一种车载毫米波雷达金属井盖目标误报抑制方法与流程
本技术涉及汽车安全,特别地涉及一种车载毫米波雷达金属井盖目标误报抑制方法。
背景技术:
1、毫米波雷达体积小、重量轻、测量精度高,且穿透烟雾、灰尘能力强,具有全天时全天候工作能力等优点,已广泛使用于汽车辅助驾驶、交通流量检测、无人机定高避障、智慧交通等领域。当毫米波雷达应用在汽车辅助驾驶上时,由于缺乏俯仰方向测角能力,容易探测到地面的金属井盖目标,造成误报使得车辆减速或急停,降低司机的驾驶体验。
2、为了解决地面金属井盖误报问题,传统做法中,一种是通过获取车速信息,利用毫米波雷达的测速能力,将相对地面静止目标全部滤除,这种方法可以解决误报问题,但是对于金属护栏、路边静止车辆等目标也会滤除,碰撞风险大大增加。另一种做法是提升目标散射截面积阈值来滤除金属井盖目标,这种做法会造成对行人、自行车等较低散射截面积值的目标漏报。
3、专利公布号cn113030976a,提出了一种利用激光雷达消除金属井盖对毫米波雷达干扰的方法,该方法通过激光雷达获取金属井盖所在区域,然后将毫米波雷达在该区域上的目标全部删除。激光雷达在雨雾等能见度较低的天气环境下性能会急剧下降,在这种天气环境下该方法将失效,且增加激光雷达成本较高。
4、本发明提供了一种车载毫米波雷达金属井盖目标误报抑制方法,无需增加其他传感器做辅助融合,成本较低,不受雨雾天气影响。
技术实现思路
1、针对上述问题,本技术提供一种车载毫米波雷达金属井盖目标误报抑制方法,通过对疑似地面金属井盖目标的关联的历史点云数据中的目标散射截面积建立数组序列,与预先记录的地面金属井盖目标散射截面积建立的数组序列进行相关系数计算,充分利用地面金属井盖目标相对雷达目标散射截面积的变化趋势,能够较为准确的判断该目标是否为地面金属井盖目标。
2、一种车载毫米波雷达金属井盖目标误报抑制方法,步骤如下:
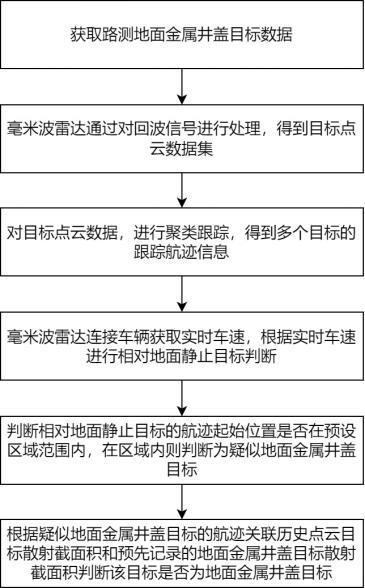
3、s1、使用毫米波雷达路测地面金属井盖,得到地面金属井盖的回波信号,并对地面金属井盖的回波信号进行信号处理,得到路测地面金属井盖目标数据,路测地面金属井盖目标数据包括地面金属井盖目标距离毫米波雷达的径向距离、地面金属井盖目标相对于毫米波雷达的方位角度、地面金属井盖目标相对于毫米波雷达的相对速度和地面金属井盖目标散射截面积;
4、s2、毫米波雷达通过对回波信号进行信号处理,得到目标点云数据集,目标点云数据包括目标距离毫米波雷达的径向距离、目标相对于毫米波雷达的方位角度、目标相对于毫米波雷达的相对速度和目标散射截面积;
5、s3、对目标点云数据,进行聚类跟踪,得到多个目标的跟踪航迹信息,记录所有目标的跟踪航迹信息,目标的跟踪航迹信息包括航迹起始坐标、航迹关联历史点云数据和航迹速度,航迹关联历史点云数据包括航迹关联历史点云目标距离毫米波雷达的径向距离、航迹关联历史点云目标相对于毫米波雷达的方位角度、航迹关联历史点云目标相对于毫米波雷达的相对速度和航迹关联历史点云目标散射截面积;
6、s4、毫米波雷达通过通讯接口连接车辆获取实时车速;
7、s5、遍历所有目标的跟踪航迹信息,获取所有目标的航迹速度;
8、s6、根据先验安装信息、目标的航迹速度和实时车速逐一判断目标的航迹速度是否满足相对地面静止的条件,若能满足则目标为疑似相对地面静止目标,进入s7;若不能满足则目标不为疑似相对地面静止目标,无操作;
9、s7、根据连续n帧该目标的航迹速度判断目标是否均满足相对地面静止的条件,若连续n帧均满足相对地面静止的条件,则该目标为相对地面静止目标,进入s8;若存在1帧不满足相对地面静止的条件,则该目标为相对地面运动目标;
10、s8、根据所有相对地面静止目标的航迹起始坐标逐一判断所有相对地面静止目标中是否存在疑似地面金属井盖目标,若存在疑似地面金属井盖目标,进入s9;若不存在疑似地面金属井盖目标,无操作;
11、s9、遍历所有疑似地面金属井盖目标的目标点云数据,根据疑似地面金属井盖目标的航迹关联历史点云目标散射截面积和预先记录的地面金属井盖目标散射截面积判断该目标是否为地面金属井盖目标,若该目标为地面金属井盖目标,则在数据输出时不输出该目标数据;若该目标不为地面金属井盖目标,无操作。
12、优选地,根据先验安装信息、目标的航迹速度和实时车速逐一判断目标的航迹速度是否满足相对地面静止的条件的方法为:
13、根据先验安装信息,获取毫米波雷达的安装方式,安装方式包括前向安装还是后向安装;
14、若毫米波雷达的安装方式为前向安装,此时相对地面静止的条件为目标的航迹速度等于实时车速的负数,遍历所有目标跟踪航迹,判断该目标的航迹速度是否等于实时车速的负数,若等于则该目标为疑似相对地面静止目标;若不等于则该目标为相对地面运动目标;
15、若毫米波雷达的安装方式为后向安装,此时相对地面静止的条件为目标的航迹速度等于实时车速,遍历所有目标跟踪航迹,判断该目标的航迹速度是否等于实时车速,若等于则该目标为疑似相对地面静止目标;若不等于则该目标为相对地面运动目标。
16、优选地,根据所有相对地面静止目标的航迹起始坐标逐一判断所有相对地面静止目标中是否存在疑似地面金属井盖目标的具体方法为:
17、遍历所有相对地面静止目标,判断该目标航迹起始位置坐标是否同时满足条件,,其中;其中,为预先设置区域x方向最小值,为预先设置区域x方向最大值,为预先设置区域y方向最小值,为预先设置区域y方向最大值,为编号为的目标的航迹起始位置x坐标,为编号为的相对地面静止目标的航迹起始位置y坐标,为相对地面静止目标的最大编号,该预设区域的值根据地面金属井盖目标数据设定。
18、优选地,根据疑似地面金属井盖目标的航迹关联历史点云目标散射截面积和预先记录的地面金属井盖目标散射截面积判断该目标是否为地面金属井盖目标的步骤为:
19、将疑似地面金属井盖目标航迹关联历史点云目标散射截面积作为序列,为疑似地面金属井盖目标航迹关联历史点云目标散射截面积的编号,为疑似地面金属井盖目标航迹关联历史点云目标散射截面积的最大编号;将路测地面金属井盖目标数据中目标散射截面积里选择个数据作为序列,为路测地面金属井盖目标数据中目标散射截面积的编号,为路测地面金属井盖目标数据中目标散射截面积的最大编号;
20、计算序列和序列的相关系数:;
21、其中,为序列和序列的相关系数,取值范围为1至k,为序列a中第i个数据,为序列a均值,为序列a标准差,为序列b中第个数据,为序列b均值,为序列b标准差;
22、判断相关系数是否大于,为预先设置的相关性阈值,若相关系数大于,则该疑似地面金属井盖目标为地面金属井盖目标;若相关系数不大于,则该疑似地面金属井盖目标不为地面金属井盖目标。
23、优选地,将路测地面金属井盖目标数据中目标散射截面积里选择个数据作为序列的选取方法为:
24、根据序列中航迹关联历史点云目标散射截面积对应的航迹关联历史点云目标距离毫米波雷达的径向距离和航迹关联历史点云目标相对于毫米波雷达的方位角度为参考,在路测地面金属井盖目标数据中选择位置坐标最近的目标对应的地面金属井盖目标散射截面积,存入与该航迹关联历史点云目标散射截面积在序列中位置对应的序列的位置上,直到在路测地面金属井盖目标数据中选择完个数据,即可得到序列。
25、优选地,本方法采用dbscan聚类算法对目标点云数据进行聚类。
26、本技术具有以下优点:
27、1、本技术使用毫米波雷达通过对目标航迹速度与实时车速进行多帧比较,能够准确的区分地面静止目标与运动目标,通过对目标航迹起始位置的判断,能够剔除如金属电线杆等凸出地面的其他地面目标,进一步提高对地面金属井盖目标识别的准确率;
28、2、本技术通过对疑似地面金属井盖目标的关联的历史点云数据中的目标散射截面积建立数组序列,与预先记录的地面金属井盖目标散射截面积建立的数组序列进行相关系数计算,充分利用地面金属井盖目标相对雷达目标散射截面积的变化趋势,能够较为准确的判断该目标是否为地面金属井盖目标,无需视觉等其他传感器作为辅助,成本低,计算简单,准确性高,实时性好,有利于推广,能够很好的应用于产品中。
- 还没有人留言评论。精彩留言会获得点赞!