一种用于验证三角测距准确性的方法及系统与流程
本发明涉及三角测距,具体涉及一种用于验证三角测距准确性的方法及系统。
背景技术:
1、目前测量两点间的非接触测量技术主要有:红外测距、激光测距、干涉测距、超声波测距和三角测距等技术。红外测距和激光测距尚不能达到亚毫米精度,且易受外界环境影响。干涉测距目前能达微米的测量精度,但干涉技术要求的实验环境高,且设备体积大,不适于目标点微小及环境恶劣等客观限制条件。超声波测距尚不能达到亚毫米精度,且测距精度对空气密度和温度敏感。
2、基于上述原因,导致在进行亚毫米精度的测距时,红外测距、激光测距、和超声波测距方法由于测距精度不足,因此无法采用。而干涉测距方法由于需要将被测光反射回来,在待测目标较小时,不适合放置反射镜。针对此情况,基于三角法的镜头二维测距系统具有广阔发展前景。目前,基于三角法的测距系统被广泛地研究,与传统的测距方法相比,三角法具有原理清晰、结构简单等优点,已经被广泛地应用于机器人视觉、工业自动控制以及医药等领域。
3、为了使基于三角法的测距系统能进一步提高测距精度以及测距范围,需要对测距系统进行不断的校正和调试,但是现有的校验方法由于校验精度不足,在面对更高精度的校正和调整时,难以判断基于三角法的测距系统的测距精度是否达标,导致高精度的校正和调试难以实现。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种用于验证三角测距准确性的方法及系统,用于解决现有的校验方法校验精度不足的技术问题,从而达到进一步提高三角测距系统的测距精度的目的。
2、为解决上述问题,本发明所采用的技术方案如下:
3、一种用于验证三角测距准确性的方法,包括以下步骤:
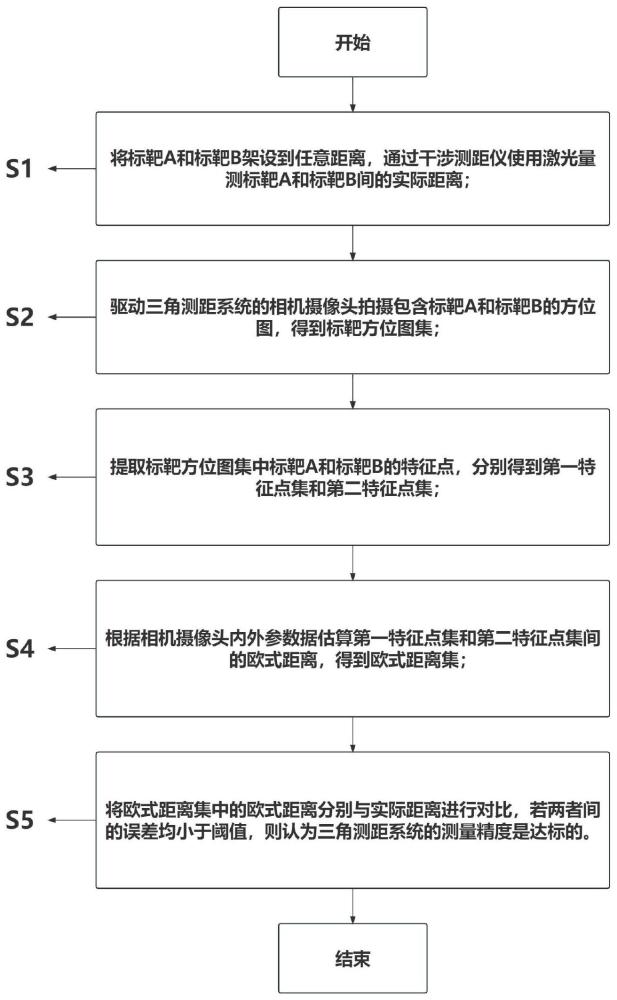
4、将标靶a和标靶b架设到任意距离,通过干涉测距仪使用激光量测所述标靶a和所述标靶b间的实际距离;
5、驱动三角测距系统的相机摄像头拍摄包含所述标靶a和所述标靶b的方位图,得到标靶方位图集;
6、提取所述标靶方位图集中所述标靶a和所述标靶b的特征点,分别得到第一特征点集和第二特征点集;
7、根据所述相机摄像头内外参数据估算所述第一特征点集和所述第二特征点集间的欧式距离,得到欧式距离集;
8、将所述欧式距离集中的欧式距离分别与所述实际距离进行对比,若两者间的误差均小于阈值,则认为所述三角测距系统的测量精度是达标的。
9、作为本发明优选的实施方式,在驱动相机摄像头拍摄包含所述标靶a和所述标靶b的方位图时,包括:
10、驱动所述相机摄像头至所述标靶a和所述标靶b的正中央位置,拍摄一张包含所述标靶a和所述标靶b的方位图,得到正中央位置标靶方位图;
11、其中,所述标靶方位图集包括所述正中央位置标靶方位图。
12、作为本发明优选的实施方式,在驱动相机摄像头拍摄包含所述标靶a和所述标靶b的方位图时,包括:
13、驱动所述相机摄像头在不同的方位拍摄包含所述标靶a和所述标靶b的方位图,得到不同方位下的标靶方位图;
14、其中,所述标靶方位图集包括所述不同方位下的标靶方位图。
15、作为本发明优选的实施方式,在提取所述标靶方位图集中所述标靶a和所述标靶b的特征点时,包括:
16、提取所述不同方位下的标靶方位图中所述标靶a和所述标靶b的中心圆点,分别得到第一中心圆点集和第二中心圆点集;
17、其中,所述第一中心圆点集包括不同方位下的第一中心圆点,所述第二中心圆点集包括不同方位下的第二中心圆点。
18、作为本发明优选的实施方式,所述标靶a和所述标靶b的中心圆点经成像后为类圆形,记作第一类圆形和第二类圆形;
19、在提取中心圆点时,包括:
20、去除所述不同方位下的标靶方位图的噪声;
21、对不同方位下的第一类圆形和第二类圆形的边缘进行像素级粗定位,识别不同方位下所述标靶a和所述标靶b的中心圆点;
22、对所述不同方位下的第一类圆形和第二类圆形的边缘进行亚像素级精定位;
23、对所述不同方位下的第一类圆形和第二类圆形的边缘点进行最小二乘拟合,得到不同方位下所述标靶a和所述标靶b的中心圆点的亚像素定位,完成中心圆点的提取。
24、作为本发明优选的实施方式,在进行像素级粗定位时,包括:
25、用canny算子提取出所述不同方位下的第一类圆形和第二类圆形的边缘,得到所述不同方位下的第一类圆形和第二类圆形的边缘点坐标;
26、在进行最小二乘拟合时,包括:
27、设所述不同方位下的第一类圆形和第二类圆形在进行亚像素级精定位后,得到的边缘点的数量为m,则拟合圆曲线如公式1所示:
28、
29、式中,(xi,yi)为所述不同方位下的第一类圆形和第二类圆形的边缘点坐标,f、r、g为未知数;
30、则误差函数如公式2所示:
31、ei=xif+yir+g+ai (2);
32、式中,ai=xi+yi,由m个误差函数可以列出m个误差方程;
33、基于所述f、r、g组成三阶法方程式,如公式3和公式4所示:
34、
35、则
36、通过伴随矩阵求逆法对所述公式4进行求解,如公式5、公式6、公式7、公式8所示:
37、δ=mpy+2wiq-w2y-i2p-mq2 (5);
38、
39、
40、
41、式中,p=[xx],q=[xy],w=[x],t=[x(x2+y2)],y=[yy],i=[y],b=[y(x2+y2)];
42、求得所述f、r、g后,则中心圆点的圆心坐标及半径,如公式9所示:
43、
44、式中,(x0,y0)为中心圆点的圆心坐标,r为中心圆点的半径。
45、作为本发明优选的实施方式,在估算所述第一特征点集和所述第二特征点集间的欧式距离时,包括:
46、基于所述第一特征点集和所述第二特征点集中所包含特征点的二维坐标,并根据所述相机摄像头内外参数据得到所述第一特征点集和所述第二特征点集中所包含特征点的三维坐标;
47、基于所述第一特征点集中一方位下特征点的三维坐标和所述第二特征点集中处于同一方位下的特征点的三维坐标,估算欧式距离,直至完成所有特征点欧式距离的估算,得到所述欧式距离集。
48、作为本发明优选的实施方式,在得到所述第一特征点集和所述第二特征点集中所包含特征点的三维坐标时,包括:
49、根据特征点的二维坐标和所述相机摄像头在x,y方向上的放大倍率,得到特征点的三维坐标,如公式10所示:
50、
51、式中,zc为所述相机摄像头到标靶的直线距离,(u,v)为方位图上的角点坐标,(fx,fy)为所述相机摄像头在x,y方向上的放大倍率,r为所述相机摄像头外参的旋转矩阵,t为所述相机摄像头外参的平移矩阵,(xw,yw,zw)为三维坐标系的角点坐标。
52、作为本发明优选的实施方式,在估算欧式距离时,如公式11所示:
53、d = sqrt( power(x1-x2,2)+power(y1-y2,2)+power(z1-z2,2)) (11);
54、式中,(x1,y1,z1)为所述第一特征点集中一方位下特征点的三维坐标,(x2,y2,z2)为所述第二特征点集中处于同一方位下的特征点的三维坐标。
55、一种用于验证三角测距准确性的系统,包括:
56、实际距离获取单元:在将标靶a和标靶b架设到任意距离后,用于获取通过干涉测距仪使用激光量测的所述标靶a和所述标靶b间的实际距离;
57、方位图获取单元:在驱动三角测距系统的相机摄像头拍摄包含所述标靶a和所述标靶b的方位图后,用于获取标靶方位图得到标靶方位图集;
58、特征点获取单元:用于提取所述标靶方位图集中所述标靶a和所述标靶b的特征点,分别得到第一特征点集和第二特征点集;
59、欧式距离获取单元:用于根据所述相机摄像头内外参数据估算所述第一特征点集和所述第二特征点集间的欧式距离,得到欧式距离集;
60、精度判断单元:用于将所述欧式距离集中的欧式距离分别与所述实际距离进行对比,若两者间的误差均小于阈值,则认为所述三角测距系统的测量精度是达标的。
61、相比现有技术,本发明的有益效果在于:
62、(1)本发明的方法提供一标靶a和标靶b,通过三角测距系统采集包含标靶a和标靶b的图像,并从图像上提取出标靶a和标靶b的特征点后,基于相机摄像头的内外参数据估算特征点间的距离,从而充分测试三角测距系统的测距能力,最后将其测距结果与干涉测距仪的测距结果进行比较,借助干涉测距微米级别的测量精度,准确判断三角测距系统的测距精度是否达标,实现高精度的校正和调试;
63、(2)本发明所提供的方法可通过三角测距系统采集不同方位下包含标靶a和标靶b的图像,并从不同方位下的图像上提取出标靶a和标靶b的特征点后,基于相机摄像头的内外参数据估算不同方位下特征点间的距离,从而充分测试三角测距系统的相机摄像头在不同方位下的测距能力,最后将不同方位下的测距结果与干涉测距仪的测距结果进行比较,从而借助干涉测距微米级别的测量精度,准确判断三角测距系统在不同方位下的测距精度是否达标,实现不同方位下高精度的校正和调试。
64、下面结合附图和具体实施方式对本发明作进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!