基于TD-DDMA的大尺寸天线阵列控制方法以及相关设备与流程
本发明涉及阵列信号处理,尤其涉及一种基于td-ddma的大尺寸天线阵列控制方法以及相关设备。
背景技术:
1、近年来,汽车雷达系统的研发具有很大的社会和经济效益,随着毫米波雷达技术的发展,4d成像毫米波雷达逐渐成为目前自动驾驶领域的研究热点,该雷达系统的优越性主要体现在波形设计和大尺寸天线阵列设计两方面:前者可以在系统探测威力、分辨能力和抗干扰等多个方面综合考虑,实现波形优化;后者可以在阵列波束覆盖范围、空间分辨能力和阵列副瓣电平等多个方面综合考虑,实现大尺寸天线阵列优化,其中,4d成像雷达常用的波形设计方案包括tdma和ddma。
2、但实际应用过程中,tdma和ddma分别存在着不同的技术问题,例如,当考虑到大尺寸天线阵列的设计时,tdma雷达系统的最大测速范围会随着发射天线数的增多而成倍下降,发射功率也会损失;而当发射天线数增多时,ddma雷达系统在频谱资源均分后的频率偏移间距过小,使得系统中存在频偏误差时,会导致频率校正和通道分离的错误率上升,从而增大后续的速度解算和角度估计的出错概率并影响雷达系统的整体探测性能;综上,由于上述问题的存在,导致常规的汽车雷达在应用这两种波形时序时无法实现高精度的目标4d成像。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本发明实施例提供了一种基于td-ddma的大尺寸天线阵列控制方法、系统、电子设备和介质,旨在解决现有技术中大尺寸天线阵列应用时可能存在的最大速度探测范围下降,频谱资源利用不合理,影响雷达系统的整体探测性能的技术问题,进而实现高精度的目标4d成像。
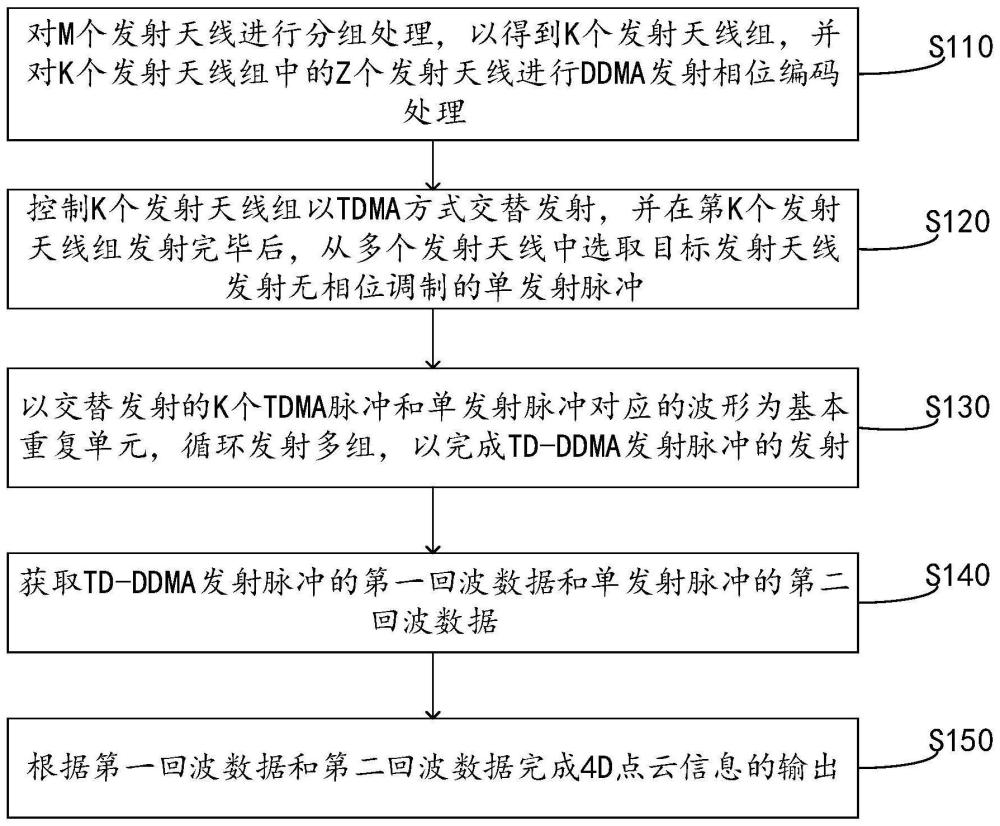
3、为实现上述目的,本发明实施例的第一方面提出了一种基于td-ddma的大尺寸天线阵列控制方法,所述方法应用于大尺寸天线阵列系统,所述方法包括:对m个发射天线进行分组处理,以得到k个发射天线组,并对k个所述发射天线组中的z个发射天线进行ddma发射相位编码处理;控制k个所述发射天线组以tdma方式交替发射,并在第k个所述发射天线组发射完毕后,从多个所述发射天线中选取目标发射天线发射无相位调制的单发射脉冲;以交替发射的k个tdma脉冲和所述单发射脉冲对应的波形为基本重复单元,循环发射多组,以完成td-ddma发射脉冲的发射;获取所述td-ddma发射脉冲的第一回波数据和所述单发射脉冲的第二回波数据;根据所述第一回波数据和所述第二回波数据完成4d点云信息的输出。
4、在一些实施例中,所述根据所述第一回波数据和所述第二回波数据完成4d点云信息的输出,包括:分别对所述第一回波数据和所述第二回波数据进行距离维和速度维fft处理,得到第一雷达立方体数据和第二雷达立方体数据;根据所述第二雷达立方体数据输出目标的距离索引、速度索引和第一信噪比;根据所述第一雷达立方体数据、所述第二雷达立方体数据、所述距离索引和所述速度索引输出目标的速度模糊度、水平角索引、俯仰角索引和第二信噪比;根据所述距离索引、所述速度索引、所述速度模糊度、所述水平角索引、所述俯仰角索引、所述第一信噪比和所述第二信噪比完成4d点云信息的输出。
5、在一些实施例中,所述根据所述第二雷达立方体数据输出目标的距离索引、速度索引和第一信噪比,包括:基于所述第二雷达立方体数据,沿接收通道方向进行非相干积累处理,构建目标的二维检测数据矩阵;对所述二维检测数据矩阵进行二维cfar目标检测处理,输出目标的距离索引、速度索引和第一信噪比。
6、在一些实施例中,所述根据所述第一雷达立方体数据、所述第二雷达立方体数据、所述距离索引和所述速度索引输出目标的速度模糊度、水平角索引、俯仰角索引和第二信噪比,包括:根据所述第一雷达立方体数据、所述第二雷达立方体数据、所述距离索引和所述速度索引,得到第一通道相位矩阵,并输出目标的速度模糊度;根据所述速度索和引所述速度模糊度对所述第一通道相位矩阵进行补偿,以基于补偿结果输出目标的水平角索引、俯仰角索引和第二信噪比。
7、在一些实施例中,所述根据所述第一雷达立方体数据、所述第二雷达立方体数据、所述距离索引和所述速度索引,得到第一通道相位矩阵,并输出目标的速度模糊度,包括:基于所述距离索引和所述速度索引,对所述第一雷达立方体数据进行发射相位提取处理,得到第一通道相位矩阵;对所述第二雷达立方体数据进行发射相位提取处理,得到第一通道相位序列;从所述第一通道相位矩阵中提取出所述目标发射天线对应的第二通道相位序列;获取所述第一通道相位序列和所述第二通道相位序列的脉冲延迟相位差,并根据所述脉冲延迟相位差进行速度模糊解算处理,以输出目标的速度模糊度。
8、在一些实施例中,所述根据所述速度索和引所述速度模糊度对所述第一通道相位矩阵进行补偿,以基于补偿结果输出目标的水平角索引、俯仰角索引和第二信噪比,包括:根据所述速度索引和所述速度模糊度计算速度补偿矩阵;根据所述速度补偿矩阵对所述第一通道相位矩阵进行多普勒频移补偿处理,得到第二通道相位矩阵;基于所述第二通道相位矩阵对m个所述发射天线进行重排处理,并执行空间维二维fft,以及空间二维谱的cfar检测,以输出目标的水平角索引、俯仰角索引和第二信噪比。
9、在一些实施例中,各所述发射天线组中的z个所述发射天线均同时发射,所述从多个所述发射天线中选取目标发射天线发射无相位调制的单发射脉冲,包括:获取第k个发射的所述发射天线组中的z个所述发射天线的天线序号;根据所述天线序号将第k个发射的所述发射天线组中的第一根发射天线确定为目标发射天线;控制所述目标发射天线发射无相位调制的单发射脉冲。
10、为实现上述目的,本发明实施例的第二方面提出了一种基于td-ddma的大尺寸天线阵列系统,所述系统包括:分组编码模块,用于对m个发射天线进行分组处理,以得到k个发射天线组,并对k个所述发射天线组中的z个发射天线进行ddma发射相位编码处理;发射控制模块,用于控制k个所述发射天线组以tdma方式交替发射,并在第k个所述发射天线组发射完毕后,从多个所述发射天线中选取目标发射天线发射无相位调制的单发射脉冲;以交替发射的k个tdma脉冲和所述单发射脉冲对应的波形为基本重复单元,循环发射多组,以完成td-ddma发射脉冲的发射;信号处理模块,用于获取所述td-ddma发射脉冲的第一回波数据和所述单发射脉冲的第二回波数据;根据所述第一回波数据和所述第二回波数据完成4d点云信息的输出。
11、为实现上述目的,本发明实施例的第三方面提出了一种电子设备,所述电子设备包括存储器、处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
12、为实现上述目的,本发明实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
13、本发明提出的基于td-ddma的大尺寸天线阵列控制方法、系统、设备和介质,至少具有如下有益效果:首先,本发明通过控制k个进行过ddma发射相位编码处理的所述发射天线组以tdma方式交替发射的方式,以完成大尺寸天线阵列的多发射天线的分组tdma发射以及组内的ddma的频移设计,其中,分组tdma发射可以有效降低帧重复时间,可以在提高系统刷新率的同时,实现tdma雷达系统的多普勒范围的提升,以防止最大测速范围下降,并减少高速运动目标的距离徙动,进而使得本发明可以更合理有效的基于频移设计均分利用组内的ddma频带资源;同时,本发明通过在第k个所述发射天线组发射完毕后,从多个所述发射天线中选取目标发射天线发射无相位调制的单发射脉冲的方式,使得本发明在回波数据处理的过程中,可以基于单发射脉冲的回波数据,通过cfar检测直接完成ddma的通道分离,进而能够避免频谱冗余和空带资源浪费的情况发生,进一步加强本发明对频谱资源的利用,以提高雷达系统的整体探测性能,满足4d成像雷达在汽车雷达系统中的应用,实现高精度的目标4d成像。
- 还没有人留言评论。精彩留言会获得点赞!