一种光纤触觉传感器及制备方法
本发明涉及一种光纤触觉传感器,属于智能传感。
背景技术:
1、光纤触觉传感器是一种用于测量触觉和应变的传感器技术,它利用光纤的性质来检测外部环境中的变化。光纤触觉传感器的基本原理是利用光信号在光纤中传播时受到外部应变的影响,这种应变会导致光纤中的光信号发生改变,如相位变化或光强度变化,这些变化可以被测量和分析,从而确定外部的触觉或应变信息。光纤触觉传感器可以采用不同的工作原理,包括干涉型、散射型和光强度型。干涉型光纤传感器基于外部应变引起的光程差变化,散射型传感器基于散射光信号的变化,而光强度型传感器则关注光强度的变化。现有的光纤触觉传感器,采用的光栅光纤对于光信号解调设备要求严格,成本高,光栅光纤本身制造工艺复杂。目前针对光纤触觉传感器技术,发现至少以下几项问题:
2、1)光栅光纤中的光栅属于高精密结构,制备工艺复杂,设备昂贵;
3、2)光栅光纤的光栅信号解调器属于高精密电子设备,价格高昂;
4、3)光强型触觉传感器适用于单点触觉测量,难以实现触觉阵列。
5、cn115574998a公开了一种反射式探头结构的光纤光斑触觉传感器,施加在探头接触件上的力将引起反射器的形变,从而引起输出光斑的变化,将光斑图样作为传感信号,由于光斑变化主要由反射器形变引起,输出光纤弯曲状态的改变对输出光斑影响较小,因此具有抗弯曲干扰能力;但是该方案针对单点触觉检测,难以进行大面积规模化触觉测量。cn116067542a公开了本发明公开一种力学各向异性圆柱体光纤光栅式三维力触觉传感器对三维力的大小和方向识别的方法,受到法向力的作用圆柱体沿z轴压缩,使得两根fbg同时压缩,中心波长同时向短波长方向漂移;通过两根fbg的中心波长漂移量正负及比例关系识别切向力的角度,通过漂移量的幅值识别切向力的大小;但是该方案采用光栅光纤作为敏感单元,光栅制备工艺复杂,光栅信号解调成本高。
技术实现思路
1、本发明所要解决的技术问题是:现有的光纤触觉传感器,由于光栅、制备工艺复杂,光栅信号解调器设备成本高,造成光纤触觉阵列传感器的生产成本比较高;
2、本发明进一步所要解决的技术问题是:现有的光纤触觉传感器难以实现大面积触觉测量。
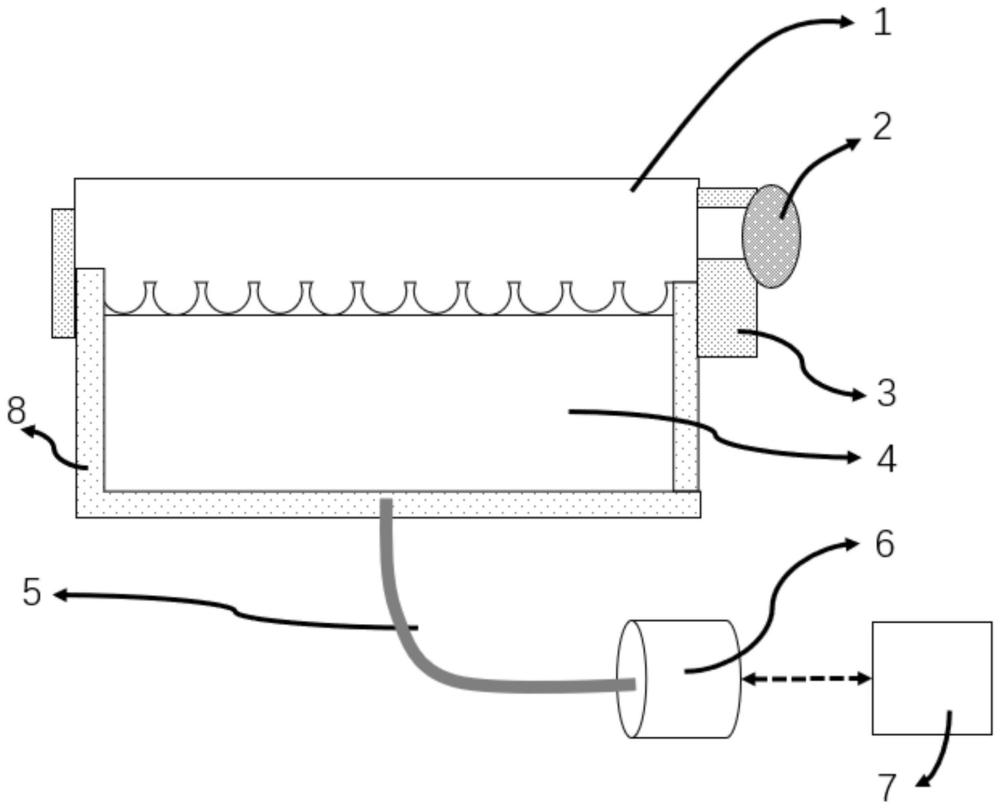
3、为解决上述技术问题,本发明提供一种光纤触觉传感器,包括一个或多个触觉单元,触觉单元通过光纤5与摄像头6连接,所述摄像头6与数据处理单元7连接,所述数据处理单元7用于对图像数据进行处理计算,得到触觉信息;
4、所述触觉单元包括外壳8,在外壳8内设置有集光层4,在集光层4的上部贴合设置有导光覆盖层1,框架3将导光覆盖层固定;框架3安装在外壳8上部;
5、多色彩光源2设置在导光覆盖层1的一侧,导光覆盖层1下表面为凸起状阵列结构;
6、光纤5穿过外壳8与集光层4相连。
7、前述的一种光纤触觉传感器,所述多色彩光源2固定在框架3的光源预留孔内上;所述多色彩光源2各色彩光源均匀排列,各色彩光源间距为5毫米。
8、前述的一种光纤触觉传感器,所述导光覆盖层1下表面的凸起是半球形、金字塔锥、圆锥或台体。
9、前述的一种光纤触觉传感器,当凸起为半球形时,半球形直径为1.8毫米,半球之间间距为2毫米,阵列规模为每行10个,共10行。
10、前述的一种光纤触觉传感器,所述导光覆盖层1采用二甲基硅氧烷pdms材料,厚度为2-3毫米;所述集光层4材料为聚二甲基硅氧烷pdms;所述外壳8材料为聚乳酸pla。
11、前述的一种光纤触觉传感器,所述触觉单元为4个,为2*2阵列排列;或
12、所述触觉单元为7个,每个触觉单元为六边形,一个中心位置的触觉单元外部包围6个触觉单元。
13、前述的一种光纤触觉传感器,在数据处理单元7中,运行有图像数据处理模块,用于对图像数据进行处理计算,所述图像数据处理模块采用卷积神经网络对图像数据进行处理,所述卷积神经网络结构为:
14、c1:一个接收224×224×3大小的rgb图像输入的输入层(101),用于接收待分类的图像数据;
15、c2:第一个卷积层(102),用于对c1输出图像进行卷积计算,并将图像矩阵维度转换为224×224×32;
16、c3:一个最大池化层(103),用于对c2输出图像进行降低数据维度至112×112×32;
17、c4:第二个卷积层(104),对前一层的输出进行卷积操作,将图像矩阵维度增加至112×112×64;
18、c5:第二个最大池化层(105),将数据维度降低至56×56×64;
19、c6:第三个卷积层(106),将图像数据矩阵维度增加至56×56×128;
20、c7:第三个最大池化层(107),将前一层数据维度减小至28×28×128;
21、c8:数据展平层(108),用于将前一层28×28×128的图像数据矩阵展平为一个2048元素的向量;
22、c9:具有relu激活函数的全连接层(109),用于对前一层展平的数据进行处理;
23、c10:最后的全连接层(110),具有softmax激活函数,用于对前一层数据的不同类别进行分类;所述softmax激活函数输出预测类别的概率分布,用于指示力的位置和力的幅度,具有最高概率的输出标签反映出图像来自于特定的测试位置和力的幅度。
24、一种光纤触觉传感器的制备方法,包括以下步骤:
25、s1:设计光纤触觉传感器顶部导光覆盖层的模具;所述模具包括上、下两部分,下部分模具包括与凸起状阵列结构相配合的凹部;
26、s2:采用聚乳酸pla材料,使用挤出式3d打印机制造光纤触觉传感器顶部导光覆盖层的上、下两部分模具;
27、s3:将上、下两个模具部分组装在一起,并使用硅胶粘合剂进行临时密封,以防止聚二甲基硅氧烷pdms泄漏;
28、s4:将pdms套装的硅胶与交联剂按10:1比例混合,将混合物倒入覆盖层模具中,然后在70-80摄氏度的热箱中固化0.8-1小时;
29、s5:从pla模具中脱模pdms,形成导光覆盖层,然后将导光覆盖层裁剪成的设定形状与尺寸,裁剪后的导光覆盖层包括额外设定尺寸的余量边缘,用于粘附到支撑导光覆盖层的框架3上;
30、s6:设计并制造触觉传感器外壳8,然后在外壳8底部插入一段光纤5;
31、s7:向外壳8内部注入聚二甲基硅氧烷pdms,并在70-80摄氏度的烤箱中固化0.8-1小时,制备成集光层4;
32、s8:设计并使用pla材料制造框架3,用于固定导光覆盖层1,在框架3上设置有光源支架,用于放置多色彩光源2;
33、s9:将导光覆盖层1、外壳8和框架3组装在一起,使导光覆盖层、集光层、光纤组装在一起,共同构成光纤触觉传感器的触觉单元;
34、s10:将触觉单元的光纤连接到摄像头6;
35、s11:将摄像头6与数据图像处理系统7连接,构成光纤触觉传感器。
36、前述的一种光纤触觉传感器的制备方法,在步骤s8中,光源支架上预留出led光源的安装孔,安装孔数量与多色彩光源基本颜色数量相同。
37、前述的一种光纤触觉传感器的制备方法,在步骤s9与s10之间还包括以下步骤:
38、按步骤s1-s9制备四个触觉单元,并按2*2阵列布置装配;或
39、按步骤s1-s9制备7个触觉单元,一个中心位置的触觉单元外部包围6个触觉单元。
40、本发明达到的有益效果:本发明的一种光纤触觉传感器,感知结构模拟了皮肤表皮和真皮之间的复杂结构,感知原理上利用了多色彩光场进入多模光纤传播色散后在光纤远端形成的图像信息,对图像信息进行分析计算得到触觉信息。传感器包括导光覆盖层、多色彩光源、集光层、外壳、多模光纤、摄像头及数据处理系统;多色彩光源发射光线进入导光覆盖层,并在导光覆盖层内部形成结构光场,导光覆盖层下表面制备了仿生凸起,与集光层接触,当有触力、或温度变化施加在导光覆盖层上表面时,导光覆盖层下表面与集光层上表面的接触会变化,引起结构光发生变化,变化的光场会被集光层收集,进入光纤的近端,经光纤传播色散后至光纤的远端,由摄像头收集光纤远端彩色图像,图像数据由数据处理系统进行分析处理,得到覆盖层上的触觉信息。
41、本发明的一种光纤触觉传感器,设计了凸起状阵列的结构作为覆盖层感知结构,采用了多色彩光场作为触觉信息的载体,利用机器学习方法处理光纤远端图像数据,与其他压阻式、电容式,光栅光纤等触觉传感器相比,制备成本低,弥补了传统光栅光纤触觉传感器光栅信号解调系统复杂,价格昂贵的缺点。
42、本发明的光纤触觉传感器多个触觉单元能够组成触觉传感阵列,克服了传统压阻式、电容式传感器引线多,易故障,成本高的缺点。
43、同时,触觉单元组合排列可以实现大面积触觉测量,降低了大面积触觉测量实现的困难,对于其他场合如变形检测具备参考价值。
- 还没有人留言评论。精彩留言会获得点赞!