基于柔性光波导的柔顺六维力传感器
本发明属于传感,特别涉及一种基于柔性光波导的柔顺六维力传感器。
背景技术:
1、六维力传感器可以实现同时感知三维空间中沿着三个坐标轴的力分量和绕坐标的三个力矩分量,基于不同检测原理和具有不同构型的六维力传感器陆续发明问世,按照其测量原理的不同,六维力传感器可分为电阻应变式、压电式、压阻式、电容式、光电式等类别。现有的六维力传感器多是高钢性的,在医疗康复器械与可穿戴设备等领域,会对人体运动的自然姿态有影响,且易于导致人体疲劳。中国专利cn114659697a提出一种基于电容传感器的柔性六维力传感器,提出基于电容的六维力传感器具有较好的柔顺特性,但浇筑成型的整体胶块受载时对维间的耦合串扰较大,需要利用复杂解耦算法,且对电磁干扰敏感。因此,急需研究一种抗干扰性强的六维力传感器。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种基于柔性光波导的柔顺六维力传感器,采用柔性光波导作为传感单元的核心,相对于发光元件与光敏元件直接对射形式有效增加了由物理变形引起的光损耗量,使得光敏元件产生的对应电压信号变化范围放大,进而提升了检测灵敏度,不封装即可避免各维的光线干扰,而且具备了较高的柔顺特性,同时克服了发光元件与光敏元件直接对射形式由变形产生的微弱信号易受杂波干扰的问题。六维力传感器整体采用分体滑移结构,可实现部分维间的机械解耦,同时可以选用不同硬度的橡胶支撑,可改变六维力传感器的整体刚度以适应不同的应用场合。此外,还具备抗过载的能力。
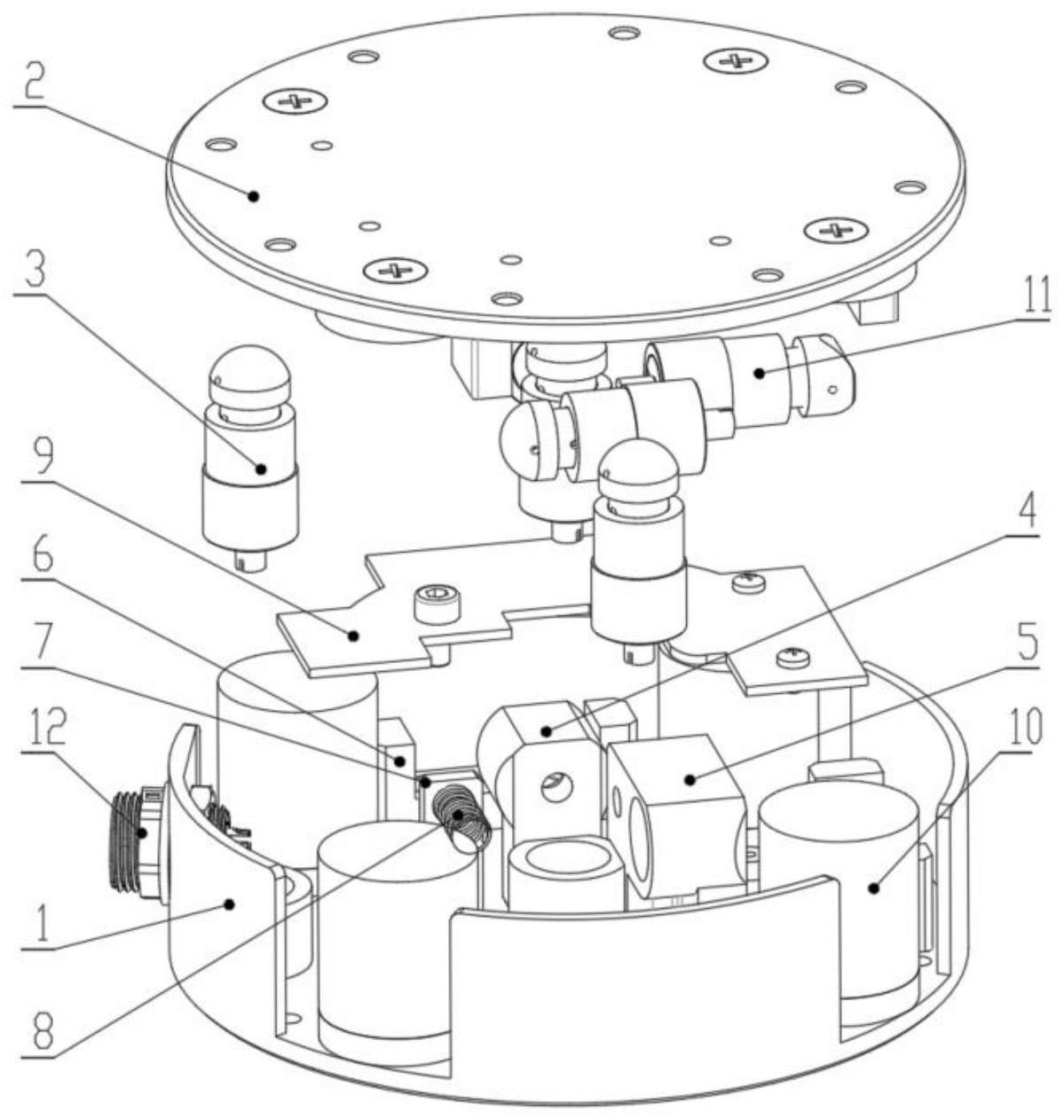
2、本发明采用的技术方案是一种基于柔性光波导的柔顺六维力传感器,其包括底座、上受力板、四个第一传感单元、单体座、双体座、限位座、平衡座、第一压缩弹簧、数据采集处理模块、橡胶支撑、两个第二传感单元和连接器,所述上受力板设于所述底座的上方,且所述底座与所述上受力板之间设有所述橡胶支撑,所述单体座、双体座、限位座以及平衡座分别设于所述底座的单体座槽、双体座槽、限位座槽以及平衡座槽上,且所述第一压缩弹簧设于所述平衡座与所述上受力板上的第一立板之间,所述数据采集处理模块设于所述底座上,所述连接器设于所述底座的连接器安装孔中,且所述连接器与所述数据采集处理模块相连通;所述四个第一传感单元均设于所述底座与所述上受力板之间,且所述四个第一传感单元中套筒的下端分别设于所述底座的中心环状凸起、第一环状凸起、第二环状凸起以及所述双体座内侧的连体环状座孔中,所述四个第一传感单元中第一滑盖的上端分别与所述上受力板的下端面以及所述上受力板中第一立板的作用面相接触,且所述第一传感单元包括套筒、滑轴、第一滑盖、锁紧块、第二压缩弹簧、柔性光波导、锁紧锥体、发光元件和光敏元件,所述锁紧锥体对称设于所述柔性光波导的上端,所述柔性光波导设于所述滑轴中,且所述锁紧锥体设于所述滑轴的锥形孔中,所述锁紧锥体的第三注胶孔与所述滑轴的第一注胶孔同轴设置,所述第一滑盖盖合于所述滑轴上,且所述第一滑盖与所述滑轴之间设有所述发光元件,所述发光元件的下端面与所述柔性光波导的上端面相贴合,所述发光元件的两根导线从所述第一滑盖两侧的第一线孔由内向外分别穿出,所述滑轴设于所述套筒中,且所述滑轴上的限位块滑动设于所述套筒的限位槽中,所述锁紧块对称设于所述柔性光波导的下端,且所述锁紧块设于所述套筒的导向孔内,所述第二压缩弹簧设于所述柔性光波导上,且位于所述滑轴与所述锁紧块之间,所述光敏元件设于所述柔性光波导的下端,且所述光敏元件的上端面与所述柔性光波导的下端面相贴合;所述两个第二传感单元均设于所述底座与所述上受力板之间,且所述两个第二传感单元中套筒的下端分别设于所述双体座外侧的连体环状座孔以及所述单体座的单体环状座孔中,且所述两个第二传感单元中第二滑盖的上端分别与所述上受力板中第二立板以及第三立板的作用面相接触,且所述第二传感单元包括套筒、滑轴、第二滑盖、锁紧块、第二压缩弹簧、柔性光波导、锁紧锥体、发光元件和光敏元件,所述锁紧锥体对称设于所述柔性光波导的上端,所述柔性光波导设于所述滑轴中,且所述锁紧锥体设于所述滑轴的锥形孔中,所述锁紧锥体的第三注胶孔与所述滑轴的第一注胶孔同轴设置,所述第二滑盖盖合于所述滑轴上,且所述第二滑盖与所述滑轴之间设有所述发光元件,所述发光元件的下端面与所述柔性光波导的上端面相贴合,所述发光元件的两根导线从所述第二滑盖两侧的第二线孔由内向外分别穿出,所述滑轴设于所述套筒中,且所述滑轴上的限位块滑动设于所述套筒的限位槽中,所述锁紧块对称设于所述柔性光波导的下端,且所述锁紧块设于所述套筒的导向孔内,所述第二压缩弹簧设于所述柔性光波导上,且位于所述滑轴与所述锁紧块之间,所述光敏元件设于所述柔性光波导的下端,且所述光敏元件的上端面与所述柔性光波导的下端面相贴合。
3、进一步地,所述底座呈圆形板结构,且所述底座的上端面均布设有四个下圆柱凸台,所述底座的中心处设有中心环状凸起,且所述底座中心处呈90°正交方位靠近边缘位置处分别设有第一环状凸起以及第二环状凸起,所述中心环状凸起、第一环状凸起以及第二环状凸起的内侧均设有内螺纹,且所述中心环状凸起、第一环状凸起以及第二环状凸起的中心处均设有凸起通孔,所述第一环状凸起以及第二环状凸起的中心连线上设置有过线孔,且所述底座的下端面设有连通所述过线孔以及凸起通孔的凹槽,所述底座的圆周方向上对称置有外径等于所述底座外径的曲面薄壁凸缘,且所述底座上侧薄壁凸缘的一端设有连接器安装孔,所述中心环状凸起的斜上方设有平衡座槽,且所述中心环状凸起右侧靠近所述底座右侧薄壁凸缘处设有限位座槽,所述中心环状凸起的右侧紧靠所述中心环状凸起处设有单体座槽,且所述中心环状凸起的下方对称设有两个垫块,所述中心环状凸起的下方紧靠所述中心环状凸起处设有类菱形的双体座槽。
4、进一步地,所述上受力板呈圆形结构,所述上受力板的下端面均布设有四个上圆柱凸台,且所述上圆柱凸台的外径与所述上受力板的外径相切,所述上受力板的右侧以及下侧距离所述上受力板中心处距离相等的位置分别设有第二立板和第三立板,所述第二立板和第三立板朝向所述上受力板中心的内侧面为作用面,且所述作用面与所述上受力板的下端面垂直,所述上受力板的左侧设有第一立板,且所述第一立板的作用面朝向右侧,所述第一立板的侧面设有立板圆柱凸台。
5、进一步地,所述套筒为圆环状结构,且所述套筒的上端为上部圆环,所述套筒的下端为下部圆环,所述下部圆环外侧设有外螺纹,且所述套筒的中间部设有导向孔,所述导向孔的一侧设有贯穿所述套筒的限位槽,且所述下部圆环的下端设有直径大于所述导向孔孔径的圆形凹槽;所述滑轴为圆柱状结构,且所述滑轴由下部滑轴和上部滑轴组成,所述下部滑轴的下端面上设有环形凹槽,所述上部滑轴中间部设有元件孔,且所述元件孔的下方同轴设置有锥形孔,所述锥形孔的下方同轴设置有波导孔,且所述锥形孔上端的孔径等于所述元件孔的孔径,所述锥形孔下端的孔径等于所述波导孔的孔径,且所述锥形孔的中部位置设有第一注胶孔,且所述下部滑轴下端的一侧设置有限位块;所述第一滑盖由第一圆环体和圆顶组成,且所述第一圆环体的内侧面设置有内螺纹,所述第一圆环体内侧设有与所述第一圆环体同轴的第一圆孔,且所述圆顶的侧面与所述第一圆环体接触处径向设置有第一线孔;所述锁紧块为t型半圆柱体结构,且所述锁紧块主体的下端面设有锁紧块圆环体,所述锁紧块主体的上端面设有半环形凹槽,所述锁紧块主体的中间部设置有第一锁紧半孔,且所述第一锁紧半孔的中间部沿径向设有第二注胶孔;所述锁紧锥体为半锥形结构,且所述锁紧锥体主体的中间部设有第二锁紧半孔,所述第二锁紧半孔的中间部沿径向设有第三注胶孔。
6、优选地,所述第二滑盖由第二圆环体、第一圆顶以及第二圆顶组成,所述第一圆顶和第二圆顶半径不同呈正交方向布置,且在最高点处相切,所述第二圆环体的内侧面设置有内螺纹,所述第二圆环体内侧设有与所述第二圆环体同轴的第二圆孔,且所述第二圆顶的侧面与所述第二圆顶接触处径向设置有第二线孔,所述第二线孔的轴线方向与所述第二圆顶的方向相同。
7、优选地,所述单体座由下部的单体支柱和上部的单体环状座组成,所述单体环状座的右端面与所述单体支柱的右端面共面,且所述单体环状座的左端面设有单体环状座孔,所述单体环状座孔的中间处设有单体环状座通孔,且所述单体环状座通孔的深度等于所述光敏元件的高度。
8、优选地,所述双体座由下部的连体支柱和上部的连体环状座组成,所述连体支柱为两个矩形柱体错位布置,且两者之间通过筋板连接,所述连体支柱左右两端端面的宽度等于所述连体环状座的厚度,且所述连体环状座的两端反向设置有连体环状座孔,所述连体环状座孔的中间处设有连体环状座通孔,且所述连体环状座通孔的深度等于所述光敏元件的高度。
9、优选地,所述限位座呈u型结构,且在所述u型体底部靠近所述u型体两端处对称布置两个台阶通孔。
10、优选地,所述平衡座的平衡座主体为l型结构,所述平衡座主体侧面立面的上端设有平衡座凸台,且沿所述平衡座凸台的径向方向设有细通孔,所述平衡座主体的底部设有直槽孔。
11、本发明的特点和有益效果是:
12、1、本发明提供的基于柔性光波导的柔顺六维力传感器,采用柔性光波导作为传感单元的核心,相对于发光元件与光敏元件直接对射形式提升了灵敏度,不封装即可避免各维的光线干扰,同时具备了较高的柔顺特性,六维力传感器整体采用分体滑移结构,可实现部分维间的机械解耦。
13、2、本发明提供的基于柔性光波导的柔顺六维力传感器,底座和受力板之间采用橡胶支撑连接,可根据不同体格的测试者选用配置相应硬度橡胶支撑的六维力传感器,以适应不同的应用场合。本发明具有大变形的能力,具有较好的顺应性,不会对使用者的自然步态产生影响,同时因长时间穿戴而造成疲劳。
14、3、本发明提供的基于柔性光波导的柔顺六维力传感器,相对于弹性体为一体式的六维力传感器,需要用算法实时处理的耦合数据得到了大大的简化,采用相同算法下可有效提高数据处理、输出的时效性。
15、4、本发明提供的基于柔性光波导的柔顺六维力传感器,可以应用于多种领域,比如智能鞋等,在鞋底的鞋掌和鞋跟处各布置一个本发明的柔顺六维力传感器,用于检测人体运动的步态和地面反作用力信息。
- 还没有人留言评论。精彩留言会获得点赞!