信号源数量估计方法、装置、处理装置、雷达、及介质与流程
本公开涉及视线雷达探测,尤其涉及信号源数量估计方法、装置、处理装置、雷达、及介质。
背景技术:
1、4d雷达在自动驾驶中扮演着必不可缺的角色,与传统雷达不同的是,4d雷达具备测量俯仰角的能力,且角分辨率比传统雷达要高,在角分辨率足够的情况下,需要能够准确估算出总共有多少个同距同速但不同角度的目标,这就需要进行目标信源估计。即超分辨算法需要事先获取雷达准确的信源数信息。
2、当前已有的信源估计算法中,包括aic(信息论准则)、gde(修正盖氏圆半径法)等,aic准则和gde两种方法需要在高信噪比条件下才能有相对准确的估计概率,需要在多个帧的积累下工作,且在低信噪比下误差概率较大,同时在工程应用上,两者的计算量较大,占据的计算资源较多,使用具有很大的局限性。
技术实现思路
1、鉴于以上所述现有技术的缺点,本公开的目的在于提供信号源数量估计方法、装置、处理装置、雷达、及介质,解决相关技术中的问题。
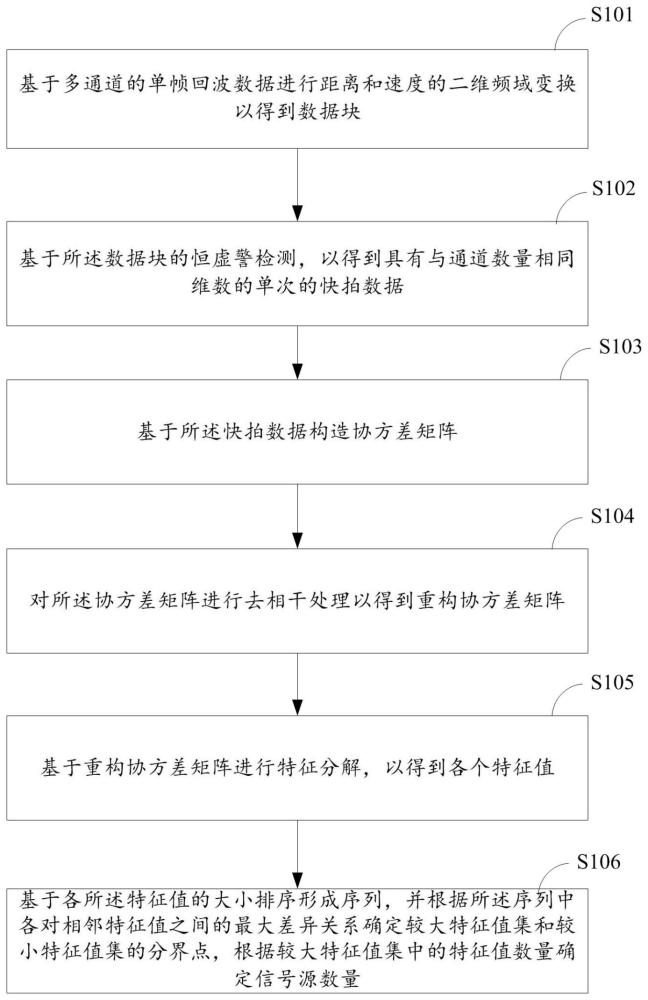
2、本公开第一方面提供一种信号源数量估计方法,应用于基于调频连续波进行探测的雷达;所述方法包括:基于多通道的单帧回波数据进行距离和速度的二维频域变换以得到数据块;其中,所述单帧回波数据基于每个通道的一组发射信号的回波信号所生成,所述数据块包括每个通道的二维频谱图;基于所述数据块的恒虚警检测,以得到具有与通道数量相同维数的单次的快拍数据;基于所述快拍数据构造协方差矩阵;对所述协方差矩阵进行去相干处理以得到重构协方差矩阵;基于重构协方差矩阵进行特征分解,以得到各个特征值;基于各所述特征值的大小排序形成序列,并根据所述序列中各对相邻特征值之间的最大差异关系确定较大特征值集和较小特征值集的分界点,根据较大特征值集中的特征值数量确定信号源数量。
3、在第一方面的实施例中,所述二维频域变换包括二维快速傅里叶变换;和/或,所述基于所述快拍数据构造协方差矩阵包括:基于所述快拍数据及其转置矩阵的乘积得到协方差矩阵。
4、在第一方面的实施例中,在所述基于所述数据块的恒虚警检测之前,包括:基于所述数据块进行非相干积累,并基于所述非相干积累的输出结果进行恒虚警检测,以得到所述快拍数据。
5、在第一方面的实施例中,所述对所述协方差矩阵进行去相干处理以得到重构协方差矩阵,包括:对所述协方差矩阵进行多次翻转,并对多次翻转后的矩阵求和以得到重构协方差矩阵。
6、在第一方面的实施例中,所述多次翻转包括:水平翻转和垂直翻转。
7、在第一方面的实施例中,所述基于各所述特征值的大小排序形成序列,并根据所述序列中各对相邻特征值之间的最大差异关系确定较大特征值集和较小特征值集的分界点,根据较大特征值集中的特征值数量确定信号源数量,包括:将各所述特征值从大至小排序,以得到所述序列;按所述序列顺序计算每对相邻特征值之间的比值,以确定分界点位于具有最大比值的两个相邻特征值之间,并将序列中分界点之前的特征值数量确定为所述信号源数量。
8、本公开第二方面提供一种信号源数量估计装置,应用于基于调频连续波进行探测的雷达;所述装置包括:信号处理模块,用于基于单帧回波数据进行二维频域变换以得到数据块;其中,所述单帧回波数据基于每个通道的一组发射信号的回波信号所生成,所述数据块包括每个通道的二维频谱图;目标检测模块,用于基于所述数据块的恒虚警检测,以得到具有与通道数量相同维数的单次的快拍数据;矩阵构造模块,用于基于所述快拍数据构造协方差矩阵;去相干处理模块,用于对所述协方差矩阵进行去相干处理以得到重构协方差矩阵;特征分解模块,用于基于重构协方差矩阵进行特征分解,以得到各个特征值;排序比较模块,用于基于各所述特征值的大小排序形成序列,并根据所述序列中各对相邻特征值之间的最大差异关系确定较大特征值集和较小特征值集的分界点,根据较大特征值集中的特征值数量确定信号源数量。
9、本公开第三方面提供一种信号处理装置,包括:处理器及存储器;所述存储器存储有程序指令;所述处理器,用于运行所述程序指令,以执行如第一方面中任一项所述的信号源数量估计方法。
10、本公开第四方面提供一种计算机可读存储介质,存储有程序指令,所述程序指令被运行以执行如第一方面中任一项所述的信号源数量估计方法。
11、本公开第五方面提供一种基于调频连续波进行探测的雷达,包括:收发天线阵列,被配置成等效的虚拟收发阵列,所述虚拟收发阵列包括:至少一个发射阵元、及其通道连接的多个接收阵元;如第三方面所述的信号处理装置,耦接所述收发天线阵列。
12、如上所述,本公开实施例中提供信号源数量估计方法、装置、处理装置、雷达、及介质,方法包括:基于单帧回波数据进行二维频域变换以得到数据块;其中,所述单帧回波数据基于每个通道的一组发射信号的回波信号所生成,所述数据块包括每个通道的二维频谱图;基于所述数据块的恒虚警检测,以得到具有与通道数量相同维数的单次的快拍数据;基于所述快拍数据构造协方差矩阵;对所述协方差矩阵进行去相干处理以得到重构协方差矩阵;基于重构协方差矩阵进行特征分解,以得到各个特征值;基于各所述特征值的大小排序形成序列,并根据所述序列中各对相邻特征值之间的最大差异关系确定较大特征值集和较小特征值集的分界点,根据较大特征值集中的特征值数量确定信号源数量。能够在低信噪比下工作,只用单帧便能够具有很好地估计概率,具有很好的稳健性和鲁棒性,且计算量较低。
技术特征:
1.一种信号源数量估计方法,其特征在于,应用于基于调频连续波进行探测的雷达;所述方法包括:
2.根据权利要求1所述的信号源数量估计方法,其特征在于,所述二维频域变换包括二维快速傅里叶变换;和/或,所述基于所述快拍数据构造协方差矩阵包括:基于所述快拍数据及其转置矩阵的乘积得到协方差矩阵。
3.根据权利要求1所述的信号源数量估计方法,其特征在于,在所述基于所述数据块的恒虚警检测之前,包括:
4.根据权利要求1所述的信号源数量估计方法,其特征在于,所述对所述协方差矩阵进行去相干处理以得到重构协方差矩阵,包括:
5.根据权利要求4所述的信号源数量估计方法,其特征在于,所述多次翻转包括:水平翻转和垂直翻转。
6.根据权利要求1所述的信号源数量估计方法,其特征在于,所述基于各所述特征值的大小排序形成序列,并根据所述序列中各对相邻特征值之间的最大差异关系确定较大特征值集和较小特征值集的分界点,根据较大特征值集中的特征值数量确定信号源数量,包括:
7.一种信号源数量估计装置,其特征在于,应用于基于调频连续波进行探测的雷达;所述装置包括:
8.一种信号处理装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,存储有程序指令,所述程序指令被运行以执行如权利要求1至6中任一项所述的信号源数量估计方法。
10.一种基于调频连续波进行探测的雷达,其特征在于,包括:
技术总结
本公开实施例中提供信号源数量估计方法、装置、处理装置、雷达、及介质,方法包括:基于单帧回波数据进行二维频域变换以得到数据块;其中,单帧回波数据基于每个通道的一组发射信号的回波信号所生成,数据块包括每个通道的二维频谱图;基于数据块的恒虚警检测,以得到具有与通道数量相同维数的快拍数据;基于快拍数据构造协方差矩阵;对协方差矩阵进行去相干处理;基于重构协方差矩阵进行特征分解,以得到通道数量个的特征值;基于各特征值的大小排序形成序列,并根据序列中各对相邻特征值之间的最大差异关系确定信号源数量。能够在低信噪比下工作,只用单帧便能够具有很好地估计概率,具有很好的稳健性和鲁棒性,且计算量较低。
技术研发人员:潘龙,尹术飞,王斌,杨军义,孙巍,齐明远
受保护的技术使用者:上海保隆汽车科技股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!