基于独立自准直仪测量的空心角锥镜直角误差标定方法
本发明属于光学测量仪器领域,具体是基于独立自准直仪测量的空心角锥镜直角误差标定方法。
背景技术:
1、角锥棱镜具有使反射光线沿入射方向平行传输的光学特性,被作为反射器广泛应用于导弹、人造卫星和月球等激光测距领域。早在20世纪60年代,月球激光测距就已经通过地面台站向月球表面的角锥棱镜发射脉冲激光,来精确测量激光脉冲往返时间测定地月距离,然而,月面上的反射器经半个多世纪的使用,其反射性能已退化需要替换,在新方案中,由于空心角锥棱镜与实体角锥棱镜相比,具有光学性能不依赖于玻璃材料的不均匀度、以及更大的通光口径等优势,在新一代月球激光测距技术中受到重视。
2、但在实际生产中,空心角锥棱镜各反射面间的直角误差会破坏反射与入射光束的平行特性,导致光束被反射面切割为具有相互角度偏差的六个组成部分,从而影响地面台站所接收到的光能强度,并伴随反射体与接收器的相互远离,将最终导致无法实现对反射光束的探测。因此,空心角锥棱镜三个反射面间的直角误差需要严格测量和校准。之前,棱镜生产商常用接触测量技术来标定两个面间的直角误差,但测量过程中,极易破坏棱镜的表面镀膜层,正逐步被基于光学测量原理的非接触测量方法所替代,例如,chatterjee(文献s.chatterjee and y.p.kumar,"external measurement of dihedral right angleswith cyclic optical configuration,"appl.opt.48(8),1598-1605(2009).)等报道了一种基于菲佐干涉仪(fizeau interferometer)结构的循环光学设计,通过将棱镜的两个外表面分别考虑为参考和测量光路的反射元件,实现其相互角度的测量。2019年何(文献y.he,q.liu,j.j.he,et al.,"external right-angle measurement using a two-acsystem,"appl.opt.58(4),1158-1163(2019).)等提出了一种利用两台自准直仪相互正交的结构并结合数学模型,对棱镜两个反射面进行垂直度测量的方法。2021年shimizu(文献y.shimizu,x.ma,h.matsukuma,et al.,"a technique for measurement of a prismapex angle by optical angle sensors with a reference artefact,"meas.sci.technol.32,054007(2021).)等采用一对光学角度传感器分别测量目标棱镜和参考棱镜上的采样点,完成对棱镜两个工作面间的角度标定。但上述方法存在一个共性缺点,不能一次性实现三个反射面间的直角误差测量,而逐次标定过程中的误差叠加则将严重影响最终的测量精度。
3、在本文中,公布了一种基于“空间坐标矢量分析法”建立空心角锥镜的非直角误差与反射光束角度偏移量的数学联系,并利用自准直仪可精准测量反射光束角偏量的这一特性,提出了对空心角锥镜三个直角误差的一次性测量方法。
4、cn115406379a,一种基于光斑形变的大量程自准直测角方法,属于光学测量仪器领域,其步骤包括:①基于标准角锥镜的正交结构,运用空间坐标向量解析方法,结合欧拉空间旋转关系公式,指导角锥镜的反射平面向柱形面的定向结构重建,从而设计一种对俯仰角和偏航角具有角度感知的空心柱面角锥镜;②使用空心柱面角锥镜作为自准直测量系统的反射体,构建用于测量俯仰角和偏航角的自准直仪测量系统;③建立该角锥镜与测量系统之间的双坐标系统模型,通过对反射光束的矢量信息分析,推导反射成像光斑的形变规律与该反射体角度变化的数学解算公式。本发明提高了自准直测角方法的量程,同时还提高了精度和动态测量距离性能。
5、上述检索文件是利用空间坐标矢量分析法建立角锥镜平面向柱形面异化过程中,所引发的反射光束矢量信息与柱形面结构之间的相互关系,结合自准直仪的测量结构,获取柱面角锥镜空间姿态角度变化信息,而本发明不是用于柱面角锥镜的空间姿态角度测量,更不是用于空心柱面角锥镜的特殊结构分析。本专利是基于标准平面角锥镜固定姿态角度下,对角锥镜三面直角误差的测量。两篇专利的相同之处在于利用空间坐标矢量方法进行数学推导,但本专利并未对该矢量分析法进行创新,而是利用该方法对空心角锥镜的直角误差测量进行数学推导。因此对比来看,虽然两篇专利都利用了空间坐标矢量分析法,但是推导的结果和应用都有较大的区别。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种基于独立自准直仪测量的空心角锥镜直角误差标定方法。本发明的技术方案如下:
2、一种基于独立自准直仪测量的空心角锥镜直角误差标定方法,其包括以下步骤:
3、步骤1、通过预设空心角锥镜三个反面的旋转过程,建立镜体的反射矩阵与三面直角误差的数学联系;步骤2、利用空间矢量算法,推导准直反射光束的空间矢量信息与反射体的矩阵形式间的相互关系;步骤3、融合自准直仪和空心角锥镜的双坐标模型,建立三个反射面间的直角误差与对应反射光束矢量变化的数学联系;步骤4、形成基于独立自准直仪成像信息的空心角锥镜直角误差测量公式。
4、进一步的,所述步骤1具体包括:
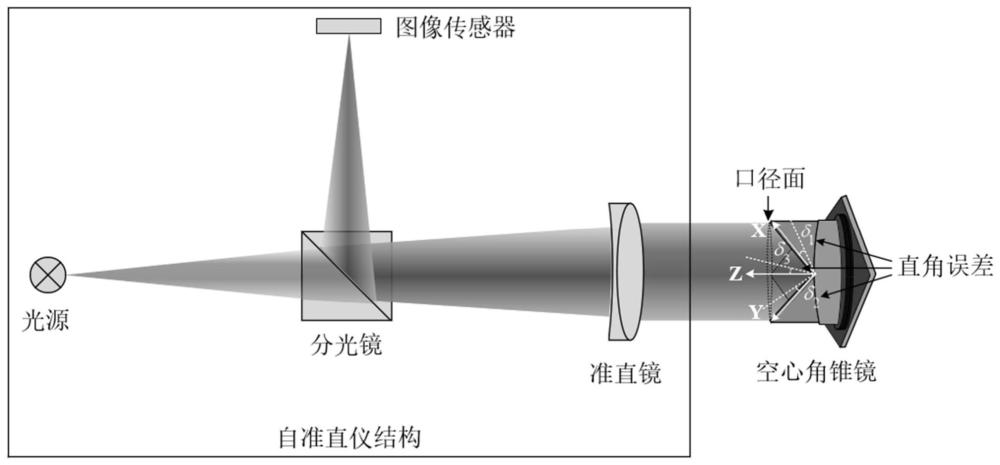
5、基于空心角锥镜建立自身坐标系zoy、xoz、xoy平面,分别将空心角锥镜的反射面2和3的直角误差标注为δ2,反射面1和2的直角误差标注为δ1,反射面1和3的直角误差标注为δ3,得到三个反射面间的直角误差与旋转模型的角度参量之间的近似关系为:
6、δ2=δ23,δ3=δ13,δ1=δ12-δ2·δ3 (1)
7、根据空心角锥镜三个反射面的法向量的不同,得到三个反射面的反射矩阵m1、m2和m3根据反射定律可以表示为:
8、
9、
10、
11、理想空心角锥镜具有三个反射面,当准直光束入射镜体内部时,将被三个反射面均分为六束光,因此,光束入射镜体内部按照不同的反射面顺序具有六种不同表达形式的反射矩阵mp,反射面顺序为1-2-3的反射矩阵为mp123:
12、mp123=m1·m2·m3 (5)。
13、进一步的,所述步骤2具体包括:
14、假设空心角锥镜的入射光束为准直光束,并垂直入射进空心角锥镜的孔径面,则入射光束矢量结合公式(5),计算出受角锥镜直角误差影响后的出射光束矢量,反射面顺序为1-2-3,2-1-3,2-3-1的反射光束在xyz坐标系中的矢量表达式为:
15、b123=mp123·a=(a1 b1 c1)t (6)
16、b213=mp213·a=(a2 b2 c2)t (7)
17、b231=mp231·a=(a3 b3 c3)t (8)
18、mp123、mp213、mp231分别代表反射面顺序为1-2-3、2-1-3、2-3-1的反射矩阵。
19、其中,反射光束矩阵中的元素ai、bi、ci(i=1、2、3)分别表示为:
20、
21、
22、
23、
24、
25、
26、
27、
28、
29、进一步的,所述步骤3具体包括:
30、在自准直仪坐标系x0y0z0中考虑反射光束的矢量表达式,需要将坐标系xyz中的反射光束矢量b转换为坐标系x0y0z0中的矢量b':
31、b'=r·b=[0 0 -1]t,r=rrx·rry·rrz (18)
32、其中,rrx、rry、rrz分别为x、y、z轴向x0、y0、z0轴进行参量转化的矩阵表达式;
33、结合公式(6)-(17),并考虑公式(1)角度δ1、δ2、δ3的近似关系,则可获得在自准直仪坐标系x0y0z0下经空心角锥镜1-2-3、2-1-3和2-3-1反射面顺序的反射光束矢量表达式:
34、
35、
36、
37、反射光束3-2-1、3-1-2和1-3-2的光束矢量矩阵分别与公式(19)、(20)、(21)中元素具有相反的符号。
38、进一步的,所述步骤4具体包括:将光束矢量变化和自准直仪焦距f结合,获得不同反射顺序下的反射光束成像位移与空心角锥镜三个直角误差间的关系表达式:
39、
40、
41、
42、
43、
44、
45、因此,空心角锥镜三个直角误差δ1、δ2和δ3,可通过自准直仪中的图像传感器检测出,其检测公式为:
46、
47、
48、
49、一种电子设备,其包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如任一项所述基于独立自准直仪测量的空心角锥镜直角误差标定方法。
50、一种非暂态计算机可读存储介质,其上存储有计算机程序,其所述计算机程序被处理器执行时实现如任一项所述基于独立自准直仪测量的空心角锥镜直角误差标定方法。
51、一种计算机程序产品,包括计算机程序,其所述计算机程序被处理器执行时实现如任一项所述基于独立自准直仪测量的空心角锥镜直角误差标定方法。本发明的优点及有益效果如下:
52、本发明提出了一种基于独立自准直仪一次性测量的空心角锥镜直角误差标定方法,该方法可以规避当前角锥镜三个反射面直角误差测量工艺中,对每一误差进行逐次测量,从而造成多次测量过程的误差叠加,并且能够提高测量效率简化操作流程。本发明的测量精度只依赖于自准直仪光轴和角锥镜口径面的垂直度,误差源较少,易于规避,因此该方法有更高的测量精度依据。
- 还没有人留言评论。精彩留言会获得点赞!