一种三轴运动平台垂直度测量装置及方法与流程
本发明属于机床加工精度,具体涉及一种三轴运动平台垂直度测量装置及方法。
背景技术:
1、大型立式加工机床行程长、跨度大,可以实现复杂曲面的数控加工,适合中大型零部件轮廓加工及制孔。然而,受长行程、大跨度、高负载因素作用,主要支撑部件容易磨损、横梁在重力作用下易变形,导致机床各部件之间的位置关系发生变化,严重影响加工精度。机床的垂直度误差一般比偏摆误差和俯仰误差大,且随运动轴行程的增加对空间定位误差影响也增大,是影响加工精度最严重的误差源之一。
2、以往大量文献都认为三轴运动平台的垂直度误差是与平动轴位置无关的静态量,传统的方法是通过大理石方尺等工具进行局部范围测量来评估整个行程的垂直度误差,这种局部测量和简化处理有助于提升误差检测速度和计算效率。而随着对运动精度要求的提高,目前大量研究表明,实际上三轴运动平台的垂直度是会随着运行过程中工作台与导轨的相对位置的变化而产生变化的,要获得更高的定位精度,则需要对平台的垂直度误差进行实时检测与补偿,才能满足日益提高的定位精度要求。
3、垂直度的测量是各项几何误差中较为重要的一部分,三轴运动平台的垂直度主要由三个平动轴引入,对于三个平动轴而言,其轴间误差即垂直度误差有三个:ξ xy、ξ xz和ξ yz。传统的垂直度测量方法是通过标准的直角尺与测微表,过程较繁琐且只能实现离线测量,其测量精度较低,而运用激光干涉技术可以突破实物量具的限制,实现全量程测量。目前激光干涉仪进行垂直度测量一般单独测量二维平面的轴间直线度误差,再利用光学角尺确定直线度误差间的关系,最终得到垂直度的测量结果。ξ xy、ξ xz和ξ yz需单独测量得到,操作上较为繁琐,且实现在线测量成本高。
技术实现思路
1、本发明的目的在于提供一种三轴运动平台垂直度测量装置及方法,能够低成本地实现三个平动轴的垂直度误差的同时测量。
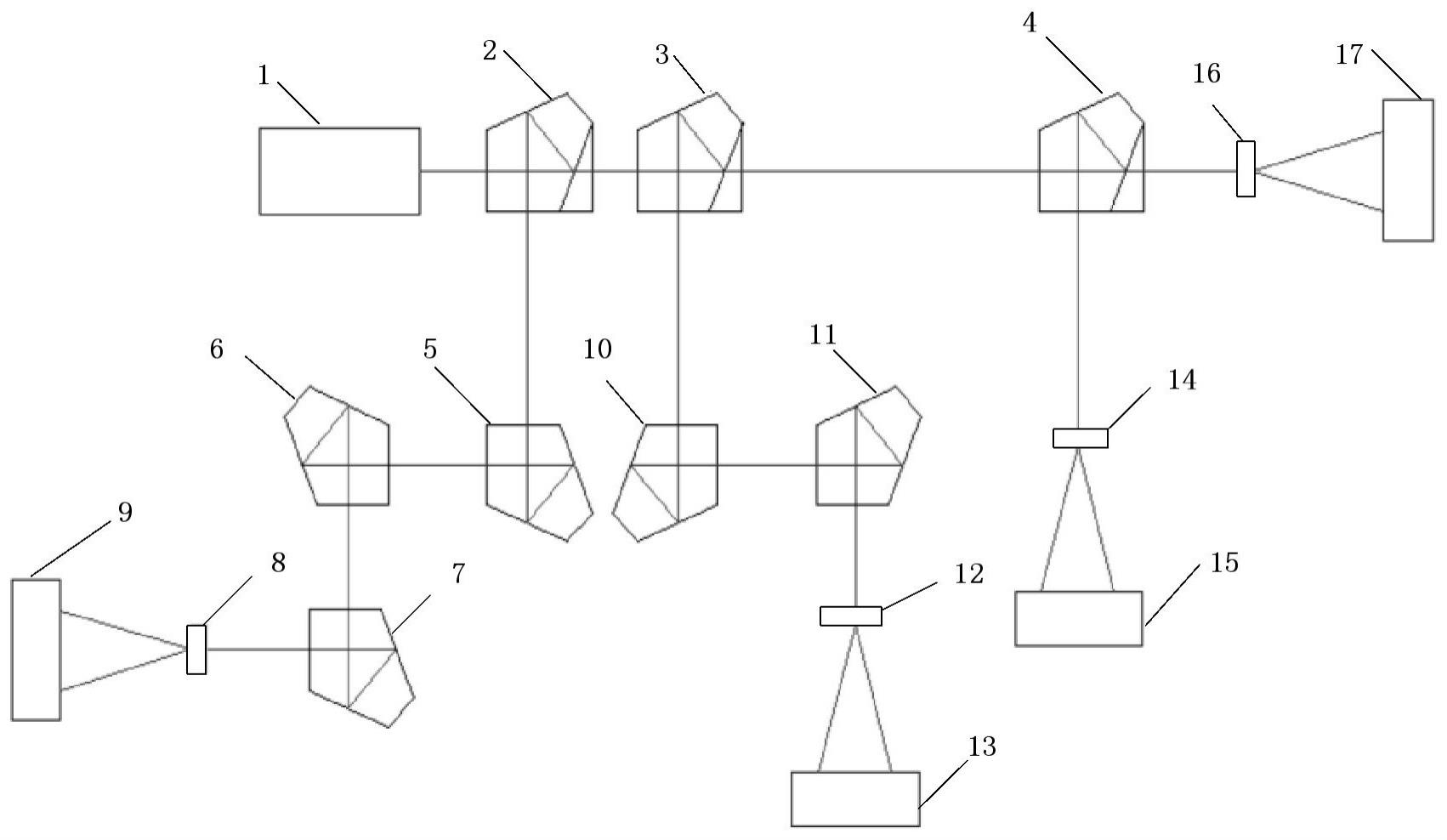
2、为了实现上述目的,本发明的一个方面提供一种三轴运动平台垂直度测量装置,所述三轴运动平台在 x向、 y向和 z向上分别具有 x向平动轴、 y向平动轴和 z向平动轴,所述装置包括:激光器、第1~第3五角分光棱镜、第1~第5五角棱镜、第1~第4直线度干涉镜、第1~第4直线度反射镜、第1~第4干涉信号接收器;
3、所述激光器用于发射激光束,所述激光器发射的激光束经过第1五角分光棱镜分为 x向的第1路光束和 y向的第2路光束,第1路光束依次经过第1~第3五角棱镜折射到第1直线度干涉镜并通过第1直线度反射镜将干涉信号返回到第1干涉信号接收器,通过第1干涉信号接收器获取干涉信息,以测量 z向平动轴 x向的直线度;
4、第2路光束经过第2五角分光棱镜分为 z向的第3路光束和 y向的第4路光束,第3路光束依次经过第4和第5五角棱镜折射到第2直线度干涉镜,并通过第2直线度反射镜将干涉信号返回到第2干涉信号接收器,通过第2干涉信号接收器获取干涉信息,以测量 z向平动轴 y向的直线度;
5、第4路光束经过第3五角分光棱镜分为 y向的第5路光束和 x向的第6路光束,其中第5路光束进入第3直线度干涉镜,并通过第3直线度反射镜将干涉信号返回到第3干涉信号接收器,通过第3干涉信号接收器获取干涉信息,以测量 y向平动轴的直线度,第6路光束进入第4直线度干涉镜,并通过第4直线度反射镜返回到第4干涉信号接收器,通过第4干涉信号接收器获取干涉信息,以测量 x向平动轴的直线度。
6、优选地,所述三轴运动平台包括基座和安装在基座上的 x向导轨、 y向导轨、 z向导轨,所述激光器安装在所述基座上,所述第1五角分光棱镜水平安装在所述基座上,所述第2五角分光棱镜竖直安装在所述基座上。
7、优选地,所述第3五角分光棱镜水平安装在 y向平动轴上,第3直线度干涉镜和第3干涉信号接收器安装在 y向平动轴上,第3直线度反射镜安装在 y向导轨的末端;
8、所述第4直线度干涉镜和第4干涉信号接收器安装在 x向平动轴上,第4直线度反射镜安装在 x向导轨的末端。
9、优选地,所述第1~第3五角棱镜沿 x向竖直安装并互相垂直,第1直线度干涉镜和第1干涉信号接收器固定在 z向导轨的末端,第1直线度反射镜安装于 z向平动轴上;
10、所述第4和第5五角棱镜沿 y向竖直安装并互相垂直,第2直线度干涉镜和第2干涉信号接收器固定在 z向导轨的末端,第2直线度反射镜安装于 z向平动轴上。
11、本发明的另一个方面提供一种三轴运动平台垂直度测量方法,利用上述的装置测量三轴间的垂直度误差,所述方法包括:
12、步骤s1:调整由第1五角分光棱镜分出的第1和第2路光束分别与 x向平动轴和 y向平动轴平行准直;
13、步骤s2:通过第1~第4直线度干涉镜、第1~第4直线度反射镜和第1~第4干涉信号接收器分别测量 z向平动轴 x向的直线度、 z向平动轴 y向的直线度、 y向平动轴的直线度和 x向平动轴的直线度,并分别拟合得到 x向平动轴光路的斜度 kx、y向平动轴光路的斜度 ky、 z向平动轴 x向光路的斜度 kz1、 z向平动轴 y向光路的斜度 kz2;
14、步骤s3:如下计算三轴间的垂直度误差:
15、ξ xy= θ3-( ky-kx);ξ xz=( θ4+ θ5+ θ6)- kz1;ξ yz=( θ2+ θ7+ θ8)- kz2,
16、其中,ξ xy为 x向平动轴与 y向平动轴间的垂直度误差,ξ xz为 x向平动轴与 z向平动轴间的垂直度误差,ξ yz为 y向平动轴与 z向平动轴间的垂直度误差, θ3为第3五角分光棱镜的误差, θ4、 θ5、 θ6分别为第1~第3五角棱镜的误差, θ2、 θ7、 θ8分别为第2五角分光棱镜、第4五角棱镜和第5五角棱镜的误差。
17、根据本发明的上述方面的三轴运动平台垂直度测量装置及方法,能够低成本地实现三个平动轴的垂直度误差的同时测量。
- 还没有人留言评论。精彩留言会获得点赞!