一种测量光学元件或成像系统像差的方法及装置与流程
本发明涉及成像,特别是涉及一种测量光学元件或成像系统像差的方法及装置。
背景技术:
1、光学成像技术在现代社会中扮演着重要角色,按照成像尺度可以粗略分为显微成像、摄影成像和天文成像,每种类别都有其独特的结构和功能。其中,显微成像是一种利用显微镜或其他仪器,将微米乃至亚微米的物体放大后观察其形态、结构和功能的技术,在生物学、医学、材料科学等领域发挥着重要作用,能够帮助人们揭示生命奥秘、诊断疾病、以及开发新材料等。摄影成像是一种利用相机或其他设备将光线反射或透射的图像记录下来的技术,在艺术、文化、教育、新闻等领域具有重要价值,能够帮助传播信息、记录历史与展示美感等。天文成像是一种利用望远镜或其他探测器将天空中的恒星、行星、星系等天体图像捕捉下来的技术。它在天文学、物理学、宇宙学等领域具有深远意义,能够帮助人们探索宇宙,理解自然规律,寻找外星生命信号等。
2、然而,在实际应用中,成像系统经常会受到像差的影响,导致图像模糊和失真,降低了图像对比度和清晰度。
3、现在有一些可以测量和传感光波前的技术,波前是理论上物平面上无限小的点在瞳平面上的光波阵列的等相位面二维分布,波前为平面时图像不会发生失真。波前分布可以体现单个视场位置上模糊和失真情况,但无法了解全视场的情况,获得单个位置的波前不能得到成像系统的像差;像差可以描述成像全视场上的模糊和失真,获得像差数据可以计算视场各位置的波前分布。
4、但是,目前,还没有可以直接测量成像系统像差的技术。
技术实现思路
1、本发明的目的在于提供一种测量光学元件或成像系统像差的方法及装置,其能够直接测量当前尚无法测量的成像系统完整像差信息。
2、为实现上述目的,本发明提供一种测量光学元件或成像系统像差的方法,其包括:
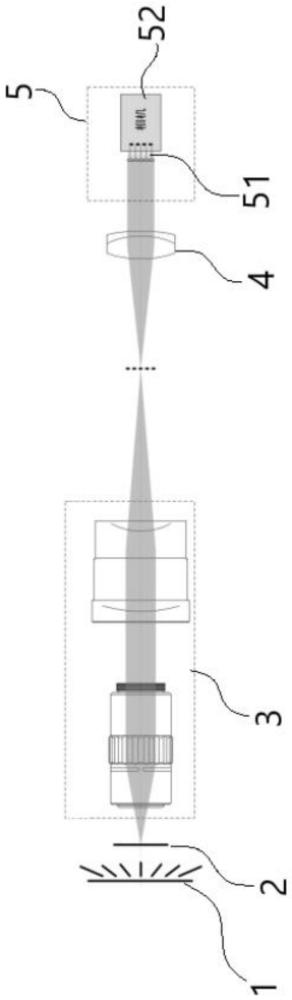
3、步骤1,利用像差传感器测量光学元件或成像系统的实际微透镜子图像a1,像差传感器包括微透镜阵列和相机,散射光照明器发出的散射光将掩模板照明,然后通过光学元件或成像系统,在微透镜阵列中的每个微透镜后投影得到一个子图像,相机拍摄得到的所有子图像组成一个图像阵列,实际微透镜子图像a1位于图像阵列的第m行第n列;
4、步骤2,获取实际微透镜子图像a1相对于理想无像差情况下微透镜子图像a2在微透镜阵列的归一化坐标系uv的水平方向u、和竖直方向v上的偏移量的离散分布其中,(x1,y1)表示理想无像差情况下微透镜子图像a2在单个微透镜的成像视场的归一化xy坐标系中的坐标;
5、步骤3,采用多项式拟合方法,计算的多项式系数组am,n和的多项式系数组bm,n;
6、步骤4,将所有的微透镜对应的多项式系数组am,n和bm,n排列为系数矩阵c,先获得双降维像差系数矩阵d,再获得赛德尔像差s。
7、进一步地,步骤4中,通过式(7)计算双降维像差系数矩阵d;
8、d=ce (7)
9、式(7)中,e为多项式偏导系数矩阵,e=pinv(e),e表示为式(9):
10、e=e1,e2,…,ei,…,ept (9)
11、式(9)中,t表示转置,ei表示对应瞳平面分解的多项式偏导函数的一维化列向量,如式(10)所示,i=1,2,…p,p为选用的最大多项式项数;
12、
13、式(10)中,zi(u,v)对应与归一化坐标系uv在同一个平面的瞳平面uv分解的多项式组z(u,v)的第i项,(u,v)为像差传感器的微透镜阵列的归一化坐标,和分别为水平方向u和竖直方向v的偏导数。
14、进一步地,步骤4中,根据双降维像差系数矩阵d的一维化向量dv,通过式(12)计算赛德尔像差s:
15、s=pinv(t)dv (12)
16、式(12)中,pinv(·)为伪逆运算,t为赛德尔像差s到一维化向量dv的转换矩阵,如下式(13)所示:
17、t=t偏移,t离焦,t球差,t慧差,t像散,t场曲,t畸变,… (13)
18、式(13)中,t偏移、t离焦、t球差、t慧差、t像散、t场曲、t畸变分别为图像平移量、离焦像差、球差像差、慧差像差、像散像差、场曲像差、畸变像差转化为一维化向量dv的转换矩阵。
19、进一步地,将散射光照明器、掩模板、待测光学元件或成像系统、准直透镜依次按照以下两种方式之一进行布置:
20、方式一,散射光照明器位于掩模板前方预设位置,以构成近似科勒照明,掩模板位于待测光学元件或成像系统的前焦面,准直透镜位于掩模板经过待测光学元件或成像系统后所成像的平面后一个准直透镜的焦距的距离,像差传感器中微透镜阵列位于准直透镜的后焦面;
21、方式二,散射光照明器位于掩模板前方预设位置处,以构成近似科勒照明,掩模板位于待测光学元件或成像系统的前焦面,像差传感器中微透镜阵列位于掩模板经过待测光学元件或成像系统后所成像的平面。
22、本发明还提供一种测量光学元件或成像系统像差的装置,其包括:
23、微透镜子图采集单元,其用于利用像差传感器测量光学元件或成像系统的实际微透镜子图像a1,像差传感器包括微透镜阵列和相机,散射光照明器发出的散射光将掩模板照明,然后通过光学元件或成像系统,在微透镜阵列中的每个微透镜后投影得到一个子图像,相机拍摄得到的所有子图像组成一个图像阵列,实际微透镜子图像a1位于图像阵列的第m行第n列;
24、偏移量离散分布获取单元,其用于获取实际微透镜子图像a1相对于理想无像差情况下微透镜子图像a2在微透镜阵列的归一化坐标系uv的水平方向u、和竖直方向v上的偏移量的离散分布其中,(x1,y1)表示理想无像差情况下微透镜子图像a2在单个微透镜的成像视场的归一化xy坐标系中的坐标;
25、多项式系数获取单元,其用于采用多项式拟合方法,计算的多项式系数组am,n和的多项式系数组bm,n;
26、双降维像差获取单元,其用于将所有的微透镜对应的多项式系数组am,n和bm,n排列为系数矩阵c,再获得双降维像差系数矩阵d;
27、赛德尔像差获取单元,其用于根据双降维像差系数矩阵d,获得赛德尔像差s。
28、进一步地,双降维像差获取单元通过式(7)计算双降维像差系数矩阵d;
29、d=ce (7)
30、式(7)中,e为多项式偏导系数矩阵,e=pinv(e),e表示为式(9):
31、e=e1,e2,…,ei,…,ept (9)
32、式(9)中,t表示转置,ei表示对应瞳平面分解的多项式偏导函数的一维化列向量,如式(10)所示,i=1,2,…p,p为选用的最大多项式项数;
33、
34、式(10)中,zi(u,v)对应与归一化坐标系uv在同一个平面的瞳平面uv分解的多项式组z(u,v)的第i项,(u,v)为微透镜阵列所在平面的归一化坐标,和分别为水平方向u和竖直方向v的偏导数。
35、进一步地,赛德尔像差获取单元根据双降维像差系数矩阵d的一维化向量dv,通过式(12)计算赛德尔像差s:
36、s=pinv(t)dv (12)
37、式(12)中,pinv(·)为伪逆运算,t为赛德尔像差s到一维化向量dv的转换矩阵,如下式(13)所示:
38、t=t偏移,t离焦,t球差,t慧差,t像散,t场曲,t畸变,… (13)
39、式(13)中,t偏移、t离焦、t球差、t慧差、t像散、t场曲、t畸变分别为图像平移量、离焦像差、球差像差、慧差像差、像散像差、场曲像差、畸变像差转化为一维化向量dv的转换矩阵。
40、进一步地,将散射光照明器、掩模板、待测光学元件或成像系统、准直透镜依次按照以下两种方式之一进行布置:
41、方式一,散射光照明器位于掩模板前方预设位置,以构成近似科勒照明,掩模板位于待测光学元件或成像系统的前焦面,准直透镜位于掩模板经过待测光学元件或成像系统后所成像的平面后一个准直透镜的焦距的距离,像差传感器中微透镜阵列位于准直透镜的后焦面;
42、方式二,散射光照明器位于掩模板前方预设位置处,以构成近似科勒照明,掩模板位于待测光学元件或成像系统的前焦面,像差传感器中微透镜阵列位于掩模板经过待测光学元件或成像系统后所成像的平面。
43、进一步地,通过光源波长切换实现不同波长下的像差测量,即完成色差测量。
44、本发明能够直接测量光学元件或成像系统的偏移、离焦、球差、慧差、像散、场曲、畸变以及高阶像差、随机像差、色差等像差,而且,一方面,通过高精度图像配准算法可以提高传感分辨率,另一方面,可以基于高阶的空间变化波前分布结果获取像差分布。
- 还没有人留言评论。精彩留言会获得点赞!