机电式陀螺的转子偏转位置检测系统及方法、机电式陀螺与流程
本发明涉及机电式陀螺,特别地,涉及一种机电式陀螺的转子偏转位置检测系统及方法,另外,还涉及一种采用上述系统的机电式陀螺。
背景技术:
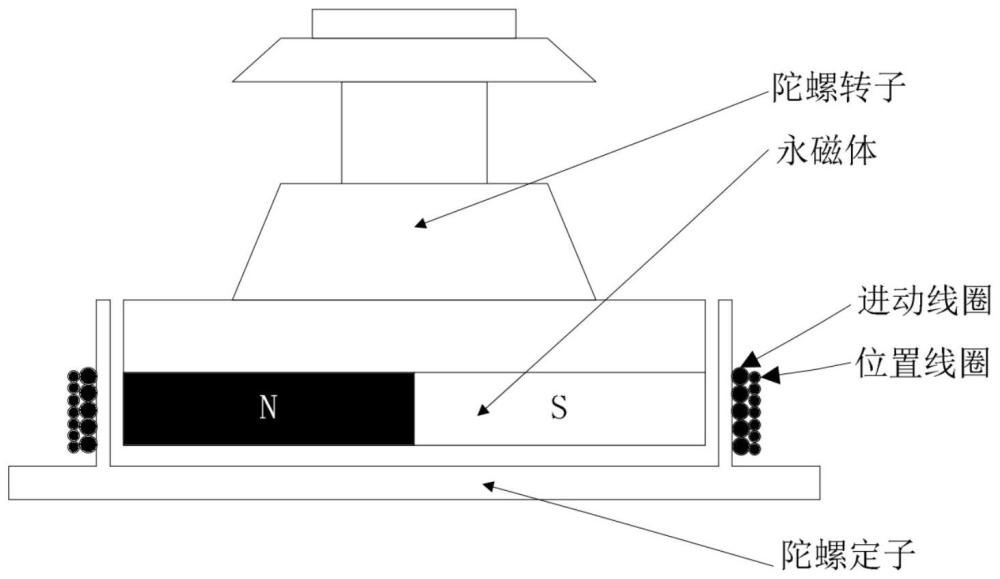
1、具有定轴性和进动性两种特性的机电式陀螺在航空、航天、航海领域发挥着重要作用,应用机电式陀螺时,一般将陀螺定子固定在随动平台内环上,陀螺转子则通过万向支架与定子连接,随动平台可做两自由度的角度偏转运动从而随动陀螺,陀螺转子、陀螺定子和随动平台共同组成一个动力陀螺稳定平台。高速自转的陀螺转子上可以安装光学系统和探测器等高精度测量仪表来探测感兴趣的目标,陀螺转子和随动平台之间的角度误差也可作为惯性导航系统的输入,用于控制陀螺稳定平台以及所在产品的姿态。为驱动陀螺转子起转并维持高速旋转,通常在陀螺转子内安装一个永磁体,在陀螺定子内安装多组旋转线圈,通过给旋转线圈通交流电并按照陀螺转子旋转位置进行电流换相,从而驱动永磁体带动陀螺转子高速旋转,基本原理类似于同步电机。并且,为使陀螺转子上的探测系统主动搜索和跟踪目标,机电式陀螺的驱动控制系统会给陀螺定子上的一组进动线圈通电,使陀螺的自转轴向指定方位偏转,即驱动陀螺进动。而当陀螺进动时,陀螺驱动控制系统需要快速、精准地测量陀螺转子的偏转角度位置,从而驱动随动平台跟随陀螺进动,消除陀螺转子轴和定子轴之间的角度误差,也可为惯性导航系统测量陀螺转子自转轴的指向方位提供输入参数。由于陀螺转子存在进动或者陀螺稳定平台的姿态改变而存在角度偏差,在电机转轴上安装光电编码器、霍尔开关或者旋转变压器检测电机位置并用于电机控制的传统方法则不再适用机电式转子陀螺,故而需要针对机电式陀螺转子的特性设计一种新的偏转位置检测技术。
技术实现思路
1、本发明提供了一种机电式陀螺的转子偏转位置检测系统及方法、机电式陀螺,以解决现有技术无法准确检测机电式陀螺的转子偏转位置的技术问题。
2、根据本发明的一个方面,提供一种机电式陀螺的转子偏转位置检测系统,包括:
3、位置线圈,绕制在进动线圈的外部且与进动线圈位于同一水平面,用于感应进动线圈的电流变化和陀螺转子偏转角度误差导致的磁通量变化,位置线圈的输出信号包括进动电流互感信号和陀螺位置误差感应信号;
4、信号调理电路,用于去除位置线圈输出信号中耦合的进动电流互感信号,仅输出陀螺位置误差感应信号;
5、位置检测传感器,分别沿随动平台的两个自由度运动方向安装在陀螺定子上,用于检测陀螺转子的旋转位置并输出两个自由度运动方向上的基准方波信号,其中,随动平台的两个自由度运动方向为直角坐标系的x、y方向;
6、信号处理器,用于根据两个基准方波信号的上升沿和下降沿对陀螺位置误差感应信号进行adc采样保持,并基于采样的信号值换算得到陀螺转子在一个旋转周期内向x、y两个方向的偏转角度。
7、进一步地,所述信号调理电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电容c1、电容c2、电容c3、运算放大器n1和运算放大器n2,电阻r1和电阻r2的第一端与进动线圈连接,以接入进动电流取样信号,电阻r2的第二端与电阻r3的第一端、电容c1的第一端连接,电阻r4的第一端与位置线圈连接,以接入位置线圈输出信号,第二端与电容c2的第一端连接,电容c1和电容c2的第二端均与运算放大器n1的反相输入端连接,电阻r5和电容c3的第一端均与运算放大器n1的反相输入端连接,电阻r5和电容c3的第二端均与运算放大器n1的输出端连接,运算放大器n1的输出端与电阻r6的第一端连接,电阻r6的第二端分别与电阻r7的第一端、运算放大器n2的反相输入端连接,电阻r1和电阻r3的第二端、运算放大器n1和运算放大器n2的同相输入端均接地,通过调整电阻r2、电阻r3、电阻r4、电容c1和电容c2的值,使得进动电流取样信号和位置线圈输出信号中耦合的进动电流互感信号在运算放大器n1的输出端相互抵消。
8、进一步地,电阻r2、电阻r3、电阻r4、电容c1和电容c2的值调整过程为:
9、在一个静止状态的陀螺样件上给进动线圈输入一路驱动信号,测量并记录位置线圈输出信号与进动电流取样信号之间的互感电压比k、位置线圈输出信号相比于进动电流取样信号的滞后相位然后调整电阻r4和电容c2的值,使位置线圈输出信号经放大滤波后在运算放大器n1输出端的相位延迟为180°、输出输入电压比为a,并调整电阻r2、电阻r3、电容c2的值,使进动电流取样信号经放大滤波后在运算放大器n1输出端的相位延迟为输出输入电压比为k×a。
10、进一步地,陀螺转子的外表面上设置位置反射环,位置反射环包括具有高反射系数的亮面和具有低反射系数的暗面,亮面和暗面的形状均为矩形,且亮面和暗面的分界线与陀螺转子永磁体的n极方向一致或者存在固定夹角,所述位置检测传感器为反射式光耦,两个反射式光耦间隔90°安装在陀螺定子上,且分别与随动平台的两个自由度运动方向一致,当陀螺转子旋转一周时,所述反射式光耦通过检测位置反射环上亮面和暗面的变化,输出一个基准方波信号。
11、进一步地,当陀螺转子和陀螺定子之间的偏转角度为0°时,反射式光耦发射和反射光线的区域中心应落在位置反射环的中心点。
12、进一步地,沿x方向设置的位置检测传感器输出的基准方波信号为第一基准方波信号,沿y方向设置的位置检测传感器输出的基准方波信号为第二基准方波信号,所述信号处理器在第二基准信号的下降沿采样得到的陀螺位置误差感应信号值反映了陀螺转子向x轴正向偏转的角度,在第二基准信号的上升沿采样得到的陀螺位置误差感应信号值反映了陀螺转子向x轴负向偏转的角度,在第一基准信号的下降沿采样得到的陀螺位置误差感应信号值反映了陀螺转子向y轴正向偏转的角度,在第一基准信号的上升沿采样得到的陀螺位置误差感应信号值反映了陀螺转子向y轴负向偏转的角度,将反映向x轴正向偏转角度和向x轴负向偏转角度的两个信号值相减后除以二,再乘以转换系数,得到陀螺转子向x轴方向的偏转角度,将反映向y轴正向偏转角度和向y轴负向偏转角度的两个信号值相减后除以二,再乘以平均转换系数,得到陀螺转子向y轴方向的偏转角度。
13、进一步地,将随动平台锁定在零位不动,驱动陀螺转子跟踪目标,使陀螺转子自转轴始终指向目标方位,通过目标模拟器运动提供一个标准角度,使得目标相对于陀螺偏转中心点,从零位向x轴正向偏转标准角度,陀螺跟踪目标到位后,采样得到对应的陀螺位置误差感应信号值,并计算得到信号值与标准角度之间的转换系数,重复上述过程,分别将偏转方向变更为x轴负向、y轴正向和y轴负向,并分别计算得到信号值与标准角度之间的转换系数,再取四个转换系数的均值作为平均转换系数。
14、进一步地,所述进动线圈和位置线圈位于陀螺转子永磁体的磁环内或者磁环外。
15、另外,本发明还提供一种机电式陀螺的转子偏转位置检测方法,采用如上所述的转子偏转位置检测系统,包括以下内容:
16、在进动线圈的外部绕制一组位置线圈,且位置线圈与进动线圈位于同一水平面;
17、去除位置线圈输出信号中耦合的进动电流互感信号,仅输出陀螺位置误差感应信号;
18、分别沿随动平台的两个自由度运动方向在陀螺定子上安装位置检测传感器;
19、根据两个位置检测传感器输出的基准方波信号的上升沿和下降沿对陀螺位置误差感应信号进行adc采样保持,并基于采样的信号值换算得到陀螺转子在一个旋转周期内向x、y两个方向的偏转角度。
20、另外,本发明还提供一种机电式陀螺,采用如上所述的转子偏转位置检测系统。
21、本发明具有以下效果:
22、本发明的机电式陀螺的转子偏转位置检测系统,针对陀螺转子高速旋转和快速进动的运动特性,利用了陀螺转子内现成的永磁体,通过在进动线圈外增加一组位置线圈来感应陀螺转子偏转角度造成的磁场变化和进动线圈内的交流电流变化,再利用信号调理电路对位置线圈的输出信号进行处理,去除掉位置线圈输出信号中耦合的进动电流互感信号,仅输出陀螺位置误差感应信号,然后通过在陀螺定子上沿随动平台的两个自由度运动方向分别安装位置检测传感器来检测陀螺转子的旋转位置,以输出两个自由度方向上的基准方波信号,最后,根据两个基准方波信号的上升沿和下降沿对陀螺位置误差感应信号进行adc采样保持,即可基于采样的信号值换算得到陀螺转子在一个旋转周期内向x、y两个方向的偏转角度。本发明基于电磁感应原理,通过在进动线圈的外部再并行绕制一组位置线圈,利用位置线圈来感应陀螺转子内高速旋转的永磁体的空间姿态造成的轴向磁场变化,再取样进动线圈内的电流驱动信号,从位置线圈输出信号中去除进动电流的互感信号,提取得到只受永磁体磁环的空间姿态影响的陀螺位置误差感应信号后,根据陀螺旋转位置产生的基准信号对陀螺位置误差感应信号进行采样,从而得到陀螺转子在直角坐标系内向x、y两个方向偏转的角度,提供了一种高精度、强实时的陀螺转子偏转位置检测方案,为陀螺进动或者陀螺稳定平台的姿态改变提供输入参数,并且具有安装简单、成本低的优点。
23、另外,本发明的机电式陀螺的转子偏转位置检测方法、机电式陀螺转子同样具有上述优点。
24、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!