一种基于调制边频自适应提取的齿轮啮合状态可视化方法
本发明属于齿轮状态监测与故障诊断,具体涉及一种基于调制边频自适应提取的齿轮啮合状态可视化方法。
背景技术:
1、齿轮是机械设备中传递运动和动力的核心部件,通过轮齿间的相互啮合可实现增速、减速、变向以及换向等动作。由于具有传动精度高、功率范围广、结构紧凑、工作可靠等诸多优点,齿轮传动在机械制造、航空航天、工程建设、交通运输等重要领域获得了广泛应用。然而,受制造误差、安装误差以及恶劣工作环境的影响,齿轮在长时间服役后容易出现各种类型的故障,诱发异常振动。因此,准确监测和诊断齿轮的健康状态并为维护人员提供必要的决策信息对于保障设备整体运行的高效性、平稳性以及安全性具有重要的现实意义和工程应用价值。
2、振动信号是所有齿轮副啮合振动综合作用的结果,各啮合频率及其倍频成分的振动受到转轴旋转频率的调制作用,在频谱中表现为以啮合频率为中心并以转轴旋转频率为间隔的调制边频带。当齿轮由于齿面不断摩擦碰撞而出现断齿、点蚀、裂纹、磨损等各种类型的故障时,伴随着这些故障的产生和发展,轮齿间的啮合刚度和啮合力也会随之变化,导致振动信号中啮合频率及其倍频成分受到的调制作用逐步增强,产生调制能量增加,边频带谱线数量增加以及边频带形状改变等现象。因此,调制边频带蕴含了与轮齿啮合调制变化有关的重要特征信息,对调制边频进行精确提取和有效分析有助于掌握齿轮的啮合情况,进而判断齿轮的健康状态。
3、由于调制边频带是紧凑于啮合频率的窄带信号,常用的方法是构造合适的带通滤波器先对振动信号进行滤波,提取出啮合频率附近的窄带成分,然后实施包络分析获得包络谱,并根据包络谱中转频及其倍频处谱线的分布情况确定齿轮的健康状况。为解决传统的带通滤波器参数不易确定的问题,现有技术在包络分析中引入一些自适应分解方法来取代传统的带通滤波器以达到自适应提取调制边频带的目的,代表性的方法有经验模态分解(张海潮,吴伟蔚,郑霞君.基于经验模态分解法和hilbert谱的齿轮箱故障诊断[j].机床与液压,2007,35(12):174-176+187.)、局部均值分解(王鹏飞,胡建中.基于lmd的包络谱特征值在齿轮箱故障诊断中的应用研究[j].机电工程,2016,33(05):542-545+550.)、变分模态分解(丁承君,付晓阳,冯玉伯等.基于参数优化vmd的齿轮箱故障特征提取方法[j].机械传动,2020,44(03):171-176.)等。然而,无论是传统的带通滤波器还是上述提及的自适应分解方法,均无法消除调制边频带内的无关干扰,比如残留的背景噪声、与齿轮啮合不相关的其他调制成分等,从而容易造成误判或漏判。因此,亟需研发一种适用于齿轮啮合调制边频自适应精确提取且能消除带内干扰的新型滤波方法。
4、此外,调频信号和调幅信号可能具有相似的频谱结构,不同故障类型的齿轮振动信号也可能具有相似的包络谱谱线分布。因此,包络解调方法中单一的谱分析对部分潜在的、谱分布相似的齿轮故障类型难以进行有效区分。相比于简单的谱分析,空间信息重构技术可以将信号从时域转换到空间域,从视觉上能够形象直观地反映出更加丰富的细节信息,有助于提升不同故障类型信号之间的差异性。
5、迄今为止,针对齿轮啮合调制信号的自适应精确滤波以及结合空间信息重构技术的可视化方法还未见公开报道。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供一种基于调制边频自适应提取的齿轮啮合状态可视化方法,可以精确定位和提取啮合频率附近包含齿轮重要特征信息的调制边频成分,同时去除带内其他噪声的干扰;将提取出的时域特征信号以空间信息重构的方式映射到极坐标中,便于直观观察空间上每个轮齿的啮合状态;该方法能够将复杂的齿轮健康状态监测和诊断问题转化为简单且易于理解的图形识别问题,大大提升了振动数据的信息表达能力。
2、为了达到上述目的,本发明采取的技术方案是:
3、一种基于调制边频自适应提取的齿轮啮合状态可视化方法,包括以下步骤:
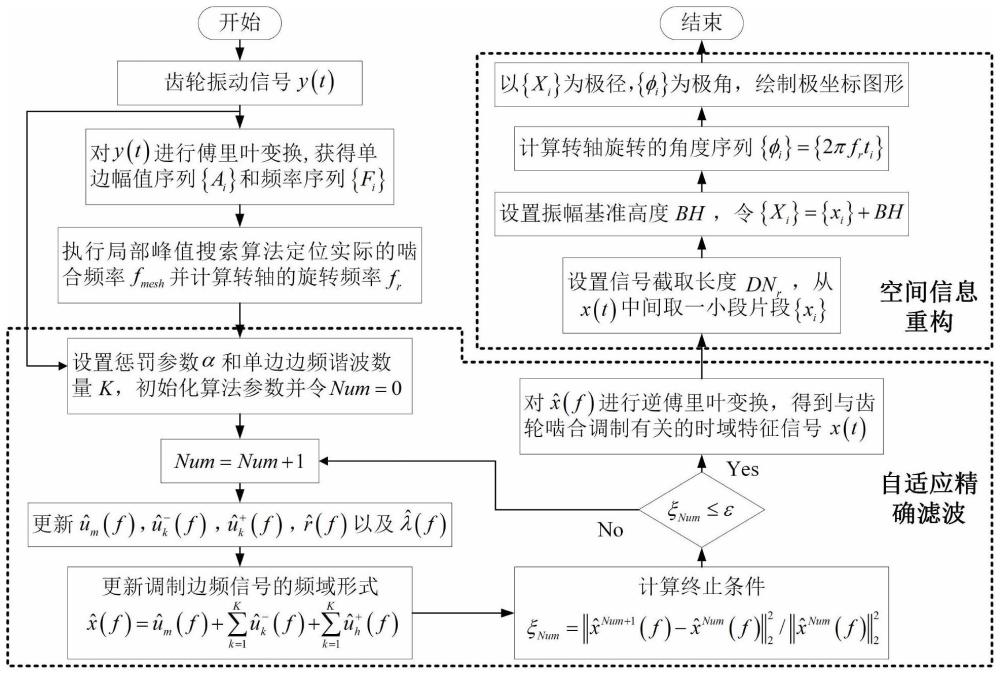
4、步骤s1,对传感器采集到的齿轮振动信号进行傅里叶变换,获得信号频谱的单边幅值序列{ai}和对应的频率序列{fi},其中n为采样点数,为向下取整运算;
5、步骤s2,利用局部峰值搜索算法对单边幅值序列{ai}进行搜索,定位实际的啮合频率fmesh并计算转轴的旋转频率fr;
6、步骤s3,利用自适应精确滤波方法对齿轮振动信号进行处理,提取啮合频率附近的调制边频成分,获得时域特征信号;
7、步骤s4,截取时域特征信号的中间片段,以空间信息重构的方式绘制极坐标图形,实现齿轮啮合状态的可视化显示。
8、步骤s2的具体过程如下:
9、s201:根据齿轮的齿数z以及转速计提供的转轴转速nt信息确定频率搜索范围[fd,fu],表达式如下:
10、
11、其中σ为频率搜索范围调整系数,σ的取值范围为[0.2,0.8];
12、s202:在频率搜索范围[fd,fu]内搜索单边幅值序列{ai}的局部最大峰值该峰值对应的频率即为实际的啮合频率fmesh;
13、s203:由实际的啮合频率fmesh计算出转轴的旋转频率fr,如下式:
14、fr=fmesh/z。
15、步骤s3中所述的自适应精确滤波方法通过构造和求解变分优化模型来实现,频谱中以啮合频率fmesh为中心并以转轴旋转频率fr为间隔的调制边频信号x(t)可表示为啮合频率谐波以及啮合频率fmesh与转轴旋转频率fr差和的边频谐波的组合形式,表达式如下:
16、
17、式中um(t),和分别表示啮合频率谐波,第k个左边频谐波和第k个右边频谐波;am(t),和分别表示它们的瞬时幅值;θm,和分别表示它们的初始相位;k=1,…,k,k为单边边频谐波的数量;t=t1,…,tn为采样时间点;
18、假设啮合频率谐波和各个边频谐波的瞬时幅值和瞬时频率变化远小于相位变化,则x(t)在频谱上表现为紧凑于fmesh,fmesh-kfr和fmesh+kfr的局部窄带形式;
19、由传感器采集到的齿轮振动信号y(t),为调制边频信号x(t)和干扰信号r(t)的混合信号:
20、y(t)=x(t)+r(t)
21、构造带等式约束的变分优化模型,通过最小化如下的目标函数实现自适应精确滤波:
22、
23、
24、式中*表示卷积符号,表示对时间序列求偏导,表示l2范数的平方;δ(t)为狄拉克函数,j为虚部符号,满足j2=-1;
25、引入拉格朗日乘子消除变分优化模型中的等式约束,得到增广拉格朗日函数表达式如下:
26、
27、式中λ(t)为拉格朗日乘子,<·>表示内积运算;惩罚参数α>0起到调节该自适应精确滤波器局部带宽的作用,α的取值范围为103~109;
28、根据帕塞瓦尔等式,将增广拉格朗日函数重写为频域表达形式,如下:
29、
30、式中sgn(·)为符号函数;使用交替方向乘子法求解上述优化问题,迭代更新参数fr,以及
31、步骤s3的具体过程如下:
32、s301:输入啮合频率fmesh,转轴旋转频率fr,设置惩罚参数α和单边边频谐波数量k,初始化参数以及并令num=0;
33、s302:num=num+1,进入迭代优化过程;
34、s303:根据如下迭代公式更新
35、
36、s304:k=1:k,根据如下迭代公式更新
37、
38、s305:k=1:k,根据如下迭代公式更新
39、
40、s306:根据如下迭代公式更新fr:
41、
42、s307:根据如下迭代公式更新
43、
44、s308:根据如下迭代公式更新
45、
46、式中τ为拉格朗日乘子更新参数,取值范围为[0,1];
47、s309:更新调制边频信号的频域形式:
48、
49、s310:重复步骤s302到s309,直到满足收敛约束条件:
50、
51、s311:对迭代优化后获得的进行逆傅里叶变换,得到消噪后的时域特征信号x(t)。
52、步骤s4的具体过程如下:
53、s401:根据采样频率fs和步骤s3最终提供的转轴旋转频率fr计算出转轴旋转一圈对应的采样点数nr:
54、
55、式中为向上取整运算;
56、s402:设置信号截取的长度为dnr,从时域特征信号x(t)的中间截取一小段片段{xi},其中d为转轴的旋转圈数;
57、s403:设置振幅基准高度bh,令{xi}={xi}+bh,要求满足所有xi>0;
58、s404:由采样时间序列{ti}计算出转轴旋转的角度序列{φi}={2πfrti},其中
59、s405:以振幅序列{xi}为极径,角度序列{φi}为极角,绘制极坐标图形。
60、与现有技术相比,本发明的有益效果为:
61、(1)与传统的带通滤波器以及自适应分解方法相比,本发明提供的自适应精确滤波方法能够消除调制边频带内的无关干扰,获得更加纯净的齿轮啮合调制特征信号。
62、(2)本发明采用空间信息重构的方式将时域特征信号映射到极坐标中,以极坐标图形的方式直观展示各个轮齿的啮合状态,克服了传统技术对齿轮振动信号可视化效果不佳的问题。
63、(3)本发明提供的算法实施简单,性能稳定且运算速度较快,最终的结果可视性强,能够为齿轮健康状态的监测和诊断提供重要技术支持。
- 还没有人留言评论。精彩留言会获得点赞!