基于等效质心的海面弱散焦动目标测速与定位的方法及系统
本发明涉及雷达成像,具体涉及一种基于等效质心的海面弱散焦动目标测速与定位的方法及系统。
背景技术:
1、海面舰船是执行侦察监测和战略打击的重要对象。对海上目标进行监测与参数分析,有助于了解关键海域的船舶分布等战术情报,更精确地评估海上目标打击效果。在运动目标的sar图像中,舰船的运动会使成像呈现散焦模糊、位置偏移等特性,此时对动目标进行测速与定位将会产生不可忽视的误差。针对目标的运动产生的散焦模糊的问题,目前主要有两种处理思路,一种方法是对低速目标忽略散焦带来的影响,但是通常误差较大并且当目标速度过大时散焦问题是不可忽略的;另一种方法是通过自聚焦手段对sar图像进行聚焦,但这种方法会破坏目标在sar图像中的位置信息,对目标的定位造成不利的影响。
2、海面运动目标参数估计的研究主要分为速度参数与位置参数。海面动目标的速度参数主要包括方位向速度和径向速度。方位向速度估计方法有基于wvd(wigner-ville)分布的估计方法,基于分数阶fourier变换的估计方法,基于相位梯度自聚焦(pga)算法的估计方法等。径向速度的估计常用方法有基于dpca与基于ati技术的径向速度估计法,但这种方法系统硬件组成复杂,对飞行平台的性能要求较高。
3、海面动目标的位置参数可以分为方位向位置和距离向位置。在海面战场中,在无其他辅助参考点下直接实现对舰船目标的精确定位至关重要。无控制点的几何定标方法利用sar系统参数直接进行图像定位,通常使用距离多普勒定位模型进行目标定位。距离-多普勒(range-doppler,r-d)定位模型有三个基础方程式,分别是地球模型方程、sar多普勒方程与sar斜距方程。目前利用sar图像进行距离-多普勒定位的方法仅针对静止目标,现有的r-d方程的求解方法难以直接运用在对海面运动舰船的参数分析上
技术实现思路
1、本发明的目的在于提供一种高效的基于等效质心的海面弱散焦动目标测速与定位的方法及系统
2、为解决上述技术问题,本发明提供一种高效的基于等效质心的海面弱散焦动目标测速与定位的方法,包括以下步骤:
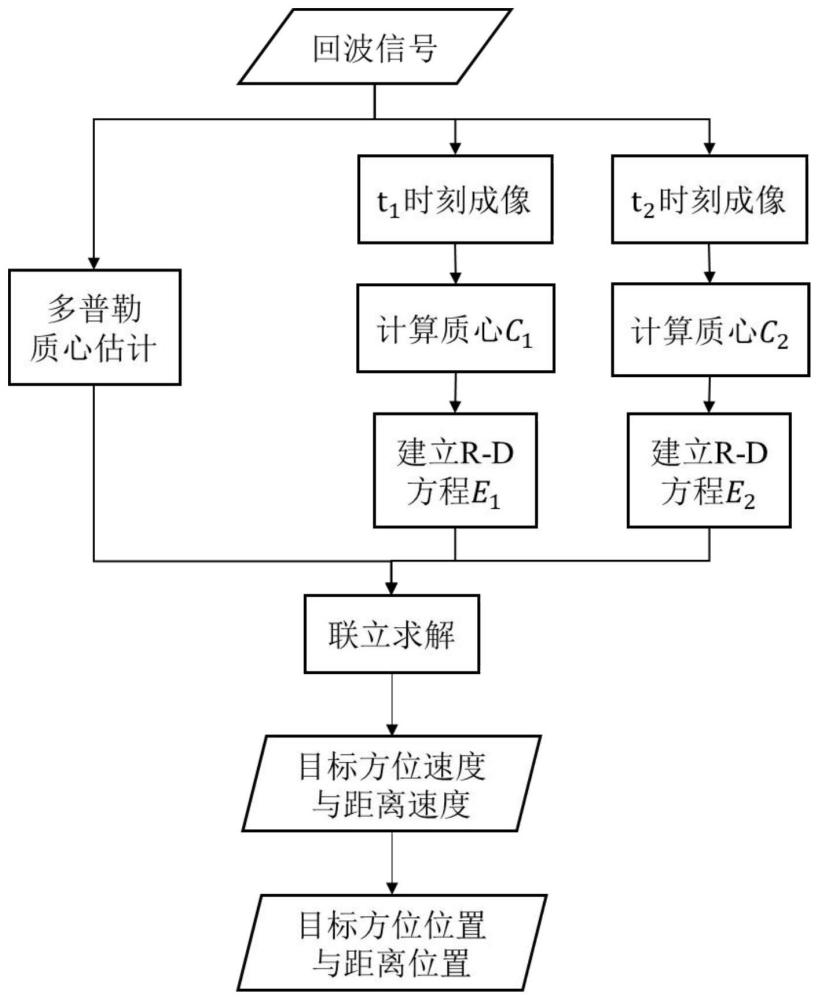
3、获取运动目标的两段连续方位时刻的雷达回波信号;
4、根据后向投影成像算法,对两段连续方位时刻的雷达回波信号分别进行sar成像,得到成像后二维复数矩阵s1与s2;
5、根据预设的阈值t,从成像后二维复数矩阵s1与s2中得到提取的二维矩阵sa1与sa2;
6、根据提取的二维矩阵sa1与sa2,计算得到等效质心点pct1(zct1,xct1)与pct2(zct2,xct2);
7、对等效质心点pct1(zct1,xct1)与pct2(zct2,xct2)进行方位向速度估计,得到方位向速度分量估计值;
8、对两段连续方位时刻的雷达回波信号进行多普勒中心频率估计,得到回波信号多普勒中心频率的估计值;
9、根据回波信号多普勒中心频率的估计值,计算得到多普勒频移;
10、根据方位向速度分量估计值和多普勒频移,得到距离向速度分量估计值;
11、根据等效质心点pct1(zct1,xct1)与pct2(zct2,xct2)、方位向速度分量估计值和距离向速度分量估计值进行初始位置估计,得到方位向初始位置分量估计值和距离向初始位置分量估计值。
12、优选地,根据后向投影成像算法,对两段连续方位时刻的雷达回波信号分别进行sar成像,得到成像后二维复数矩阵s1与s2,具体包括以下步骤:
13、根据两段连续方位时刻的雷达回波信号,构建二维复数矩阵c1和c2;
14、将二维复数矩阵c1和c2变换到距离频域,得到距离频域二维复数矩阵srd1与srd2;
15、将成像区域(z1:z2,x1:x2)离散化为二维成像网格g;
16、从距离频域二维复数矩阵src1与src2中提取一维行向量ri1与ri2,对一维行向量ri1与ri2进行插值,得到一维插值信号rii1与rii2;
17、计算雷达与当前时刻的二维成像网格g的距离ria与时延tid;
18、根据时延tid,计算得到当前时刻的相位补偿因子φi;
19、将时延tid对应到一维插值信号rii1与rii2中,并根据相位补偿因子φi进行相位补偿,得到补偿后的一维向量rc1与rc2;
20、直至遍历完成距离频域二维复数矩阵src1与src2,将所有的补偿后的一维向量rc1与rc2进行相干累加,使用reshape函数调整为维度二维信号,得到成像后二维复数矩阵s1与s2。
21、优选地,根据预设的阈值t,从成像后二维复数矩阵s1与s2中得到提取的二维矩阵sa1与sa2,具体包括以下步骤:
22、对成像后二维复数矩阵s1与s2的信号幅值进行归一化和转换,得到二维功率信号矩阵sp1与sp2;
23、根据预设的阈值t,从二维功率信号矩阵sp1与sp2中获取提取的二维矩阵sa1与sa2。
24、优选地,所述等效质心点的计算公式为:
25、
26、zct=zmax
27、式中:sa为提取的二维矩阵sa1与sa2,x为成像网格中x方向的坐标值序列,zmax为提取的二维矩阵sa1与sa2在z方向的幅值最大点。
28、优选地,所述方位向速度分量估计值的计算公式为:
29、
30、式中:vx为方位向速度分量估计值;t1与t2为方位时刻。
31、优选地,对两段连续方位时刻的雷达回波信号进行多普勒中心频率估计,得到回波信号多普勒中心频率的估计值,具体包括以下步骤:
32、将距离频域二维复数矩阵src1进行方位向傅里叶变换,得到变换后二维复数矩阵srd1;
33、将变换后二维复数矩阵srd1沿距离向进行叠加,得到一维矩阵sd1;
34、获取一维矩阵sd1的幅值最大值pmax1,设置幅值阈值为pmax1/2;将一维矩阵sd1模值中高于幅值阈值的部分设为1,低于幅值阈值的部分设为0,得到0-1序列g;
35、计算序列g计算在下标为i点的位置两侧幅值之和ei1与ei2;
36、根据位置两侧幅值之和ei1与ei2,计算得到能量差δe;
37、根据能量差δe和预设的误差范围阈值,得到回波信号多普勒中心频率的估计值。
38、优选地,所述多普勒频移的计算公式为:
39、fdp=fdc-fd0
40、式中:fdc为回波信号多普勒中心频率的估计值;fd0为根据雷达系统参数得到雷达运动产生的多普勒频率。
41、优选地,所述距离向速度分量估计值的计算公式为:
42、
43、式中:vz为距离向速度分量估计值;λ为系数。
44、优选地,所述方位向初始位置分量估计值的计算公式为:
45、
46、其中,x0为方位向初始位置分量估计值;a、b、c、k均为系数;b=-2vm(vm-vx)(xct1-kt1),
47、所述距离向初始位置分量估计值的计算公式为:
48、
49、式中:z0为距离向初始位置分量估计值。
50、本发明还提供一种基于等效质心的海面弱散焦动目标测速与定位的系统,包括:
51、获取模块,用于获取运动目标的两段连续方位时刻的雷达回波信号;
52、投影成像模块,用于根据后向投影成像算法,对两段连续方位时刻的雷达回波信号分别进行sar成像,得到成像后二维复数矩阵s1与s2;
53、提取模块,用于根据预设的阈值t,从成像后二维复数矩阵s1与s2中得到提取的二维矩阵sa1与sa2;
54、等效质心点计算模块,用于根据提取的二维矩阵sa1与sa2,计算得到等效质心点pct1(zct1,xct1)与pct2(zct2,xct2);
55、方位向速度估计模块,用于对等效质心点pct1(zct1,xct1)与pct2(zct2,xct2)进行方位向速度估计,得到方位向速度分量估计值;
56、多普勒中心频率估计模块,用于对两段连续方位时刻的雷达回波信号进行多普勒中心频率估计,得到回波信号多普勒中心频率的估计值;
57、多普勒频移计算模块,用于根据回波信号多普勒中心频率的估计值,计算得到多普勒频移;
58、距离向速度分量估计模块,用于根据方位向速度分量估计值和多普勒频移,得到距离向速度分量估计值;
59、初始位置估计模块,用于根据等效质心点pct1(zct1,xct1)与pct2(zct2,xct2)、方位向速度分量估计值和距离向速度分量估计值进行初始位置估计,得到方位向初始位置分量估计值和距离向初始位置分量估计值。
60、与现有技术相比,本发明的有益效果为:
61、(1)本发明提供的方法能够在不依赖于其他辅助手段的前提下,直接解决匀速运动目标sar图像散焦模糊难以定位的问题,且对原始sar图像不会造成任何影响;
62、(2)本发明提供的方法对飞行平台的性能要求低,不需要人工辅助点即可对海面运动目标实现测速与定位且参数估计结果较为准确。
- 还没有人留言评论。精彩留言会获得点赞!