分布式雷达系统的最优到达时间估计方法、系统及设备
本发明属于分布式多输入多输出(mimo)雷达系统到达时间(toa)估计,尤其涉及一种分布式雷达系统的最优到达时间估计方法、系统及终端。
背景技术:
1、分布式mimo雷达系统是目标搜索和追踪定位领域中一项关键技术。在该系统中,包括多个雷达收发天线和一个或多个被定位目标。被定位目标往往不能独自的收发或处理信号,而是通过反射来自雷达的电磁波来实现信号发送。现有的定位方法主要基于到达角(aoa),接收信号强度(rss),到达时间(toa)和到达时间差(tdoa)。这些方法的定位精度依赖于参数估计的精度。其中rss估计主要利用路径损耗模型,因此易受多径效应的影响,导致测量信号强度与理论结果有较大偏差,使得估计精度无法达到要求。aoa估计主要基于雷达接收机的天线阵列结构,要求多个接收天线规则排列,因此需要复杂的硬件条件和制作工艺。因此,基于toa和tdoa的定位和追踪往往是分布式雷达系统的不错选择,这类定位方案需要的接收机结构与rss类似,并且可以通过时域信息消除多径带来的影响。
2、对于传统的多输入多输出(mimo)信道,toa估计往往通过最小二乘(ls)的方法求得。在分布式mimo雷达系统信道中,由于被定位目标是一个被动元件并且不具备信号处理能力,toa估计往往只能在接收端进行。分布式mimo雷达系统信道主要有两种结构:一种是m×n的双基地结构,其中包含m根发送天线和n根接收天线;另一种是m×m的单基地结构,其中包含m根天线同时用于发送和接收信号。对于双基地结构,m根发送天线发送信号到被定位目标,之后被定位目标利用接收信号的能量发射信号到接收天线。在这种情况下,上行链路信道(发送端到被定位目标)和下行链路信道(被定位目标到接收端)不同,任意一条toa信道(发送端到接收端)的时延等于上行链路时延和下行链路时延的和。单基地结构是一种全双工结构,即收发端共用一组天线,所以上行链路信道和下行链路信道可以被建模为相同的信道。显然分布式mimo雷达系统信道相较于传统的mimo信道更为复杂,可以看出分布式mimo雷达系统信道的子信道在某些部分是相关的。
3、现有的关于toa估计研究主要包括特定接收波形的toa估计,特定接收机结构的toa估计或是研究多径效应对toa估计的影响。本发明设计出一种最优分布式mimo雷达系统toa估计方法,与现存的技术完全不同。
4、通过上述分析,现有技术存在的问题及缺陷为:
5、(1)现有的定位方法基于到达角(aoa),接收信号强度(rss),到达时间(toa)和到达时间差(tdoa),其定位精度依赖于参数估计的精度。
6、(2)rss估计主要利用路径损耗模型,因此易受多径效应的影响,导致测量信号强度与理论结果有较大偏差,使得估计精度无法达到要求。aoa估计主要基于雷达接收机的天线阵列结构,要求多个接收天线规则排列,因此需要复杂的硬件条件和制作工艺。相较而言,基于toa和tdoa的定位和追踪往往是分布式雷达系统的不错选择,这类定位方案需要的接收机结构与rss类似,并且可以通过时域信息消除多径带来的影响。
7、(3)现有的mimo雷达toa定位中的到达时间估计方法为最小二乘法,该方案对于一般的mimo信道是最优的估计方案,而对于mimo雷达被动定位系统并非最优,还有巨大的提升空间。同时,目前关于分布式雷达到达时间估计的研究都侧重于独立的估计每一条信道,并没有考虑多条信道的关联性,并不是最优解。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种分布式雷达系统的最优到达时间估计方法、系统及设备。另外,由于分布式mimo雷达(如图2(a)所示)和mimo反射通信(如图2(b)所示)具有完全相同的拓扑结构,上述分布式雷达系统的最优到达时间估计方法、系统及设备,也同样适用于mimo反射通信(又称反向散射通信、后向散射通信,英文backscattercommunications)系统中的到达时间估计。
2、本发明是这样实现的,一种分布式雷达系统的最优到达时间估计方法,所述分布式雷达系统的最优到达时间估计方法包括:分别利用约束法和迭代最小二乘法实现分布式mimo双基地雷达系统的toa估计,分别利用约束法和迭代最小二乘法实现分布式mimo单基地雷达系统的toa估计。
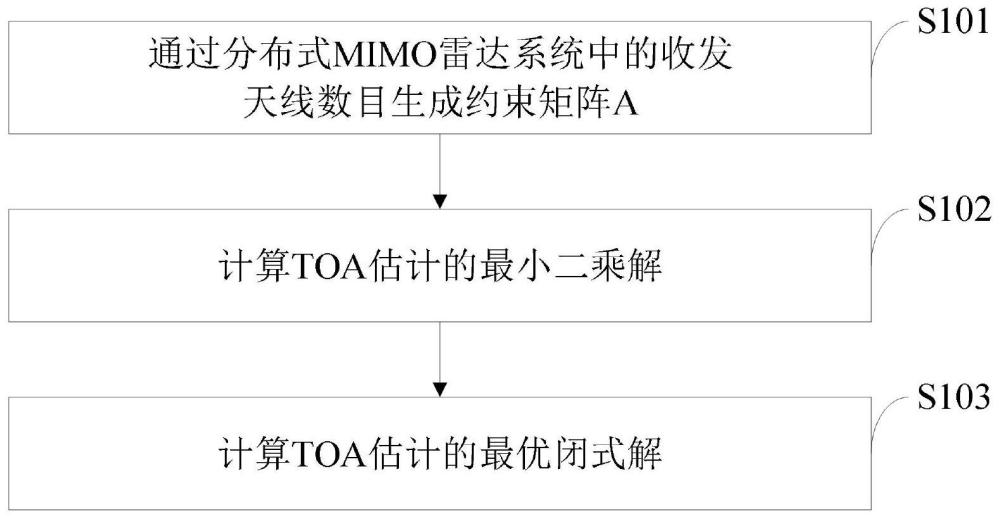
3、进一步,所述利用约束法实现分布式mimo双基地雷达系统toa估计包括:
4、(1)通过分布式mimo双基地雷达系统中的发送天线数目和接收天线数目m和n生成约束矩阵a;
5、(2)计算toa估计的最小二乘解
6、(3)计算toa估计的最优闭式解
7、进一步,所述步骤(1)中的通过分布式mimo双基地雷达系统中的发送天线数目和接收天线数目m和n生成约束矩阵a包括:
8、(1)初始化a为(m-1)×(n-1)行m×n列的全零矩阵;
9、(2)for p=1 to p=(m-1)×(n-1)do
10、(3)
11、(4)[a]p,q=1;
12、(5)[a]p,q+1=-1;
13、(6)[a]p,q+m=-1;
14、(7)[a]p,q+m+1=1;
15、(8)end for;
16、其中,ceil()是向上取整操作,[a]p,q是矩阵a的第p行第q列的元素;
17、所述步骤(2)中的计算toa估计的最小二乘解包括:
18、
19、其中,s是发送矩阵,y是到达时间观测向量;
20、所述步骤(3)中的计算toa估计的最优闭式解包括:
21、
22、其中,imn是m×n行m×n列的单位矩阵。
23、进一步,所述利用迭代最小二乘法实现分布式mimo双基地雷达系统的toa估计包括:
24、(1)计算toa估计的最小二乘解
25、
26、其中,x是发送矩阵,y是到达时间观测矩阵;
27、(2)初始化h为m行1列的全零矩阵,计算h和g的估计值:
28、
29、
30、其中,和分别是对矩阵按行求和和按列求和;
31、(3)计算toa估计的最优闭式解
32、
33、其中,是对矩阵所有元素求和,运算对应行向量和列向量的加法运算。进一步,所述利用约束法实现分布式mimo单基地雷达系统toa估计包括:
34、(1)根据分布式mimo单基地雷达系统的信道结构,通过收发天线数目m得到约束矩阵a;
35、(2)计算toa估计的最小二乘解
36、
37、其中,s是发送矩阵,y是到达时间观测向量;
38、(3)计算toa估计的最优闭式解
39、
40、
41、其中,vec()是按列向量化矩阵,unvec()是vec()的逆过程。
42、进一步,所述利用迭代最小二乘法实现分布式mimo单基地雷达系统的toa估计包括:
43、(1)计算toa估计的最小二乘解
44、
45、其中,x是发送矩阵,y是到达时间观测矩阵;
46、(2)初始化h为m行1列的全零矩阵,计算h和g的估计值:
47、
48、
49、其中,和分别是对矩阵按行求和和按列求和;
50、(3)计算toa估计的最优闭式解
51、
52、
53、其中,是对矩阵所有元素求和,运算对应行向量和列向量的加法运算。
54、本发明的另一目的在于提供一种实施所述的分布式雷达系统的最优到达时间估计方法的分布式雷达系统的最优到达时间估计系统,所述分布式雷达系统的最优到达时间估计系统包括:
55、双基地雷达系统toa估计模块,用于分别利用约束法和迭代最小二乘法实现分布式mimo双基地雷达系统的toa估计;
56、单基地雷达系统toa估计模块,用于分别利用约束法和迭代最小二乘法实现分布式mimo单基地雷达系统的toa估计。
57、本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述的分布式雷达系统的最优到达时间估计方法的步骤。
58、本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述的分布式雷达系统的最优到达时间估计方法的步骤。
59、本发明的另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现所述的分布式雷达系统的最优到达时间估计系统。
60、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
61、第一、本发明设计了一种新的toa估计方法用于分布式mimo雷达定位系统,这种方法通过利用分布式mimo雷达系统的信道结构得出了一种最优的toa估计方法。相比于传统的toa估计方法,这种估计方法可以极大的提高估计精度,并且这种估计器的最终形式为闭式解,这也意味着该发明的实现需要极低的时间复杂度和硬件成本。此外,相较于传统的最小二乘toa估计方法,本发明的toa估计方法也可以使toa定位精度提升。本发明也可以应用到于分布式mimo雷达系统具有类似结构的场景中,对于所有的被动定位场景(后向反射系统),此发明同样适用。
62、本发明提供的用于分布式多输入多输出(mimo)雷达系统的到达时间(toa)估计方法,该方法以闭式解的形式给出。本发明的估计方法主要利用分布式mimo雷达系统的信道拓扑结构来提高到达时间的估计准确度,可以为toa估计带来较大的性能提升:对于一般的m×n双基地mimo系统,本发明的toa估计方法的均方误差为对于一般的m×m单基地mimo系统,所发明估计方法均方误差对于对角子信道为对于非对角子信道为其中是传统最小二乘估计方法的均方误差。此外,本发明方法的性能达到了mimo雷达系统toa估计的性能上界,所以是一种最优估计。最后,仿真结果验证了本发明的方法可以极大地提高估计和定位精度,尤其是在大规模mimo系统中。
63、第二,本发明算法可用于分布式mimo雷达系统的到达时间(toa)估计方法、系统、介质、设备及终端,也可用于mimo反射通信toa估计方法、系统、介质、设备及终端。现以分布式mimo雷达为例介绍技术背景,mimo反射通信在核心算法上与其完全一致。本发明给出了分布式mimo雷达系统的最优到达时间估计算法,可以极大的提高定位精度。同时本发明算法的应用场景不仅限于分布式mimo雷达系统,对于所有的被动定位场景,本发明算法都适用,例如后向反射定位系统等。或者说对于与分布式mimo雷达系统具有相同信道结构的应用场景,本发明的算法都适用。
64、第三,作为本发明的权利要求的创造性辅助证据,还体现在以下几个重要方面:
65、本发明的技术方案转化后的预期收益和商业价值为:其一,本发明适用于分布式雷达到达时间估计,会大幅度提高到达时间估计精度,因此本专利可以为雷达厂商提供更好的算法,提高系统性能及其商业价值。其二,本发明也可转化为物联网领域的商业价值,例如后向反射通信系统,产生更多的附加价值。
66、本发明的技术方案填补了国内外业内技术空白:国内外目前采用的mimo雷达被动定位系统的到达时间估计方法都是对多个toa信道进行独立的估计,本发明通过利用mimo雷达被动定位系统的拓扑结构挖掘toa信道的内在联系,给出了该系统下最优的到达时间估计方法。
67、本发明的技术方案解决了人们一直渴望解决、但始终未能获得成功的技术难题:高精度的到达时间估计是定位领域的基础。本发明针对这一问题,给出了mimo雷达被动定位系统的最优到达时间估计方法,解决了人们对toa估计误差最小方法的技术难题。
68、本发明的技术方案克服了技术偏见:现有技术往往认为分布式雷达到达时间估计的最优上界就是单个天线的到达时间估计上界,忽视了多天线之间的关联性,本发明充分挖掘分布式雷达的拓扑结构,得出了这种结构下的最优到达时间估计算法。
69、第四,这种分布式雷达系统的最优到达时间估计方法在工业应用上可能存在的技术进步包括:
70、1.提高估计精度:该方法分别利用约束法和迭代最小二乘法实现分布式mimo双基地雷达系统和分布式mimo单基地雷达系统的toa估计,能够更准确地估计信号的到达时间,提高估计精度,从而更好地满足工业应用中对信号处理的需求。
71、2.降低计算复杂度:该方法通过利用约束法和迭代最小二乘法,能够降低计算复杂度,提高计算效率,满足工业应用中对实时处理和高效率的需求。
72、3.适应性强:该方法能够适应不同类型的分布式雷达系统,包括分布式mimo双基地雷达系统和分布式mimo单基地雷达系统,具有更强的适应性和可扩展性,能够满足工业应用中对不同类型雷达系统的需求。
73、4.鲁棒性高:该方法分别利用约束法和迭代最小二乘法进行估计,能够降低单一算法带来的误差和风险,提高鲁棒性,满足工业应用中对稳定性和可靠性的要求。
74、综上所述,这种分布式雷达系统的最优到达时间估计方法在工业应用中具有较大的技术进步,能够提高估计精度、降低计算复杂度、适应性强和鲁棒性高,满足工业应用中对信号处理的需求。未来研究可以进一步探索该方法在其他雷达系统中的应用和扩展,推动其在实际应用中的广泛应用。
- 还没有人留言评论。精彩留言会获得点赞!