一种基于虚实结合的智能驾驶车路云测试系统的制作方法
本申请涉及车辆智能驾驶测试,尤其涉及一种基于虚实结合的智能驾驶车路云测试系统。
背景技术:
1、智能网联汽车,搭载有先进的车载传感器、控制器、执行器等装置,融合现代通信与网络技术,实现车与人、路、云等智能信息交换共享,具有安全、舒适、节能、高效的特点。随着智能网联技术的发展,对车辆的功能测试需求也愈加急迫。
2、现有技术主要是在仿真、封闭场地测试和开放测试道路条件下,对无人驾驶车辆进行测试。面临测试里程和测试时间急剧增加带来的挑战,针对封闭场地和开放测试道路的实车测试,依赖于实际道路环境的基础设施和其他交通参与者情况,在复杂的应用场景或者极限场景的测试中,面临测试环境不够贴近真实环境、可操作性较差或者容易出现危险的问题。
3、针对上述存在的不足,特提出本申请。
技术实现思路
1、为了解决上述技术问题,本申请提供了一种基于虚实结合的智能驾驶车路云测试系统,本申请所提供的基于虚实结合的智能驾驶车路云的测试系统,可以降低测试费用、提升测试场景的真实性和多样性,以及降低极限场景的危险程度。
2、本申请实施例提供了一种基于虚实结合的智能驾驶车路云测试系统,包括:
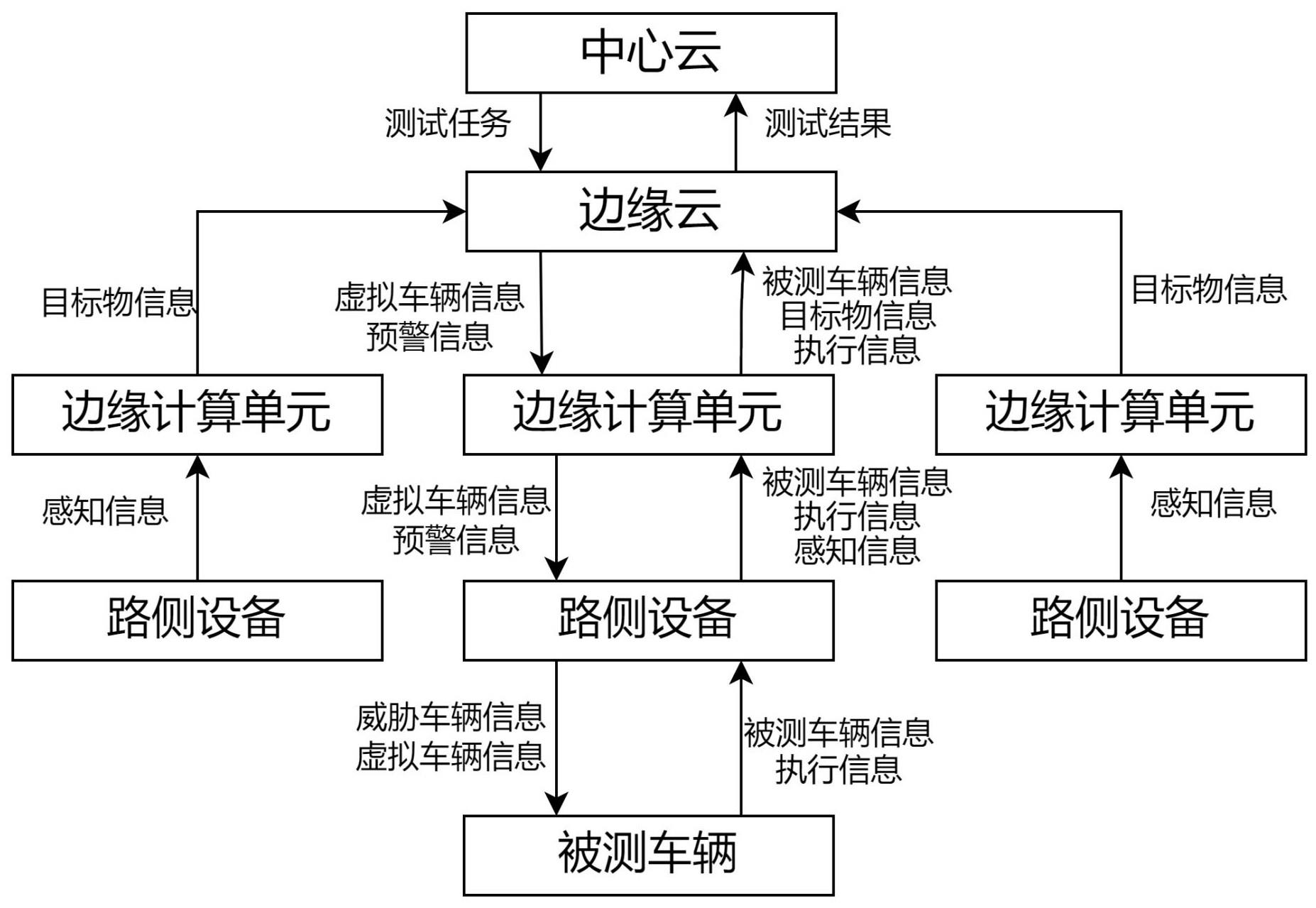
3、中心云,用于将测试任务下发到边缘云;
4、边缘云,用于解析测试任务,根据测试任务的解析结果融合边缘计算单元上传的实际道路上的目标物信息,基于所述目标物信息和被测车辆信息生成虚拟车辆信息,基于所述目标物信息和测试任务生成预警信息,将所述虚拟车辆信息和预警信息下发至所述边缘计算单元;
5、所述边缘计算单元,用于将虚拟车辆信息通过路侧设备转发给被测车辆;将所述预警信息发送至所述路侧设备;
6、所述路侧设备,用于根据所述预警信息确定对所述被测车辆产生交通威胁的威胁车辆,将所述威胁车辆信息发送至所述被测车辆;
7、所述被测车辆,用于根据所述虚拟车辆信息、威胁车辆信息和本车感知信息进行决策和执行,将执行信息依次通过路侧设备、边缘计算单元发送至边缘云;所述边缘云根据所述执行信息生成测试结果并反馈给所述中心云。
8、可选的,所述边缘云在基于所述目标物信息和被测车辆信息生成虚拟车辆信息时,具体用于:
9、从目标物信息中选择与被测车辆有驾驶干扰的车辆,作为被泛化车辆;
10、从当前时刻起,预测所述被泛化车辆在连续多个未来时刻的位置,在每个位置周围选择未占用空间点作为虚拟车辆路径点;
11、以当前时刻所述被泛化车辆的状态为初始状态,经过虚拟车辆的多个路径点,生成虚拟车辆的行驶信息。
12、可选的,所述从当前时刻起,预测所述被泛化车辆在连续多个未来时刻的位置,在每个位置周围选择未占用空间点作为虚拟车辆路径点,包括:
13、生成当前时刻及连续多个未来时刻路段的鸟瞰图,并在鸟瞰图的网格中标注所述被泛化车辆和其他目标物的位置;
14、在每张鸟瞰图中选择所述被泛化车辆周围且未被目标物占用的网格,作为虚拟车辆的路径点;
15、所述虚拟车辆的数量为至少一个。
16、可选的,所述以当前时刻所述被泛化车辆的状态为初始状态,经过虚拟车辆的多个路径点,生成虚拟车辆的行驶信息,包括:
17、建立虚拟车辆控制模型、运动学模型和动力学模型;
18、设置所述虚拟车辆控制模型、运动学模型和动力学模型的参数以使虚拟车辆经过多个路径点,生成虚拟车辆的行驶信息。
19、可选的,在生成虚拟车辆的行驶信息之后,边缘云还用于:
20、将所述虚拟车辆的行驶信息加入宏观交通流,进行交通流稳定状态验证;
21、如果通过验证,将所述虚拟车辆的信息下发至所述边缘计算单元。
22、可选的,所述在每张鸟瞰图中选择所述被泛化车辆周围且未被车辆占用的网格,作为虚拟车辆的路径点,包括:
23、将每个标注后的鸟瞰图输入至预先训练的预测神经网络中;
24、通过所述预测神经网络输出每张鸟瞰图中虚拟车辆的位置信息。
25、可选的,在将每个标注后的鸟瞰图输入至预先训练的预测神经网络中之前,还包括:
26、获取用于训练所述预测神经网络的样本;
27、采用所述样本训练所述预测神经网络;
28、其中,样本为在被泛化车辆周围且未被车辆占用的网格上标记虚拟车辆位置的鸟瞰图,所述虚拟车辆通过交通流稳定状态验证。
29、可选的,所述从目标物信息中选择与被测车辆有驾驶干扰的车辆,作为被泛化车辆,包括:
30、从目标物信息中选择与被测车辆未来一段时间内行驶路径有交叉点的车辆,作为被泛化车辆;和/或,
31、从目标物信息中选择距离小于设定值且行驶方向相同的车辆,作为被泛化车辆。
32、可选的,所述被测车辆,用于将本车信息通过路侧设备上传至所述边缘计算单元;所述路侧设备,用于将采集到的感知信息上传至所述边缘计算单元;
33、所述边缘计算单元,用于对感知信息融合得到目标物信息,将所述目标物信息和被测车辆信息发送至边缘云;
34、所述边缘云,用于融合多个连续路口的边缘计算单元上传的目标物信息和被测车辆信息,生成虚拟车辆信息和预警信息。
35、可选的,所述测试任务包括测试目的、测试时间、测试场景和测试要求。
36、本申请提出的系统有以下技术效果:
37、1)本申请所提供的基于虚实结合的智能驾驶车路云的测试系统,可以降低测试费用、提升测试场景的真实性和多样性,以及降低极限场景的危险程度。
38、2)边缘云生成虚拟车辆信息和预警信息给被测车辆,从而被测车辆根据虚拟车辆信息、威胁车辆信息和本车感知信息进行决策和执行。本申请在实际交通流中增加了虚拟车辆和威胁车辆,提高了道路目标物的多样化程度,通过设计威胁车辆,可以充分测试被测车辆对云端预警信息的响应情况,实现真正的车路云协同测试。
39、3)本申请通过在鸟瞰图中寻找未占用网格的方式确定虚拟车辆的路径点,再连接形成行驶信息,实现在实际交通流中生成不妨碍交通且对被测车辆有影响的虚拟车辆,有利于对被测车辆进行灵活测试。
40、4)本申请通过神经网络自动生成通过交通流稳定状态验证的网格位置,提高了处理效率。
技术特征:
1.一种基于虚实结合的智能驾驶车路云测试系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述边缘云在基于所述目标物信息和被测车辆信息生成虚拟车辆信息时,具体用于:
3.根据权利要求2所述的系统,其特征在于,所述从当前时刻起,预测所述被泛化车辆在连续多个未来时刻的位置,在每个位置周围选择未占用空间点作为虚拟车辆路径点,包括:
4.根据权利要求2所述的系统,其特征在于,所述以当前时刻所述被泛化车辆的状态为初始状态,经过虚拟车辆的多个路径点,生成虚拟车辆的行驶信息,包括:
5.根据权利要求2所述的系统,其特征在于,在生成虚拟车辆的行驶信息之后,边缘云还用于:
6.根据权利要求3所述的系统,其特征在于,所述在每张鸟瞰图中选择所述被泛化车辆周围且未被车辆占用的网格,作为虚拟车辆的路径点,包括:
7.根据权利要求6所述的系统,其特征在于,在将每个标注后的鸟瞰图输入至预先训练的预测神经网络中之前,还包括:
8.根据权利要求2所述的系统,其特征在于,所述从目标物信息中选择与被测车辆有驾驶干扰的车辆,作为被泛化车辆,包括:
9.根据权利要求1所述的系统,其特征在于,
10.根据权利要求1-9任一项所述的系统,其特征在于,所述测试任务包括测试目的、测试时间、测试场景和测试要求。
技术总结
本申请涉及一种基于虚实结合的智能驾驶车路云测试系统,涉及车辆智能驾驶测试技术领域,其中,中心云,用于将测试任务下发到边缘云;边缘云,用于解析测试任务,根据测试任务的解析结果融合边缘计算单元上传的实际道路上的目标物信息,基于目标物信息和被测车辆信息生成虚拟车辆信息,将虚拟车辆信息和预警信息下发至边缘计算单元;边缘计算单元将虚拟车辆信息通过路侧设备转发给被测车辆;将预警信息发送至路侧设备;被测车辆根据虚拟车辆信息、威胁车辆信息和本车感知信息进行决策和执行。本申请所提供的基于虚实结合的智能驾驶车路云的测试系统,可以降低测试费用、提升测试场景的真实性和多样性,以及降低极限场景的危险程度。
技术研发人员:刘爽爽,赵博文,马宇宸,扈鹏,牛宏宇,陈宏硕
受保护的技术使用者:中汽传媒(天津)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!