一种极限高温环境下光学测量技术误差控制系统与方法与流程
本发明属于数字图像处理,涉及一种极限高温环境下光学测量技术误差控制系统与方法,适用于极限高温环境下的图像采集、图像质量评价与图像校正。
背景技术:
1、随着航空航天与军事科学技术的发展,针对于超高速飞行、近太阳轨道卫星探测等新任务的新挑战,需要对极限高温环境下的航天器产品力学性能进行检测分析,为应用在极限环境下的典型航天器产品设计、生产与改进提供有效支持。极限环境下传统的接触式检测方法需要传感器与产品处于相同环境,传感器设计与实现存在测不准、费用高、风险大的局限。作为非接触式测量方法,数字图像相关技术已经在航空航天领域取得广泛应用,具有非接触、高精度、光路结构稳定、适用范围广的技术优势;但是,数字图像相关作为一项光学测量技术,在极限高温环境下受到环境杂光、随机扰动热气流、测试环境振动等因素干扰,往往出现测不准、不可测的问题,为后续机构结构产品基于检测结果进行的性能评估带来误差与不确定性。
技术实现思路
1、本发明解决的技术问题是:针对当前基于数字散斑检测技术进行极限高温环境下检测存在环境扰动引起的图像数据难获取、测量误差难消除的难题,提出一种极限高温环境下光学测量技术误差控制系统与方法,适用于实现极限高温环境下试验件表面处置、图像数据采集与质量评价以及误差抑制与控制,充分保证了图像数据的精确采集,为实现基于数字图像的机构结构极限环境性能检测提供支持。
2、本发明解决技术的方案是:第一方面,提出一种极限高温环境下光学测量技术误差控制系统,包括自适应激光增强模块、极限高温环境模拟装置、图像采集模块、数据解算评价与校正模块,
3、自适应激光增强模块,用于完成对试验件表面进行主动光照增强和滤波处理;其中,试验件表面制作有散斑场;
4、极限高温环境模拟装置,用于建立极限高温环境,提供试验件的安装接口以及试验件的观察窗口;
5、图像采集模块,用于在每个温度条件下,采集经过主动光照增强与滤波处理后不同时间的多张试验件表面状态图像数据,并将图像数据传输到数据解算评价与校正模块;
6、数据解算评价与校正模块,接收试验件表面状态图像数据,通过对同等温度条件下采集到的每组图像数据进行相对位移计算,建立温度-时间-图像-相对位移相联合的数据序列,作为后续基于散斑图像解算热变形时的误差修正量表。
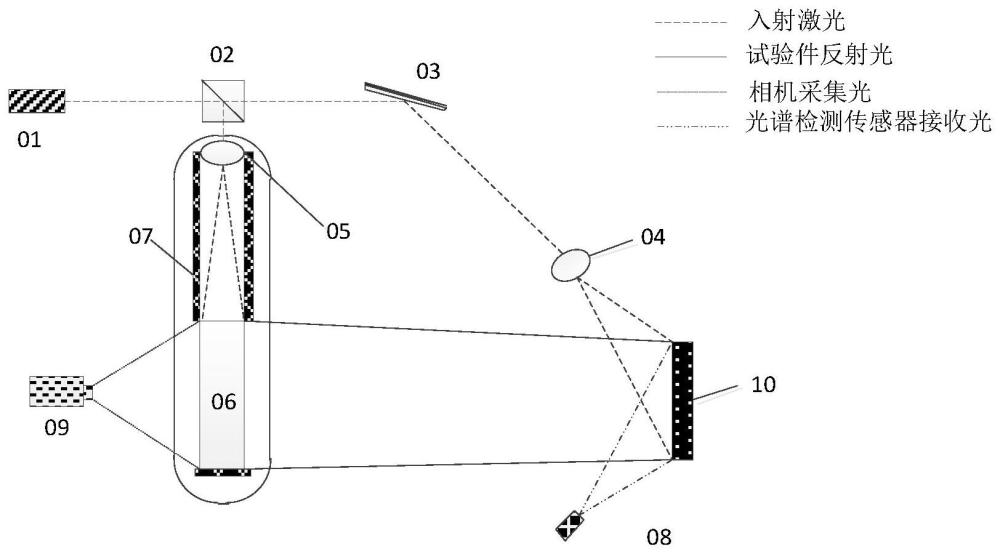
7、进一步的,所述自适应激光增强模块包括多波段光源发射器、第一分束器、封闭管路、透光玻璃、半分半透棱镜、反光镜、第二分束器、光谱检测传感器;
8、多波段光源发射器根据光谱检测传感器所采集到的试验件所处环境光谱分布进行特定波长或功率的激光发射,为进行高温环境下主动光照加强提供入射光源;
9、多波段光源发射器发射的激光经过半分半透棱镜分为两路,其中一路经过第一分束器扩束后途经封闭管路穿透照射透光玻璃,使透光玻璃呈现与多波段光源发射器同波长的可见光的颜色,实现自适应滤光功能玻璃构建;另外一路照射到反光镜上,通过调整反光镜的角度位置,使得经反光镜反射后的激光穿过极限高温环境模拟装置开设的观察窗口并垂直照射到试验件表面,试验件表面反射的激光进入具有滤光功能的透光玻璃,实现特定波长通过、其余波长滤除。
10、进一步的,极限高温环境模拟装置包括电加热器、支撑约束结构、均热风扇;电加热器用于模拟常温至2000k的极限温度环境,支撑约束结构作为试验件的安装接口,用于试验件的固定及姿态调整;均热风扇通过在极限高温环境模拟装置内自下至上的匀速送风,实现环境温度均匀化,并在采集图像时受控短时关闭。
11、进一步的,所述数据解算评价与校正模块,具体执行:
12、首先,数据解算评价与校正模块以同等温度条下采集得到的一组图像中的第一张图像为参考图,以其余图像为待校正图,进行参考图与待校正图的相关计算,得到待校正图中所有散斑点在参考图中的匹配点,进而根据匹配点求解待校正图相对于参考图的位移差值,并以位移差值为抖动评价指标筛选剔除异常图像数据;
13、其次,以筛选后的图像数据与参考图按照逐对散斑点的位移差值建立三维位移数据矩阵,三维位移数据矩阵进一步与温度、时间联合,作为后续基于散斑图像解算热变形时的误差修正量表。
14、第二方面,提出一种极限高温环境下光学测量技术误差控制方法,包括以下步骤:
15、步骤1、安装调试自适应激光增强模块、极限高温环境模拟装置、图像采集模块、数据解算评价与校正模块,其中,图像采集模块选用相机;
16、步骤2、对试验件表面进行散斑场制备,将试验件预装至支撑约束结构中,对预装的试验件进行散斑场图像采集,判断散斑场全局分布是否满足要求,若散斑场全局分布不满足要求,重新进行试验件表面散斑场制备,否则,判断散斑场离散分布是否满足要求,若散斑场离散分布满足要求,调整试验件姿态,当试验件表面被激光经观察窗口垂直照射时紧固支撑约束结构,否则,在不满足离散分布要求的位置补充喷涂散斑;
17、步骤3、试验件姿态固定后,转动反光镜并调节激光光强,确保激光可以垂直照射至试验件表面,调节相机光圈与焦距,并在调节过程中利用相机透过透光玻璃与观察窗口观测放置在极限高温环境模拟装置中的标定板,完成相机标定;
18、步骤4、在常温环境下进行初始图像采集,按照预设温度范围与温度台阶,对试验件进行逐台阶步进加温,采集每个温度台阶下不同时间的多张图像数据,以初始图像和不同温度台阶下的多张图像数据的集合作为图像序列;
19、步骤5、数据解算评价与校正模块接受图像序列,对每个温度台阶下的一组图像数据进行基于相关计算的散斑点相对位移确定,以散斑点相对位移作为图像抖动评价指标,对异常采集的图像数据进行剔除,根据符合质量要求的同组图像中全部散斑点的相对位移数值,建立三维位移修正矩阵,三维位移修正矩阵进一步与温度、时间建立误差修正量表,最后将符合质量要求的散斑图像按照温度、时间序列存储。
20、进一步的,步骤2所述对试验件表面进行散斑场制备,包括:
21、选用平均直径小于等于相机的最小像素尺寸的钴粉,利用耐高温白漆与钴粉按照体积比7:3的形式混合后搅拌均匀,利用气压喷壶盛装混合散斑涂料,按照横向逐行首尾衔接的s形的路径对试件表面进行喷涂,直到待喷涂试验件表面全部喷涂完毕;喷涂过程中每完成一行区域进行水平放置与静置固化,两行喷涂区域之间重叠区域控制在单行喷涂区域的1/10以下。
22、进一步的,所述判断散斑场全局分布是否满足要求,包括:
23、首先,对试验件表面散斑场进行图像数据采集,针对散斑场中钴粉与耐高温白漆在图像中表征为纯黑、纯白,对散斑场图像数据进行二值化计算,将像素值低于判别阈值的像素点判别为黑色,将像素值不低于判别阈值的像素点判别为白色,将试验件表面散斑场灰度图像转化为二值图像:
24、
25、其中,b(x,y)表示二值化之后图像中各像素点像素值,i(x,y)为图像采集模块采集到的试验件表面散斑场原始图像中各像素点像素值,x、y分别表示图像坐标系中每个像素点的横纵坐标,m、n分别为图像尺寸长、宽,theta为进行二值计算时的判别阈值,theta一般取值为255;
26、其次,计算二值图像的m×n个像素点中,像素值为0的像素点数目dsum、占比rato,以rato不低于2/3为合格标准,对于rato低于2/3的试验件表面散斑场,进行重新喷涂与检测,直至rato不低于2/3。
27、进一步的,所述判断散斑场离散分布是否满足要求,包括:
28、首先,在二值图像中,以图像中心点为基准,作为扫察起点构造与图像长宽尺寸等比例的小窗,记小窗尺寸长为m、宽为n,统计小窗中像素值为0的像素点数目wsum以及比值wrato=wsum/dsum;
29、判断散斑集中程度:如果wrato不大于0.9,以横纵比例均为0.1的步进增加小窗尺寸,重新计算wrato;如果wrato大于0.9,按照m/m计算小窗尺寸占二值图像尺寸的比例srato,以srato为依据判断散斑离散程度:若srato大于0.9,判断为散斑离散程度合格,如果若srato小于0.9,判别为散斑离散程度不合格,对小窗外部区域对应的试验件表面进行散斑喷涂,重新计算srato,直至srato大于0.9。
30、进一步的,步骤4具体包括:
31、首先,在常温环境下进行初始图像采集:开启多波段光源发射器,完成相机标定,待成像稳定后拍摄不少于20张图像,作为初始图像组;
32、然后,进行不同温度台阶下的图像数据采集:升温至不同台阶温度时,关闭均热风扇,由光谱检测传感器对试验件表面光场分布进行检测,统计可见光范围内各波长光的强度,记录可检测的最小强度光的波长,控制多波段光源发射器发射特定波长与强度的可见光,待相机成像稳定后连续拍摄不少于20张图像,作为当前台阶温度图像组;其中,所述特定波长设置为接近最小强度光的波长,强度设置依据相机成像质量,在不产生过曝光的前提下选择尽可能大的光强。
33、进一步的,步骤5具体包括:
34、501、进行相关性计算:
35、
36、
37、
38、
39、
40、其中j、k分别表示相关计算中所对应的图像区域长宽,α、β分别表示相关计算时像素点的横纵坐标值,为相关性指标,此指标最大时的散斑点互为匹配结果,表示参考图,为本组第一张图像,表示待校正图;以待校正图中的一散斑点与参考图中的一散斑点进行相关性计算,在求解计算结果最大时,判定此两点为最优匹配点,以此类推计算同组待校正图中所有散斑点在参考图中的匹配点;
41、502、求解待校正图中各个散斑点相对于参考图中的匹配点在物理坐标系中的三维位移:
42、
43、其中,detxi,j、detyi,j、detzi,j表示三维位移差值,dexi,j、deyi,j、dezi,j表示待校正图中散斑点三维空间坐标,srcxi,j、srcyi,j、srczi,j表示参考图中匹配散斑点三维空间坐标;
44、503、求解全图中位移差值均值mean、最大差值max,以0.8[(max+mean)/2]为抖动判别阈值,对位移差值大于抖动判别阈值的散斑点进行剔除,同时剔除前10%位移差值的待校正图;
45、504、完成散斑点异常剔除与异常图像清洗后,建立如下三维位移修正矩阵,三维位移修正矩阵进一步与温度、时间建立误差修正量表;
46、
47、
48、505、将符合质量要求的散斑图像按照温度、时间序列存储。
49、本发明与现有技术相比的有益效果是:
50、(1)本发明提供了一种软硬件相结合的极限环境下光学测量技术误差控制方法,基于此方法可以有效解决极限高温环境下环境杂光、振动以及气流扰动等因素对光学测量的干扰,为后续基于图像数据进行的机构结构极限环境性能检测提供有效支持。
51、(2)本发明提供了一种基于可见光的自适应光照增强方法,实现了照明与滤光结构的一体化设计,实现了光路紧凑集成化的同时,可以有效消除杂光干扰,有效提高了极限环境下图像可检测性。
52、(3)本发明提出了一种极端高温下散斑场图像质量评价与校正方法,提高了试验过程中散斑图的可检测性,有效抑制了外界环境中振动以及热气流扰动对散斑图成像的噪声干扰。
- 还没有人留言评论。精彩留言会获得点赞!