目标值;根据所述四个高度传感器中每个高度传感器的主动变化目标值,对所述四个控制轴的气囊进行充放气调试,以实现对所述电控空气悬架的标定。
3、在一些实施方式中,在获取所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值时,是将所述车辆置于预设的地沟位置,且使所述车辆的车身所能达到的最低高度值与车身所能达到的最高高度值之间的差值在设定高度差范围内,利用can数据接收器,自所述车辆的ecu处采集得到所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值的。
4、在一些实施方式中,根据所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值,确定所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,包括:针对四组所述四个高度传感器的第二数值,将每组所述四个高度传感器的第二数值中每个高度传感器的数值,与所述四个高度传感器的第一数值中对应高度传感器的数值做差,得到对应高度传感器的数值差;以此,得到四组所述四个高度传感器的数值差;自四组所述四个高度传感器的数值差中,剔除超出设定位移范围的数值差,将剩余的数值差作为所述车辆的ecu控制对应高度传感器所在控制轴动作的位移,记为四组所述ecu控制对应控制轴动作的位移;基于四组所述ecu控制对应控制轴动作的位移中的每组所述ecu控制对应控制轴动作的位移,利用预设的曲线拟合工具,以每组所述ecu控制对应控制轴动作的位移中所述ecu控制主动轴动作的位移为自变量、且所述ecu控制被动轴动作的位移为应变量,做出所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线;或者,基于四组所述ecu控制对应控制轴动作的位移中的每组所述ecu控制对应控制轴动作的位移,利用预设的函数模型,以每组所述ecu控制对应控制轴动作的位移中所述ecu控制主动轴动作的位移为自变量、且所述ecu控制被动轴动作的位移为应变量,做出所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的函数关系;基于得到的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线,进行测试验证后,得到确定的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线,作为所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系;或者,基于得到的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的函数关系,进行测试验证后,得到确定的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系。
5、在一些实施方式中,根据所述四个高度传感器的当前数值,结合所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个高度传感器中每个高度传感器的主动变化目标值,包括:针对所述四个高度传感器的当前数值,确定所述四个控制轴中每个控制轴需要调节到的目标高度与所述四个高度传感器的当前数值中对应高度传感器的当前数值之间的高度差值,记为所述四个控制轴中对应控制轴的高度差值;以此,得到所述四个控制轴中每个控制轴的高度差值;根据所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个控制轴中任意轴为主动轴时另三个被动轴的被动干扰量;针对所述四个控制轴,在所述四个控制轴中每个控制轴为主动轴时,将该主动轴的高度差值、以及另三个被动轴的被动干扰量之和,确定为所述车辆的所述ecu控制该主动轴动作的位移;以此,得到所述ecu控制所述四个控制轴中每个控制轴动作的位移;针对所述四个控制轴,在所述四个控制轴中每个控制轴为主动轴时,将所述ecu控制该主动轴动作的位移、以及所述车辆的车身所能达到的最高高度值之和,确定为该主动轴处高度传感器的主动变化目标值,记为所述四个高度传感器中该高度传感器的主动变化目标值;依次,得到所述四个高度传感器中每个高度传感器的主动变化目标值。
6、在一些实施方式中,根据所述四个高度传感器中每个高度传感器的主动变化目标值,对所述四个控制轴的气囊进行充放气调试,以实现对所述电控空气悬架的标定,包括:针对所述四个高度传感器中每个高度传感器的主动变化目标值,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴中每个控制轴的气囊进行充放气调试;在所述四个控制轴中每个控制轴处高度传感器的主动变化目标值、以及该控制轴处的车身所能达到的最低高度值之间的差值绝对值小于或等于设定变化量的情况下,确定对所述电控空气悬架的标定完毕。
7、在一些实施方式中,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴的气囊进行充放气调试,包括:在所述ecu控制相应控制轴动作的位移大于或等于0、且所述车辆的车身处相应控制轴的高度大于或等于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的充放气调试。
8、在一些实施方式中,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴的气囊进行充放气调试,还包括:在所述ecu控制相应控制轴动作的位移大于或等于0、且所述车辆的车身处相应控制轴的高度小于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的充气调试,以使相应控制轴处车身升高;在所述ecu控制相应控制轴动作的位移小于0、且所述车辆的车身处相应控制轴的高度小于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的放气调试,以使相应控制轴处车身降低。
9、与上述方法相匹配,本发明另一方面提供一种车辆的电控空气悬架的标定装置中,所述车辆的电控空气悬架具有四个控制轴;所述电控空气悬架的四个控制轴,包括:前桥左轴、前桥右轴、后桥左轴和后桥右轴;在所述电控空气悬架的四个控制轴中,一个控制轴为主动轴时,另三个控制轴为被动轴;在所述电控空气悬架的四个控制轴处,对应地设置有四个高度传感器;所述车辆的电控空气悬架的标定装置,包括:获取单元,被配置为在所述车辆的整车生产完毕后,在所述车辆未动作的情况下,获取所述四个高度传感器的数值,记为所述四个高度传感器的第一数值;在所述车辆动作的情况下,获取所述四个高度传感器的数值,记为所述四个高度传感器的第二数值;其中,在分别以所述四个控制轴中每个控制轴为主动轴、且另三个控制轴为被动轴的情况下,获取的所述四个高度传感器的第二数值的数量为四组;控制单元,被配置为根据所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值,确定所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系;所述获取单元,还被配置为在所述车辆运行的过程中,获取所述四个高度传感器的数值,记为所述四个高度传感器的当前数值;所述控制单元,还被配置为根据所述四个高度传感器的当前数值,结合所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个高度传感器中每个高度传感器的主动变化目标值;所述控制单元,还被配置为根据所述四个高度传感器中每个高度传感器的主动变化目标值,对所述四个控制轴的气囊进行充放气调试,以实现对所述电控空气悬架的标定。
10、在一些实施方式中,所述获取单元,在获取所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值时,是将所述车辆置于预设的地沟位置,且使所述车辆的车身所能达到的最低高度值与车身所能达到的最高高度值之间的差值在设定高度差范围内,利用can数据接收器,自所述车辆的ecu处采集得到所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值的。
11、在一些实施方式中,所述控制单元,根据所述四个高度传感器的第一数值、以及四组所述四个高度传感器的第二数值,确定所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,包括:针对四组所述四个高度传感器的第二数值,将每组所述四个高度传感器的第二数值中每个高度传感器的数值,与所述四个高度传感器的第一数值中对应高度传感器的数值做差,得到对应高度传感器的数值差;以此,得到四组所述四个高度传感器的数值差;自四组所述四个高度传感器的数值差中,剔除超出设定位移范围的数值差,将剩余的数值差作为所述车辆的ecu控制对应高度传感器所在控制轴动作的位移,记为四组所述ecu控制对应控制轴动作的位移;基于四组所述ecu控制对应控制轴动作的位移中的每组所述ecu控制对应控制轴动作的位移,利用预设的曲线拟合工具,以每组所述ecu控制对应控制轴动作的位移中所述ecu控制主动轴动作的位移为自变量、且所述ecu控制被动轴动作的位移为应变量,做出所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线;或者,基于四组所述ecu控制对应控制轴动作的位移中的每组所述ecu控制对应控制轴动作的位移,利用预设的函数模型,以每组所述ecu控制对应控制轴动作的位移中所述ecu控制主动轴动作的位移为自变量、且所述ecu控制被动轴动作的位移为应变量,做出所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的函数关系;基于得到的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线,进行测试验证后,得到确定的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的拟合曲线,作为所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系;或者,基于得到的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的函数关系,进行测试验证后,得到确定的所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系。
12、在一些实施方式中,所述控制单元,根据所述四个高度传感器的当前数值,结合所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个高度传感器中每个高度传感器的主动变化目标值,包括:针对所述四个高度传感器的当前数值,确定所述四个控制轴中每个控制轴需要调节到的目标高度与所述四个高度传感器的当前数值中对应高度传感器的当前数值之间的高度差值,记为所述四个控制轴中对应控制轴的高度差值;以此,得到所述四个控制轴中每个控制轴的高度差值;根据所述四个控制轴中主动轴的动作、与所述四个控制轴中主动轴动作时另三个被动轴的扰动动作之间的对应关系,确定所述四个控制轴中任意轴为主动轴时另三个被动轴的被动干扰量;针对所述四个控制轴,在所述四个控制轴中每个控制轴为主动轴时,将该主动轴的高度差值、以及另三个被动轴的被动干扰量之和,确定为所述车辆的所述ecu控制该主动轴动作的位移;以此,得到所述ecu控制所述四个控制轴中每个控制轴动作的位移;针对所述四个控制轴,在所述四个控制轴中每个控制轴为主动轴时,将所述ecu控制该主动轴动作的位移、以及所述车辆的车身所能达到的最高高度值之和,确定为该主动轴处高度传感器的主动变化目标值,记为所述四个高度传感器中该高度传感器的主动变化目标值;依次,得到所述四个高度传感器中每个高度传感器的主动变化目标值。
13、在一些实施方式中,所述控制单元,根据所述四个高度传感器中每个高度传感器的主动变化目标值,对所述四个控制轴的气囊进行充放气调试,以实现对所述电控空气悬架的标定,包括:针对所述四个高度传感器中每个高度传感器的主动变化目标值,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴中每个控制轴的气囊进行充放气调试;在所述四个控制轴中每个控制轴处高度传感器的主动变化目标值、以及该控制轴处的车身所能达到的最低高度值之间的差值绝对值小于或等于设定变化量的情况下,确定对所述电控空气悬架的标定完毕。
14、在一些实施方式中,所述控制单元,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴的气囊进行充放气调试,包括:在所述ecu控制相应控制轴动作的位移大于或等于0、且所述车辆的车身处相应控制轴的高度大于或等于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的充放气调试。
15、在一些实施方式中,所述控制单元,按所述前桥右轴、所述前桥左轴、所述后桥左轴和所述后桥右轴的调试顺序,对所述四个控制轴的气囊进行充放气调试,还包括:在所述ecu控制相应控制轴动作的位移大于或等于0、且所述车辆的车身处相应控制轴的高度小于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的充气调试,以使相应控制轴处车身升高;在所述ecu控制相应控制轴动作的位移小于0、且所述车辆的车身处相应控制轴的高度小于相应控制轴处高度传感器的主动变化目标值的情况下,允许进行相应控制轴的气囊的放气调试,以使相应控制轴处车身降低。
16、与上述装置相匹配,本发明再一方面提供一种车辆,包括:以上所述的车辆的电控空气悬架的标定装置。
17、与上述方法相匹配,本发明再一方面提供一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的车辆的电控空气悬架的标定方法。
18、由此,本发明的方案,通过在车辆的整车生产完毕后,将车辆置于地沟位置,保证车身所能达到的最低高度值与车身所能达到的最高之间的差值在设定高度差范围内;在车辆运行的情况下,针对车辆的整车电控空气悬架的前桥右轴fr、前桥左轴fl、后桥右轴rr、后桥左轴rl,采集每个轴的高度传感器的数值;将前桥右轴fr、前桥左轴fl、后桥右轴rr、后桥左轴rl中的任一轴作为主动轴,并将另三轴作为被动轴,得到主动轴的高度传感器的数值、以及被动轴的高度传感器的数值,得到四组数据;针对四组数据中每组数据,将每组数据中的各轴的高度传感器的当前数值与各轴未动作时的高度传感器的数值做差,得到关于每组数据中ecu控制各轴动作的位移;将四组数据中ecu控制各轴动作的位移的数据剔除不在设定数据范围内的数据之后,针对每组数据,以每组数据中ecu控制主动轴动作的位移为自变量,以每组数据中ecu控制其他三轴动作的位移为应变量,做出关于主动轴动作时其他三轴的对应扰动动作之间的变化关系的拟合曲线并进行测试验证;在车辆实际运行的过程中,自ecu处获取各轴的高度传感器的实际数值,并结合主动轴动作时其他三轴的对应扰动动作之间的变化关系的拟合曲线,确定各轴的高度传感器主动变化目标值,以根据各轴的高度传感器主动变化目标值,对各轴的气囊进行充放气调试;从而,通过针对车辆的整车电控空气悬架的前桥右轴fr、前桥左轴fl、后桥右轴rr、后桥左轴rl,结合主动轴动作时其他三轴的对应扰动动作之间的变化关系,确定各轴的高度传感器主动变化目标值,能够快速且高效地实现对车辆的整车电控空气悬架的标定,且标定精度高。
19、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
20、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!