一种离合器接合点检测方法及系统与流程
本发明涉及离合器测试,具体涉及一种离合器接合点检测方法及系统。
背景技术:
1、离合器是一种重要的传动器件,通常用于连接和断开发动机与传动系统之间的动力传递,在汽车和其它类型的机械设备中广泛应用。随着科技的发展,插电式混合驱动、纯电驱动等新型能源驱动的汽车在市场上逐渐增多,在新型能源驱动的汽车中,如插电式混合驱动汽车,具有电动机与内燃机两种不同的动力源,离合器接合点控制两种动力源的连接和断开,从而选择内燃机驱动、电动机驱动或两种同时驱动,即通过控制离合器接合点切换不同的动力源,实现不同的驱动方式。
2、对于混合驱动的汽车,为确保离合器能够在不同驱动方式下正确工作,以实现最佳的燃油效率和性能,需要对离合器的最佳接合点进行检测,传统的用于离合器接合点的检测方法通过压力传感器进行检测,能够在一定程度上检测到离合器的接合点,但由于压力传感器的零飘现象,即离合器执行液压缸内压力为零时,压力传感器读数不为零的情况,导致使用传统的用于离合器接合点检测的方法对离合器接合点的检测存在一定误差。
技术实现思路
1、本发明提供一种离合器接合点检测方法及系统,以解决压力传感器的零飘现象造成的离合器接合点检测误判的问题,所采用的技术方案具体如下:
2、第一方面,本发明一个实施例提供一种离合器接合点检测方法,该方法包括以下步骤:
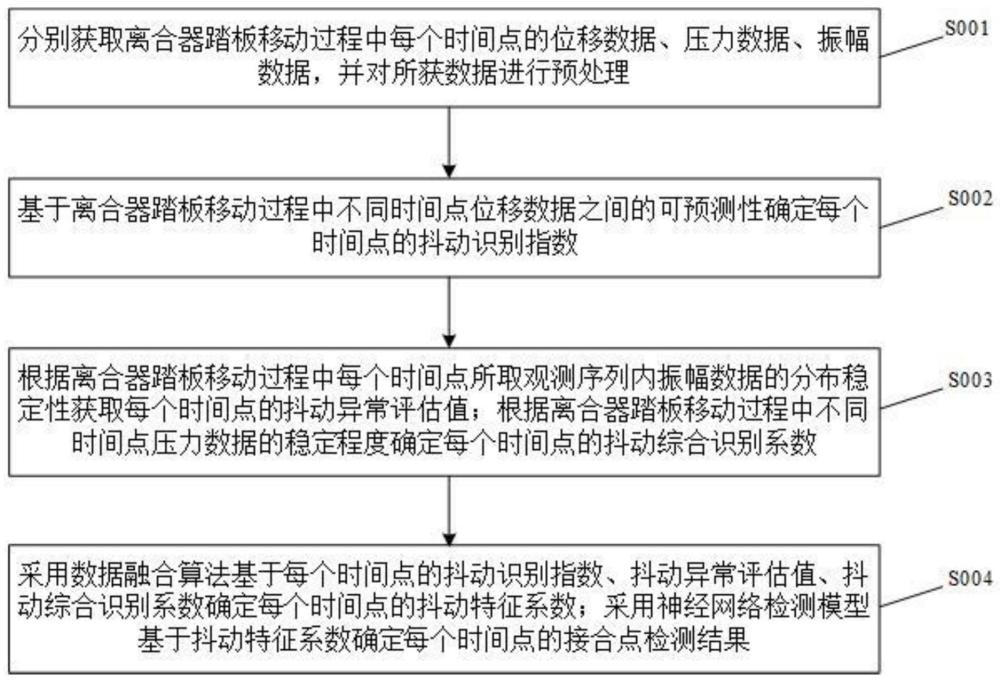
3、分别获取离合器踏板移动过程中每个时间点的位移数据、压力数据、振幅数据;
4、基于离合器踏板移动过程中不同时间点位移数据之间的可预测性确定每个时间点的抖动识别指数;
5、根据离合器踏板移动过程中每个时间点所取观测序列内振幅数据的分布稳定性获取每个时间点的抖动异常评估值;
6、根据离合器踏板移动过程中不同时间点压力数据的稳定程度确定每个时间点的抖动综合识别系数;
7、采用数据融合算法基于每个时间点的抖动识别指数、抖动异常评估值、抖动综合识别系数确定每个时间点的抖动特征系数;采用神经网络检测模型基于所述抖动特征系数确定离合器踏板移动过程中每个时间点的接合点检测结果。
8、优选的,所述基于离合器踏板移动过程中不同时间点位移数据之间的可预测性确定每个时间点的抖动识别指数的方法为:
9、基于离合器踏板移动过程中每个时间点与其历史时刻的短期位移预测序列之间的差异确定所述每个时间点的可预测指数;
10、基于离合器踏板移动过程中每个时间点与其历史时刻的位移数据之间的变化量确定所述每个时间点的异常波动指数;
11、每个时间点的抖动识别指数由所述每个时间点的可预测指数、异常波动指数两部分组成,其中,所述抖动识别指数与可预测指数成反比、与异常波动指数成正比关系。
12、优选的,所述基于离合器踏板移动过程中每个时间点与其历史时刻的短期位移预测序列之间的差异确定所述每个时间点的可预测指数的方法为:
13、采用预测算法基于离合器踏板移动过程中每个时间点的位移数据确定每个时间点的位移预测值;
14、将每个时间点预设数量个历史时间点的位移预测值按照时间顺序组成的序列作为每个时间点的位移预测序列;
15、获取每个时间点与其预设数量个历史时间点的位移预测序列之间度量距离的均值,将预设参数与所述均值之和的倒数作为每个时间点的可预测指数。
16、优选的,所述基于离合器踏板移动过程中每个时间点与其历史时刻的位移数据之间的变化量确定所述每个时间点的异常波动指数的方法为:
17、将每个时间点所取预设数量个历史时刻点组成的集合中任意两个相邻元素对应位移数据之间差值的绝对值作为分子,将所述集合中任意两个相邻元素对应位移数据中的最小值作为分母,将分子与分母的比值作为比例因子;
18、将比例因子的映射结果与预设参数之和的倒数作为第一距离值,将第一距离值在所述集合上累加结果的均值作为每个时间点的异常波动指数。
19、优选的,所述根据离合器踏板移动过程中每个时间点所取观测序列内振幅数据的分布稳定性获取每个时间点的抖动异常评估值的方法为:
20、将与每个时间点时间间隔最小的预设数量个时间点组成的序列作为每个时间点的观测序列;
21、将每个时间点的观测序列中所有元素对应振幅中的极大值、极小值组成的序列分别作为每个时间点的振幅峰值序列、振幅谷值序列;
22、根据每个时间点的观测序列内每个元素对应的振幅峰值序列、振幅谷值序列以及每个时间点的抖动识别指数确定每个时间点的抖动异常评估值。
23、优选的,所述根据每个时间点的观测序列内每个元素对应的振幅峰值序列、振幅谷值序列以及每个时间点的抖动识别指数确定每个时间点的抖动异常评估值的方法为:
24、将每个时间点的振幅谷值序列中所有元素的均值作为第一参考值,将每个时间点的振幅峰值序列中每个元素与第一参考值之间差值的绝对值作为分子,将分子与第一参考值的比值作为第一比例因子;
25、每个时间点的观测序列中所有元素对应的抖动识别指数的均值作为第二参考值,将每个时间点的振幅峰值序列中每个元素对应的抖动识别指数与第二参考值的差值绝对值作为第二比例因子;
26、将第一比例因子与第二比例因子的乘积在每个时间点的观测序列上累加结果的均值作为每个时间点的抖动异常评估值。
27、优选的,所述根据离合器踏板移动过程中不同时间点压力数据的稳定程度确定每个时间点的抖动综合识别系数的方法为:
28、将每个时间点所取观测序列内所有时间点的压力数据组成的序列作为每个时间点的压力观测序列;
29、采用数据拟合算法基于每个时间点的压力观测序列得到所述压力观测序列的拟合优度、斜率;采用序列分解算法基于每个时间点的压力观测序列得到所述压力观测序列的长期波动系数;
30、将所述压力观测序列的拟合优度与长期波动系数的映射结果的乘积作为分子,将所述压力观测序列的斜率与预设常数之和作为分母,将分子与分母的比值作为第二组成因子;
31、将每个时间点的抖动异常评估值与第二组成因子的乘积作为每个时间点的抖动综合识别系数。
32、优选的,所述采用数据融合算法基于每个时间点的抖动识别指数、抖动异常评估值、抖动综合识别系数确定每个时间点的抖动特征系数的方法为:
33、将离合器踏板移动过程中任意一个时间点的抖动识别指数、抖动异常评估值、抖动综合识别系数组成的向量作为一个行向量;将所有所述时间点对应的行向量组成的矩阵作为输入,采用熵权法分别得到抖动识别指数、抖动异常评估值、抖动综合识别系数三种参数的权重;
34、将每个时间点的抖动识别指数、抖动异常评估值、抖动综合识别系数作为输入,采用加权融合算法基于所述抖动识别指数、抖动异常评估值、抖动综合识别系数三种参数的权重得到每个时间点的抖动特征系数。
35、优选的,所述采用神经网络检测模型基于所述抖动特征系数确定离合器踏板移动过程中每个时间点的接合点检测结果的方法为:
36、将离合器踏板移动过程中预设数量个时间点的抖动特征系数作为输入,利用神经网络检测模型得到每个预测时刻离合器接合点的检测结果。
37、第二方面,本发明实施例还提供了一种离合器接合点检测系统,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述方法的步骤。
38、本发明的有益效果是:本发明通过分析离合器踏板移动过程中每个时间点位移数据的可预测性确定每个时间点的抖动识别指数;其次结合在离合器踏板移动过程中相邻时间点之间采集振幅数据的变化构建抖动异常评估值,用于反映离合器踏板达到接合点的可能性;并通过分析离合器踏板移动过程中离合器盘与压盘之间压力数据的稳定程度确定每个时间点的抖动综合识别系数,其次基于加权融合算法对抖动识别指数、抖动异常评估值、抖动综合识别系数进行融合,得到各时间点的抖动特征系数,抖动特征系数综合反映各时间点离合器达到接合点的可能程度,避免液压缸内压力为零而压力传感器读数不为零时,使用传统离合器接合点检测的方法存在的误差,提高了离合器接合点检测结果的准确率。
- 还没有人留言评论。精彩留言会获得点赞!