一种转速对振动信号幅值影响的估计方法与流程
本发明属旋转机械故障诊断,更为具体地讲,涉及一种转速对振动信号幅值影响的估计方法。
背景技术:
1、旋转机械如风力发电机的齿轮箱和工业机械臂的驱动电机等,通常工作在变转速工况下。相对于恒定转速工况,变转速工况下,转速变化会向旋转机械的振动信号引入额外的频率调制和幅值调制,且这些调制影响往往和故障引发的调制耦合在一起,从而大大增加了故障诊断的难度,极易导致误报或漏报。考虑到振动信号是最常用的故障诊断数据之一,若能准确估计转速对振动信号的影响并加以去除,对提高变转速工况下旋转机械的故障诊断的效果具有重要意义。
2、有效去除转速对振动信号影响的前提是准确估计转速的影响,如前所述,转速对振动信号的影响主要表现在两个方面,即频率调制和幅值调制;更为直观地讲,转速变化会改变振动信号的频率和幅值,转速对频率的影响一般呈线性关系,可通过阶次跟踪等成熟的方法进行抑制或去除。转速对振动幅值的影响则更为复杂,一般而言,转速增大意味着更多的能量注入到振动系统中,相应地,振动整幅会随之增大。然而,受到机器结构共振特性、振动信号在机器结构传播过程中的能量衰减以及环境噪声的影响等,振幅并不会随着转速的增大而单调增大,而是呈现强烈的非线性,且变化速率也会随着转速改变,并随机器而异,因此,实现转速对振动信号幅值影响的准确估计极具挑战性。
3、现有的转速对转动信号幅值影响的估计方法大致可分为物理建模法、包络分析法和数据驱动法等三种。物理建模法建立目标机械的动力学模型,仿真不同转速下的动力学响应(包括目标机械的振动幅值),进而获取转速与幅值的关系,实现转速对振动信号幅值影响的估计。然而该方法对机械进行了大量的简化,不能充分考虑机械结构、信号衰减和环境干扰等影响,难以实现转速对振动信号幅值影响的准确估计。包络分析法不建立转速与幅值之间的映射关系,而是直接采用振动信号特定形式的包络,如峰值包络和移动平均包络等,估计转速对振动信号幅值的影响,且常用振动信号除以包络以消除转速的影响。然而,该方法在去除转速影响的同时,也去除故障信息,因为振动的包络中不但包括转速的影响,也包括故障的影响。数据驱动法先目标机械历史数据中提取能反映整动信号幅值大小的特征,然后通过统计分析、回归分析或机器学习的方法,拟合出转速与特征之间的函数关系,从而实现转速对振动信号幅值影响的估计,该方法简单有效,可操作性强。然而,现有的数据驱动法只拟合出一个单调增长的函数,不能抓住机械结构共振引起的幅值变化,因此不能准确估计转速对振动信号幅值的影响。
技术实现思路
1、本发明目的在于克服现有技术的不足,提供一种转速对振动信号幅值影响的估计方法,能准确估计变转速工况下旋转机械振动信号幅值随转速的变化关系,进而可用于去除转速变化对振动信号的影响,从而提高变转速工况下旋转机械故障诊断的精度。
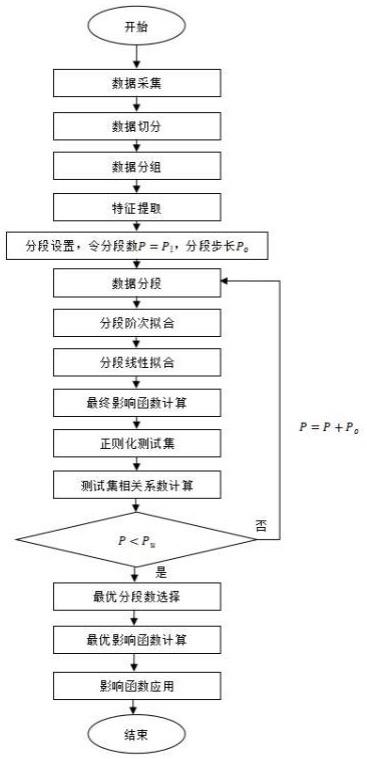
2、为实现上述发明目的,本发明提供一种转速对振动信号幅值影响的估计方法,包括以下步骤:
3、s1、数据采集:采集目标旋转机械健康状态下的振动数据和转速数据;
4、s2、数据切分:将s1采集的数据以窗长t切分为若干段,切分后的振动数据记为,转速数据记为,其中,n表示切分后的数据样本个数;
5、优选的,要求在窗长t的范围内,转速近似为恒定值;
6、s3、数据分组:将s2获得的数据随机分成两个无重复子集:一个训练集和一个测试集,其中,;
7、s4、特征提取:分别从训练集和测试集的振动信号中提取能够反映振动信号幅值大小的特征和,从转速信号中提取能够反映转速大小的特征和;
8、优选的,从振动信号中提取的特征一般为振动信号的均方根值、包络均值和频能量值等;
9、优选的,从转速信号中提取的特征一般为转速的均值;
10、s5、分段段置:设置分段数的搜索范围和搜索步长,其中,为搜索范围最小值,为搜索范围最大值,初始时,令;
11、s6、数据分段:将s4中获取的特征值依转速特征的大小均分成段,分段节点记为,包含在各段范围内的特征记为,其中,,为包括在第段的样本个数,其计算公式为(1),
12、 (1)
13、所述公式(1)用于计算各段的样本个数;
14、s7、分段阶次拟合:以转速特征为自变量,以振动特征为因变量,对s6得到的每段数据分别进行阶次拟合,拟合所得函数记为(2):
15、 (2)
16、其中,为第段的拟合参数;所述公式(2)用于计算拟合函数;
17、优选的,最优拟合参数应使和对应振动特征之间的偏差最小,所用公式为(3):
18、 (3)
19、所述公式(3)用于计算最优拟合参数;
20、其中,为损失函数,公式为(4):
21、 (4)
22、所述公式(4)用于计算损失函数的大小;
23、优选的,所述的拟合参数,其最优值的求解方法一般为数值法,常用方法包括梯度法(gradient-based methods)和最小二乘法(least mean square, lms);
24、梯度法通过循环迭代的方式逐次逼近最优参数值,所用公式为(5):
25、
26、 (5)
27、其中,为学习率常数,大小一般为0.001~1。和为分别为损失函数对,的梯度;所述公式(5)用于计算梯度大小;
28、最小二乘法通过矩阵运算求出最优拟合参数值,先令
29、;
30、对分段,上式等效于,
31、;
32、等式两侧分别取对数,得公式为(6):
33、 (6)
34、优选的,为取对数运算;所述公式(6)用于指数函数的线性化计算;
35、令, 并将上式按照分段展开,可得,
36、;
37、;
38、;
39、;
40、;
41、;
42、;
43、;
44、;
45、;
46、可写为,
47、;
48、令,,,
49、上式等效为,
50、;
51、则参数可通过矩阵运算得到,所用公式为(7):
52、 (7)
53、其中,为的转置,为的逆矩阵,所述公式(7)用于计算参数;
54、s8、分段线性拟合:为去除s7所得函数的的偏置,记,再以为自变量,以振动特征为因变量,进行分段线性拟合,拟合的函数为(8):
55、 (8)
56、其中,,为线性拟合参数;所述公式(8)用于计算线性拟合函数;
57、优选的,最优拟合参数应使和之间的误差最小,误差公式为(9):
58、 (9)
59、其中, l为损失函数;所述公式(9)用于计算拟合函数和真实值的误差的大小;
60、为确保分段处函数的连续性,施加一阶线性约束,其计算公式为(10):
61、 (10)
62、优选的,为分段节点的大小;所述公式(10)用于施加分段点处的线性约束;本步骤中,最优拟合参数的求解方法同分段指数拟合;
63、s9、最终影响函数计算:将s7拟合得到的函数代入到s8拟合得到的函数中,得到最终影响函数(11):
64、 (11)
65、其中,为最终影响函数;所述公式(11)用于计算最终影响函数;
66、s10、正则化测试集:用s9得到的影响函数归一化测试集中的振动信号,所用公式为(12):
67、 (12)
68、其中,为归一化的振动信号;所述公式(12)用于计算归一化的振动信号;
69、s11、测试集相关系数计算:采用s4的方法提取归一化测试集的转速特征和振动特征,计算两者的皮尔森相关系数,所用计算公式为(13):
70、 (13)
71、其中,和分别为正则化测试集的振动信号特征和转速信号特征的均值;所述公式(13)用于计算转速特征和振动特征的相关系数;
72、s12、若,更新,再返回s6;否则,进入步骤s13;
73、s13、最优分段数选择:采用线性搜索法,在所有的相关系数中,搜索绝对值最小时对应的分段数,即为最优分段数;
74、s14、最优影响函数获取:最优分段数时的影响函数,即为最优影响函数(14):
75、 (14)
76、其中,为最优影响函数;所述公式(14)用于计算最优影响函数;
77、s15、影响函数应用:s14获得的最优影响函数可用于正则化目标机械的历史数据和新采集的数据,正则化方法同s10,正则化的数据可用于目标机械的状态监测、故障诊断和寿命预测等。
78、本发明具有以下有益效果:
79、1、本发明一种转速对振动信号幅值影响的估计方法,先采集目标旋转机械健康状态下的振动信号和转速信号,对采集的信号进行切分和分组,从分组的数据中分别提取振动特征和转速特征;然后以转速特征为自变量,以振动特征为因变量,进行分段阶次拟合,再以分段阶次拟合的结果为自变量,以振动特征为因变量进行分段线性拟合,最优分段数通过线性搜索法获取;最后,将阶次拟合的函数代入到线性拟合函数中,得到最终的转速对振动信号幅值的影响函数;该影响函数可用于正则化目标机械的振动信号以去除转速的影响,从而提高变转速工况下旋转机械的故障诊断精度;
80、2、本发明所提方法可有效抓取转速变化诱发的结构共振对振动信号幅值的影响,并克服了分段阶次拟合存在的偏置和不连续的问题,实现了转速对振动信号幅值影响的准确估计。
- 还没有人留言评论。精彩留言会获得点赞!