倾斜距离模糊条件下的低可观测助推-滑翔式轨迹目标检测跟踪方法
本发明属于临近空间高超声速目标检测跟踪领域,尤其涉及倾斜距离模糊条件下的低可观测助推-滑翔式轨迹目标检测跟踪方法。
背景技术:
1、目前的临近空间是指海拔20km-100km的空域。临近空间高超声速飞行器是指能够在临近空间以5马赫以上的速度飞行的大气或亚轨道飞行器。与传统的气动目标和卫星轨道目标不同,临近空间目标具有独特的高超声速助推-滑翔式运动轨迹,可以在一小时内快速攻击全球任何目标。特别是,随着agm-183a和x-51a等高超声速飞行器的成功测试,临近空间高超声速武器已成为实施全球打击战略的首选手段。但是,现有的雷达预警防御系统却无法有效地跟踪和拦截这类目标。
2、为了实现对高超声速目标的早期预警,雷达需在远距离探测目标。如果能够在远距离实现对高超声速目标的检测跟踪,雷达预警防御系统将会有足够的时间去应对这种高超声速武器威胁。然而,在远程探测模式下,倾斜距离模糊的问题将会被引入雷达测距。在倾斜距离模糊的情况下,我们很难区分接收到的雷达回波来自哪个发射脉冲信号,进而我们无法获得目标和雷达之间的真实距离。
3、作为一种经典的倾斜距离模糊解算方法,多脉冲重复频率方法被广泛应用于目标检测和跟踪领域。其优点是,在对目标进行相参积累检测的同时,该类方法可以解决倾斜距离模糊的问题。其缺点是,因为一个相参积累周期被分配给了多个脉冲重复频率,进而相参积累后的回波能量很难达到目标检测的门限。特别是,在低信噪比的情况下,倾斜距离模糊的问题将会因为目标的漏检而无法解决。
4、然而,高超声速目标却不可避免地存在一定的隐身特性。当目标以高超声速运动时,目标周围会产生大量的激波等离子体。这些激波等离子体能够强烈地吸收、散射和反射雷达电磁波,进而赋予目标一定的隐身特性。这也意味着,仅仅通过短时间内的相参积累是很难获得目标检测所需能量的,进而,无法有效解决倾斜距离模糊的问题。
技术实现思路
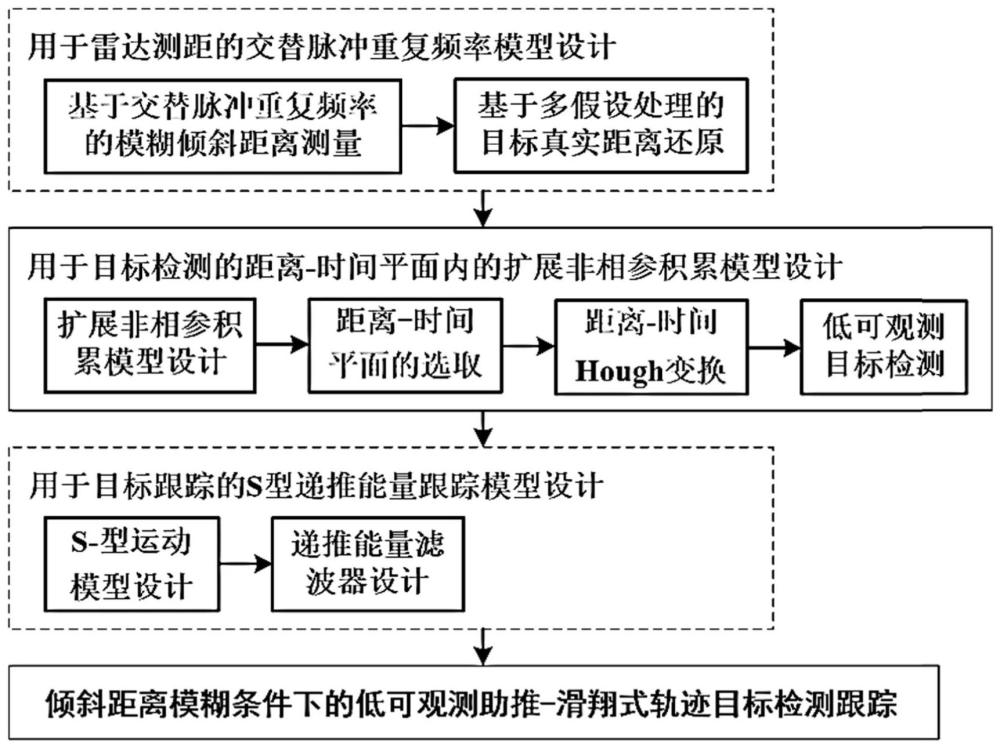
1、本发明提供的倾斜距离模糊条件下的低可观测助推-滑翔式轨迹目标检测跟踪方法,用以同时解决目标高超声速运动所衍生出的倾斜距离模糊、低可观测和助推-滑翔式机动复合影响下的目标检测跟踪难题。
2、方法包括:
3、s1:配置用于雷达测距的交替脉冲重复频率模型;
4、①采用脉冲重复频率交替变换的方式对目标的模糊倾斜距离进行测量;
5、②还原目标真实距离;
6、s2:定义用于目标检测的距离-时间平面内的扩展非相参积累模型;
7、①定义扩展非相参积累模型;
8、②选取距离-时间平面;
9、③基于距离-时间hough变换来扩展非相参积累检测方式;
10、④检测低可观测目标;
11、s3:配置用于目标跟踪的s型递推能量跟踪模型;
12、①配置s-型运动模型;
13、②设计递推能量滤波器,并通过递推能量进行更新,使目标跟踪始终保持在高信噪比的条件下,利用滤波算法获得目标航迹。
14、进一步需要说明的是,步骤s1中的采用脉冲重复频率交替变换的方式对目标的模糊倾斜距离进行测量方式还包括:
15、在同一采样周期内脉冲重复频率为恒定值,设目标在k时刻的模糊测量为,
16、
17、其中,ramb(k)是模糊倾斜距离,θ(k)是方位角,是俯仰角,a(k)是回波脉冲的幅度。
18、进一步需要说明的是,使用3个交替变换的脉冲重复频率来设计雷达的测距模型,则目标的模糊倾斜距离表示为
19、
20、其中,
21、
22、公式(3)计算的是第i个脉冲重复频率的模糊倾斜距离,采用如下方式进行计算,
23、
24、ttrue(k)是回波脉冲的实际时延,mod(·)表示模运算,ti=1/fi是脉冲重复周期,fi是第i个脉冲重复频率,c是光速,i=1,2,3。
25、进一步需要说明的是,步骤还原目标真实距离还包括:
26、基于雷达测距的第i个脉冲重复频率为fi,则fi对应的最大不模糊倾斜距离为,
27、ri=c/2fi (5)
28、如果以间隔ri对模糊倾斜距离进行扩展,则扩展的倾斜距离表示为,
29、
30、其中,rij(k)是第i个扩展倾斜距离,ni是扩展倾斜距离的数量;
31、如,真实距离小于雷达距离,则扩展倾斜距离的数量由下式给出:
32、ni=int(rmax/ri) (7)
33、其中,rmax为雷达的测距范围,int(·)表示取整操作;
34、目标的扩展测量由下式给出:
35、
36、其中,为第i个prf的第j个扩展测量值。
37、进一步需要说明的是,步骤s2中的定义扩展非相参积累模型还包括:
38、首先,对交替多脉冲重复频率量测进行多假设处理;其次,在对目标相参积累检测的同时再进行非相参积累检测,使低可观测目标的积累能量达到目标检测的门限;最后,完成对低可观测目标的检测。
39、进一步需要说明的是,步骤s2中的选取距离-时间平面还包括:
40、假设目标的倾斜距离为r=600km,雷达角度测量误差为δα=0.3°,则目标的位置测量偏差为,
41、
42、依据3δ判决准则,目标的位置测量偏差最大值为9.45km,目标的位置测量偏差远大于数百米大小的雷达距离测量误差。
43、进一步需要说明的是,步骤s2中的基于距离-时间hough变换来扩展非相参积累检测方式还包括:设(rij(k),t(k))是距离-时间平面中的一个点,其中,rij(k)是脉冲重复频率fi的第j个扩展倾斜距离,t(k)是rij(k)的时间标记,在平面中获得与所述点相对应的唯一曲线为如下方式,
44、
45、其中,ρ是(rij(k),t(k))点到原点的距离,是r轴和ρ轴之间的夹角;
46、如果多个曲线在平面中相交于一点,则在距离-时间平面内有一条直线与多个曲线相对应,该条直线表示为
47、
48、其中,(ρ0,)是多个曲线的交点,r和t分别是直线所对应的距离变量和时间变量。
49、进一步需要说明的是,步骤s2中的检测低可观测目标的方式还包括:将平面分割为大小为的几个单元格,使得目标能量在其中的一个单元中进行累积;
50、单元格(u,v)的中心表示为,
51、
52、
53、其中,
54、δρ=rmax/nρ (14)
55、
56、nρ是ρ单元的数量,是单元的数量,rmax是雷达的测距范围;
57、在对平面离散化的基础上,平面中的曲线用如下的1对映射替换为,
58、
59、其中,(rij(k),t(k))是距离-时间平面中的一个点,是平面中的个点的集合,;
60、在对平面中的曲线进行1对映射之后,点(rij(k),t(k))中的能量将存储在该曲线所通过的单元中,且单元格(u,v)中的能量表示为,
61、
62、其中,是单元格(u,v)中的现有能量,a(k)是(rij(k),t(k))点的能量;
63、如果距离-时间平面中的多个点近似连成一条直线,则多个点的能量将集中在平面中的一个单元中,使低可观测目标检测表述为如下的假设检验:
64、h0:,在单元格(u,v)中检测到目标;
65、h1:,在单元格(u,v)中没有检测到目标;
66、其中,λ为能量门限;
67、在假设h0成立的条件下,目标轨迹通过如下的hough逆映射中获得,
68、
69、进而从扩展的倾斜距离中检测到低可观测目标。
70、进一步需要说明的是,步骤s3中配置s-型运动模型方式还包括:
71、目标加速度的自相关函数设计为,
72、
73、其中,a(t)为t时刻的目标加速度,为a(t)的瞬时协方差,ω0为目标助推-滑翔式轨迹的角速率;
74、对目标加速度的自相关函数进行傅立叶变换,目标加速度的功率谱表示为,
75、
76、配置近似白化滤波器为,
77、
78、假设是在时域中的表达式,则的拉普拉斯变换表示为
79、
80、进而的微分方程表示为
81、
82、其中,v(t)是具有零均值和恒定方差的输入白噪声;
83、假设
84、
85、是t时刻x方向的目标状态向量,x(t),和分别是目标的位置、速度、加速度和加加速度,且有
86、
87、将状态相量x(t)代入的微分方程,则目标的连续运动方程表示为
88、
89、其中,
90、
91、β=[0 0 0 ω0]t (30)
92、对目标连续运动方程的两边进行积分变化,获得目标的离散运动方程
93、
94、对目标的离散运动方程进行重写为
95、x(k+1)=φx(k)+v(k) (32)
96、其中
97、
98、是状态转移矩阵,t是时间间隔,
99、
100、是具有恒定方差
101、
102、的零均值高斯白噪声。
103、进一步需要说明的是,步骤s3中设计递推能量滤波器还包括:
104、假设k时刻的递推能量为:
105、
106、其中,a(i)是第i个轨迹点的能量,i=k-m+1,k-m+2,...,k;
107、将递推能量e(k)引入滤波算法,为低可观测目标跟踪提供高信噪比的条件;进而目标航迹的更新用如下的假设检验来表示:
108、h0:e(k)≥λ,目标航迹的更新通过递推能量的更新来实现;
109、h1:e(k)<λ,目标航迹被终止;
110、其中,λ为能量门限,与目标检测的能量门限相同;
111、在假设h0的条件下,目标航迹通过跟踪门中的最大能量测量来更新,进而目标在低信噪比的条件下被实时跟踪;
112、假设
113、b(k+1)=max{b1(k+1),b2(k+1),...,bn(k+1)} (37)
114、是跟踪门中的最大测量点能量,其中,bi(k+1)是跟踪门中的第i个候选测量的能量,n是候选测量的数量;
115、将b(k+1)引入滤波算法,目标航迹通过跟踪门中的能量最大的测量点来更新,进而递推能量更新如下,
116、e(k+1)=e(k)+b(k+1)-a(k-m+1) (38)
117、其中,a(k-m+1)是递推能量中的最后时刻的轨迹点能量;
118、通过递推能量的更新,目标跟踪始终保持在高信噪比的条件下,进而目标航迹利用滤波算法获得。
119、从以上技术方案可以看出,本发明具有以下优点:
120、1)本发明提供的倾斜距离模糊条件下的低可观测助推-滑翔式轨迹目标检测跟踪方法一方面,将同一采样周期内的脉冲重复频率设计为定值,使其具备足够的能量进行相参积累检测;另一方面,将不同采样周期间的脉冲重复频率设计为交替变换的数值,使其具备解决倾斜距离模糊问题的条件,使得在目标检测跟踪的同时可以为解决倾斜距离模糊的问题提供条件。
121、2)本发明的方法是将多假设处理后的扩展量测和反隐身技术相结合,可在解决倾斜距离模糊的同时完成对低可观测目标的检测;本发明的方法不再将目标的量测转换为传统的位置测量,而是直接在距离时间平面对低可观测目标进行检测,可有效回避远程探测时所引入的位置测量偏差。
122、3)本发明还针对目标的低可观测特性,不局限于将目标的轨迹默认为直线运动的情况,而是利用周期性滑跃的方式对目标的助推-滑翔式轨迹进行预测,这样,在确保高检测概率的同时,还能兼顾目标的机动特性。本发明还针对目标的助推-滑翔式轨迹特性,该方法不再利用传统的最近邻滤波方式对目标量测进行实时跟踪处理,而是利用最大递推能量判决的方式对目标量测进行递推跟踪处理,进而在对目标的助推-滑翔式轨迹进行实时跟踪处理的同时,还能兼具较高的检测概率。
123、4)本发明可同时解决目标高超声速运动所衍生出的倾斜距离模糊、低可观测和助推-滑翔式机动的复合影响下的检测跟踪难题。
- 还没有人留言评论。精彩留言会获得点赞!