一种空地两用机器人双模态自主探索方法及装置
本发明属于机器人自主探索,尤其涉及一种空地两用机器人双模态自主探索方法及装置。
背景技术:
1、在探索任务中,通常使用的地面机器人越障能力极为有限,很多地形下无法正常工作,同时空中机器人有相比地面机器人更大的能量消耗,续航时间极为有限。为克服上述问题,目前很多探索系统采用了多机器人空地协同方案,但是又引入了更为复杂的多机器人规划、定位、决策问题。使用空地双模态机器人进行探索任务很好地解决了上述困境。
2、目前尚未有专门针对该空地两用机器人平台设计的探索方法,因此主要讨论空中机器人探索、地面机器人探索和空地协同多机器人探索方法的技术缺点与痛点。
3、当前的地面机器人探索方法主要局限在于机器人机动性有限、越障能力差,对于复杂环境,如地面情况坑洼不平、有大量障碍物、存在垂直通道等情况,地面机器人将无法完成探索任务。
4、当前的空中机器人探索方法主要局限于空中机器人的高耗能、短续航,空中机器人大部分能量消耗在克服自身重力,即使探索相同距离也会消耗更多能量。同时由于空中机器人的续航时间对于负载重量敏感,空中机器人搭载的传感器通常只有有限的视域,观测范围会受到限制。
5、当前的空地协同机器人探索方法就是为了解决上述两种方法的缺点,但是却引入了新的、更为复杂的多机器人规划、定位、决策等一系列问题,同时多机器人系统需要更高的维护成本,系统复杂度远超单机器人系统。
技术实现思路
1、针对现有技术存在的不足,本技术实施例的目的是提供一种空地两用机器人双模态自主探索方法及装置。
2、根据本技术实施例的第一方面,提供一种空地两用机器人双模态自主探索方法,包括:
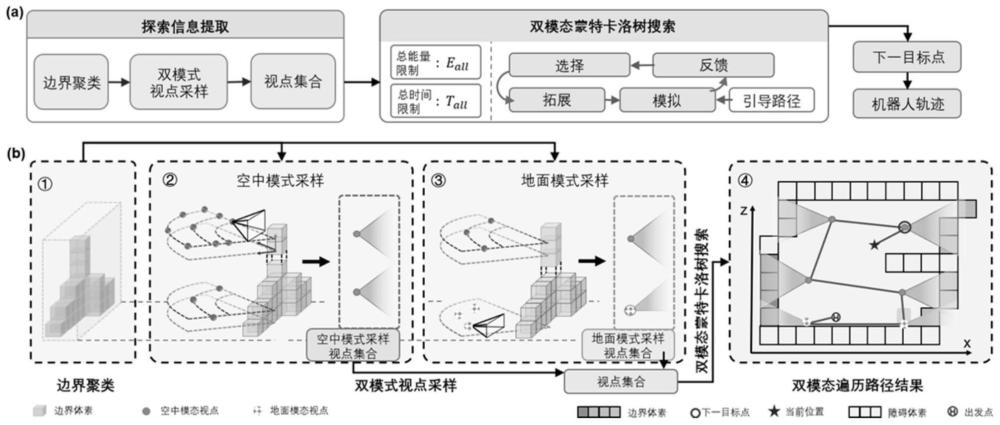
3、探索环境信息提取:机器人根据当前已感知环境构建栅格地图,从所述栅格地图中提取所有已知边界的体素并对提取出的体素进行聚类,得到若干边界聚类,依照机器人在空中模态和地面模态不同的感知特性,对每个所述边界聚类进行视点采样,分别得到空中采样模式和地面采样模式下的视点集合;
4、双模态蒙特卡洛树搜索:以采样视点作为节点,构建双模态蒙特卡洛树,通过对所述双模态蒙特卡洛树的迭代选择、拓展、模拟、反馈,得到带运动模态的最佳视点序列;
5、基于所述最佳视点序列进行轨迹规划,从而实现自主探索。
6、进一步地,栅格地图中的每个体素有空闲、占用、未知三种状态,其中空闲指该体素已被感知到且无障碍,占用状态指体素已被感知到且有障碍,未知状态指体素未被感知到。
7、进一步地,所述已知边界的体素为空闲状态且有未知状态的邻居体素。
8、进一步地,对于采样到的视点vpi,其到视点vpj之间转移的时间消耗为:
9、
10、其中length(vpi,vpj)是从视点vpi到视点vpj的距离,dyaw(vpi,vpj)是从视点vpi到视点vpj的最小偏航角之差,m指机器人模态,vm,max和ωm,max是机器人在模态m下的最大速度和最大偏航角速度;
11、视点vpi到视点vpj之间转移的能量消耗为:
12、e(vpi,vpj,m)=pm,avg·t(vpi,vpj,m),
13、其中pm,avg是在模态m下的平均每单位时间的能量消耗。
14、进一步地,在所述双模态蒙特卡洛树中,视点vpi可能的子节点对应的vpj需要满足以下条件:1)vpj尚未被当前vpi节点所在的枝包含;2)vpi与vpj之间的路径距离小于预定阈值;3)如果在vpi所在的枝中,已经包含同属于vpj所对应的边界聚类的其他视点,那么与vpj需要与该已包含视点保持一样的采样模式。
15、进一步地,在所述双模态蒙特卡洛树中,每个节点的评分向量其中ig(v)是节点v对应的视点vp的信息增益,为包含在该视点视域中的边界体素的数量,n(v)是当前节点v的子树中的节点数量,和分别是完整探索任务后的剩余能量er(v和剩余时间tr(v)的惩罚函数,其中eall是原有总能量,其中tall是原有总时间,a1,b1,a2,b2是决定惩罚函数形状的超参数。
16、进一步地,对所述双模态蒙特卡洛树迭代进行以下步骤(1)-(3)所示的选择、拓展、模拟、反馈过程,到预定迭代阈值后停止,选择最高评分的子节点作为下一个轨迹规划的目标点,包括:
17、(1)选择过程:
18、从根节点出发,递归地选择最优叶节点作为准备进行拓展的节点,其中选择策略遵循置信上限规则;
19、(2)模拟与拓展过程:
20、对于所选的视点节点vi∈vgi,在其潜在的子节点中随机选择一个进行拓展,其中vg为同一个边界聚类的所有视点组成视点集合;
21、更新机器人到达新拓展节点vpi+1的剩余能量和剩余时间,其中剩余能量er(vpi+1)如下:
22、er(vpi+1)=er(vpi)-e(vpi,vpi+1),
23、其中e(vpi,vpi+1)是从vpi到vpi+1的能量消耗,er(vpi)为机器人到达vpi时的剩余能量;
24、基于旅行商问题,得到从vpi+1出发,遍历所有边界聚类并返回出发点的最短引导路径;
25、得到所述最短引导路径后,对从vpi+1出发完成探索任务后的剩余能量和剩余时间er,tr进行更新,其中剩余能量er的更新如下:
26、
27、其中,k为机器人需要访问的总节点个数,e(vgq,vgq+1,(t+a)/2)表示平均模态m=(t+a)/2下机器人从视点集合vgq到vgq+1的能量消耗,e(vgk,ph)表示从最后一个视点返回出发点的能量消耗,ph为出发点的位置;
28、在扩展过程中引入剪枝规则:当估计的剩余能量下界或剩余时间下界为负数时,剪枝该节点并不再拓展,所述剩余能量下界为:
29、
30、其中表示遍历完所有视点集合的能量消耗下界,e(vgq,vgq+1,t)为模态t下机器人从视点集合vgq到vgq+1的能量消耗;
31、遍历完所有视点集合的时间消耗下界为t(vgq,vgq+1,a)为模态a下机器人从视点集合vgq到vgq+1的时间消耗;
32、(3)反馈过程:
33、通过回溯到根节点并更新回溯路径上所有节点的评分,来得到新扩展节点的评分;在反馈过程中,每个被回溯节点的子节点数增加1,然后更新ig的累计评分和er、tr的平均评分:
34、
35、
36、ig(v)=ig(v)+ig(v.kid)
37、其中ig(v)是节点v对应的视点vp的信息增益,num(v.kid)为节点v的子节点个数。
38、根据本技术实施例的第二方面,提供一种空地两用机器人双模态自主探索装置,包括:
39、探索环境信息提取模块:机器人根据当前已感知环境构建栅格地图,从所述栅格地图中提取所有已知边界的体素并对提取出的体素进行聚类,得到若干边界聚类,依照机器人在空中模态和地面模态不同的感知特性,对每个所述边界聚类进行视点采样,分别得到空中采样模式和地面采样模式下的视点集合;
40、双模态蒙特卡洛树搜索模块:以采样视点作为节点,构建双模态蒙特卡洛树,通过对所述双模态蒙特卡洛树的迭代选择、拓展、模拟、反馈,得到带运动模态的最佳视点序列;
41、轨迹规划模块:基于所述最佳视点序列进行轨迹规划,从而实现自主探索。
42、根据本技术实施例的第三方面,提供一种电子设备,包括:
43、一个或多个处理器;
44、存储器,用于存储一个或多个程序;
45、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的方法。
46、根据本技术实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如第一方面所述方法的步骤。
47、本技术的实施例提供的技术方案可以包括以下有益效果:
48、由上述实施例可知,本技术将探索任务给定的探索时间和机器人剩余电量纳入考虑,结合已知环境信息对机器人轨迹及其对应模态进行科学合理的规划,能够驱动空地两用机器人完成双模态自主探索,在探索中,既具备地面机器人的低耗能特性,又具备空中机器人的出色机动能力与越障能力,可以在探索时间和能量受限的条件下灵活配置其运动模态实现更为高效的自主探索。
49、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!