多传感器联合标定方法及系统与流程
本发明涉及传感器标定,尤其涉及一种多传感器联合标定方法及系统。
背景技术:
1、现有应用在轨道交通上的感知系统主要包括工业相机和激光雷达,不同类型的传感器具有不同的特性和测量误差,而将它们的数据进行融合需要解决数据对齐和坐标系转换等问题。
2、目前轨道交通的多传感器标定过程在自动化程度上仍然相对较低,由于不同传感器类型和系统配置都可能存在差异,仍需要人工进行调整和配置,导致列车感知系统上的多传感器标定工作的效率和准确性较低。
3、因此,现在亟需一种多传感器联合标定方法及系统来解决上述问题。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种多传感器联合标定方法及系统。
2、本发明提供一种多传感器联合标定方法,包括:
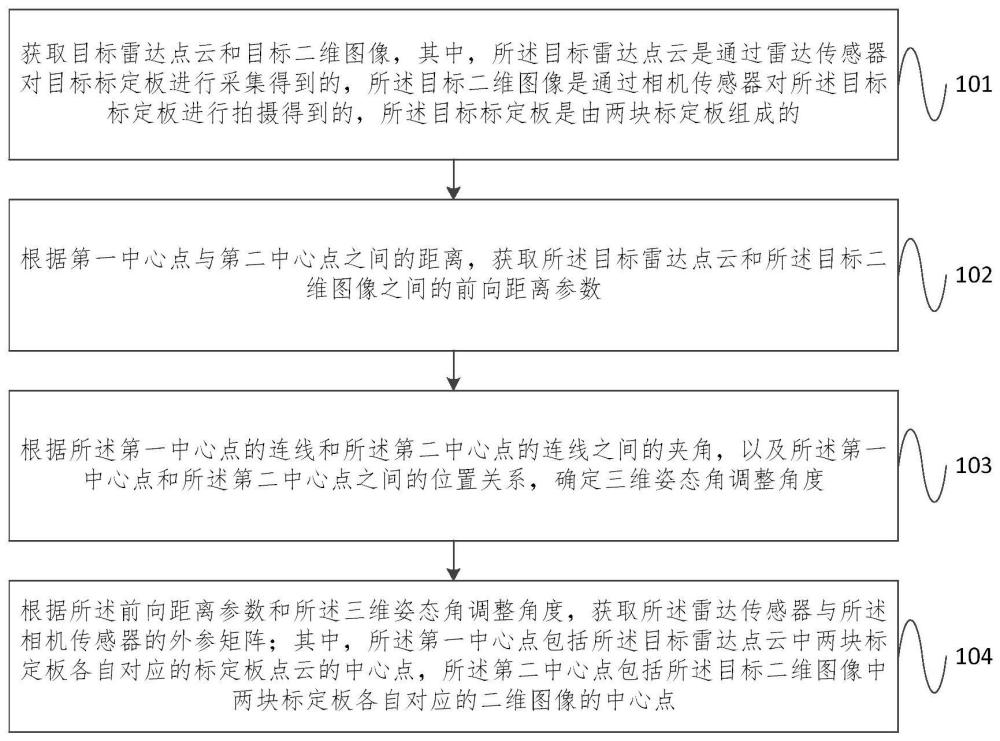
3、获取目标雷达点云和目标二维图像,其中,所述目标雷达点云是通过雷达传感器对目标标定板进行采集得到的,所述目标二维图像是通过相机传感器对所述目标标定板进行拍摄得到的,所述目标标定板是由两块标定板组成的;
4、根据第一中心点与第二中心点之间的距离,获取所述目标雷达点云和所述目标二维图像之间的前向距离参数;
5、根据所述第一中心点的连线和所述第二中心点的连线之间的夹角,以及所述第一中心点和所述第二中心点之间的位置关系,确定三维姿态角调整角度;
6、根据所述前向距离参数和所述三维姿态角调整角度,获取所述雷达传感器与所述相机传感器的外参矩阵;
7、其中,所述第一中心点包括所述目标雷达点云中两块标定板各自对应的标定板点云的中心点,所述第二中心点包括所述目标二维图像中两块标定板各自对应的二维图像的中心点。
8、根据本发明提供的一种多传感器联合标定方法,所述根据第一中心点与第二中心点之间的距离,获取所述目标雷达点云和所述目标二维图像之间的前向距离参数,包括:
9、根据所述目标标定板中预先确定的关键点坐标信息,计算所述目标雷达点云和所述目标二维图像中各自对应的中心点坐标信息,得到所述第一中心点和所述第二中心点;
10、根据所述目标雷达点云和所述目标二维图像中各自对应的中心点坐标信息,计算得到第一欧氏距离和第二欧式距离,其中,所述第一欧氏距离为所述目标雷达点云中两个中心点之间的欧氏距离,所述第二欧氏距离为所述目标二维图像中两个中心点之间的欧氏距离;
11、判断所述第一欧氏距离和所述第二欧式距离之间的前向距离差是否大于预设距离阈值,若大于所述预设距离阈值,则根据所述前向距离差,获取所述目标雷达点云和所述目标二维图像之间的前向距离参数。
12、根据本发明提供的一种多传感器联合标定方法,所述根据所述第一中心点的连线和所述第二中心点的连线之间的夹角,以及所述第一中心点和所述第二中心点之间的位置关系,确定三维姿态角调整角度,包括:
13、判断所述第一中心点的连线和所述第二中心点的连线之间的夹角是否大于预设姿态角阈值,若大于所述预设姿态角阈值,根据所述夹角与所述预设姿态角阈值,确定滚转角调整值;
14、基于所述中心点坐标信息,判断所述第一中心点与所述第二中心点之间的高度距离差是否大于预设高度距离差阈值,若大于所述预设高度距离差阈值,根据所述高度距离差与所述预设高度距离差阈值,确定俯仰角调整值;
15、判断所述第一中心点与所述第二中心点之间的水平距离差是否大于预设水平距离差阈值,若大于所述预设水平距离差阈值,根据所述水平距离差与所述预设水平距离差阈值,确定偏航角调整值;
16、根据所述滚转角调整值、所述俯仰角调整值和所述偏航角调整值,获取所述三维姿态角调整角度。
17、根据本发明提供的一种多传感器联合标定方法,所述获取目标二维图像,包括:
18、通过所述相机传感器拍摄所述目标标定板,得到标定板图像;
19、根据所述标定板图像中各个轮廓的顶点数,获取所述标定板图像中的所有待检测轮廓,并根据每个所述待检测轮廓的宽高比信息,确定所述标定板图像中的目标轮廓;
20、获取所述目标轮廓中的顶点像素坐标信息,并基于所述目标轮廓在所述标定板图像中绘制对应的轮廓线,得到所述目标二维图像。
21、根据本发明提供的一种多传感器联合标定方法,所述根据所述目标标定板中预先确定的关键点坐标信息,计算所述目标二维图像中对应的中心点坐标信息,包括:
22、基于opencv,根据所述相机传感器拍摄得到的多张标定板图像,获取所述相机传感器的投影矩阵,所述投影矩阵包括所述相机传感器的内参矩阵和外参矩阵,所述多张标定板图像对应的标定板已标记有关键点;
23、根据所述投影矩阵和所述关键点坐标信息,确定所述目标二维图像中的关键点像素坐标信息,并根据所述关键点像素坐标信息,获取所述目标二维图像中对应的中心点坐标信息。
24、根据本发明提供的一种多传感器联合标定方法,在所述基于opencv,根据所述相机传感器拍摄得到的多张标定板图像,获取所述相机传感器的投影矩阵之后,所述方法还包括:
25、通过反投影误差,对所述投影矩阵进行评估,若评估结果不满足预设条件,则重新对所述相机传感器的投影矩阵进行标定。
26、根据本发明提供的一种多传感器联合标定方法,所述获取目标雷达点云,包括:
27、将所述雷达传感器采集到的每个点云数据的反射率值与预设反射率阈值进行对比,将所述反射率值小于所述预设反射率阈值的点云数据进行过滤,得到所述目标雷达点云。
28、本发明还提供一种多传感器联合标定系统,包括:
29、传感器数据采集模块,用于获取目标雷达点云和目标二维图像,其中,所述目标雷达点云是通过雷达传感器对目标标定板进行采集得到的,所述目标二维图像是通过相机传感器对所述目标标定板进行拍摄得到的,所述目标标定板是由两块标定板组成的;
30、第一处理模块,用于根据第一中心点与第二中心点之间的距离,获取所述目标雷达点云和所述目标二维图像之间的前向距离参数;
31、第二处理模块,用于根据所述第一中心点的连线和所述第二中心点的连线之间的夹角,以及所述第一中心点和所述第二中心点之间的位置关系,确定三维姿态角调整角度;
32、联合标定模块,用于根据所述前向距离参数和所述三维姿态角调整角度,获取所述雷达传感器与所述相机传感器的外参矩阵;
33、其中,所述第一中心点包括所述目标雷达点云中两块标定板各自对应的标定板点云的中心点,所述第二中心点包括所述目标二维图像中两块标定板各自对应的二维图像的中心点。
34、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述多传感器联合标定方法。
35、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述多传感器联合标定方法。
36、本发明提供的多传感器联合标定方法及系统,通过雷达点云和二维图像各自对应的中心点之间的距离,确定雷达点云和二维图像之间的前向距离参数,并根据雷达点云和二维图像各自中心点的连线夹角以及位置关系,确定三维姿态角调整角度,从而自动完成多传感器的联合标定过程,相比现有依赖人工方式进行标定,提高了标定效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!