基于机会信号融合的飞行器定位方法及装置与流程
本公开涉及无线电导航,尤其涉及一种基于机会信号融合的飞行器定位方法及装置,可应用于在飞行器接收端接收到多个异构机会信号时,对多个异构机会信号进行融合并对飞行器位置进行定位的场景下。
背景技术:
1、基于全球卫星定位系统的定位、导航等技术已经发展成熟,机会信号导航成为全球卫星定位系统拒止状态下的一种有效的定位、导航技术手段。机会信号指存在于空间域中的各类无线电信号,具有不同的频段和传输介质。利用机会信号定位、导航大多是小范围进行的,通过接收环境中已有的多频段随机信号来实现。
2、目前利用机会信号定位的方法是当飞行器接收到多个机会信号时,对接收到的同构机会信号进行信号处理以实现通过机会信号导航。
3、但目前的利用机会信号定位的方法无法解决多个异构机会信号的处理问题,从而影响定位的准确性。
技术实现思路
1、本公开提供了一种基于机会信号融合的飞行器定位方法及装置,能够对飞行器接收端接收到多个异构机会信号进行融合,实现不改动原有同构机会信号机载导航设备下的信息融合,从而提高定位的准确性。
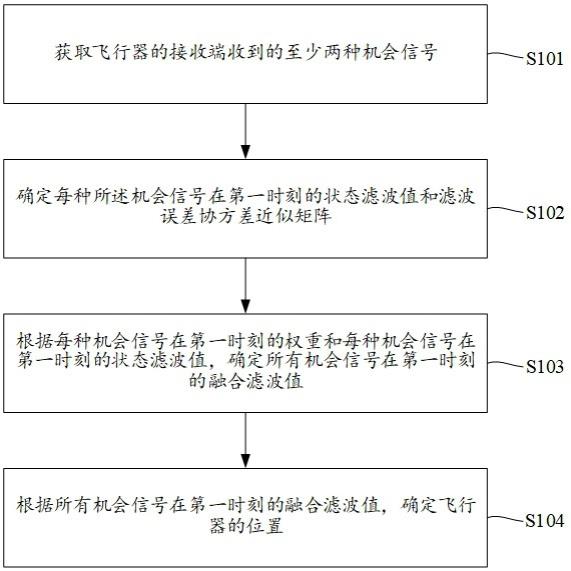
2、根据本公开的第一方面,提供了一种基于机会信号融合的飞行器定位方法,所述方法包括:获取飞行器的接收端收到的至少两种机会信号;确定每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵;根据每种机会信号在第一时刻的权重和每种机会信号在第一时刻的状态滤波值,确定所有机会信号在第一时刻的融合滤波值;根据所有机会信号在第一时刻的融合滤波值,确定飞行器的位置。
3、一些可能的实现方式中,确定每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵,包括:获取每种机会信号对应的机载定位设备在第二时刻的状态预报值和预报误差协方差近似矩阵,第二时刻为第一时刻之前的时刻;根据每种机会信号对应的机载定位设备在第二时刻的状态预报值,确定每种机会信号在第一时刻的状态预报值;根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵,确定每种机会信号在第一时刻的预报误差协方差近似矩阵;根据每种机会信号在第一时刻的测量值、每种机会信号对应的机载定位设备的滤波增益矩阵,对每种机会信号在第一时刻的状态预报值和预报误差协方差近似矩阵分别进行更新,得到每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵。
4、一些可能的实现方式中,确定每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵,包括:获取每种机会信号对应的机载定位设备在第二时刻的状态预报值和预报误差协方差近似矩阵,第二时刻为第一时刻之前的时刻;根据每种机会信号对应的机载定位设备在第二时刻的状态预报值,确定每种机会信号在第一时刻的状态预报值;根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵,确定每种机会信号在第一时刻的预报误差协方差近似矩阵;针对每种机会信号,将机会信号在第一时刻的状态预报值作为机会信号在第一时刻的状态滤波值,将机会信号在第一时刻的预报误差协方差近似矩阵作为机会信号在第一时刻的滤波误差协方差近似矩阵。
5、一些可能的实现方式中,根据每种机会信号对应的机载定位设备在第二时刻的状态预报值,确定每种机会信号在第一时刻的状态预报值,包括:根据每种机会信号对应的机载定位设备在第二时刻的状态预报值和状态更新矩阵的乘积,与控制增益矩阵的和,确定每种机会信号在第一时刻的状态预报值。
6、一些可能的实现方式中,根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵,确定每种机会信号在第一时刻的预报误差协方差近似矩阵,包括:根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵、状态更新矩阵、状态更新矩阵的转置矩阵的乘积,与过程噪声的协方差矩阵的和,确定每种机会信号在第一时刻的预报误差协方差近似矩阵。
7、一些可能的实现方式中,根据每种机会信号在第一时刻的测量值、每种机会信号对应的机载定位设备的滤波增益矩阵,对每种机会信号在第一时刻的状态预报值和预报误差协方差近似矩阵分别进行更新,得到每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵之前,方法还包括:针对每种机会信号对应的机载定位设备,确定机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵的转置矩阵、与机载定位设备中的机会信号在第一时刻的预报误差协方差近似矩阵的乘积,得到第一矩阵;确定机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵、机载定位设备中的机会信号在第一时刻的预报误差协方差近似矩阵、机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵的转置矩阵的乘积,与测量噪声的协方差矩阵的和,得到第二矩阵;确定第一矩阵和第二矩阵的比值,得到机载定位设备在第一时刻的卡尔曼增益矩阵,作为机载定位设备的滤波增益矩阵。
8、一些可能的实现方式中,根据每种机会信号在第一时刻的测量值、每种机会信号对应的机载定位设备的滤波增益矩阵,对每种机会信号在第一时刻的状态预报值和预报误差协方差近似矩阵分别进行更新,得到每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵,包括:针对每种机会信号,确定机会信号在第一时刻的测量值和机会信号在第一时刻的测量函数的第一差值;确定机会信号对应的机载定位设备的滤波增益矩阵与第一差值的第一乘积;确定机会信号对应的机载定位设备在第一时刻的状态预报值和第一乘积的和,得到机会信号在第一时刻的状态滤波值;确定机会信号的测量函数在第一时刻的雅克比矩阵和机会信号对应的机载定位设备的滤波增益矩阵的第二乘积;确定单位矩阵与第二乘积的第二差值;确定第二差值和机会信号在第一时刻的预报误差协方差近似矩阵的第三乘积,得到机会信号在第一时刻的滤波误差协方差近似矩阵。
9、一些可能的实现方式中,根据每种机会信号在第一时刻的权重和每种机会信号在第一时刻的状态滤波值,确定所有机会信号在第一时刻的融合滤波值,包括:按照每种机会信号在第一时刻的权重,对所有机会信号在第一时刻的状态滤波值进行求和,得到第一求和结果;对所有机会信号在第一时刻的权重进行求和,得到第二求和结果;确定第一求和结果和第二求和结果的比值,得到所有机会信号在第一时刻的融合滤波值。
10、一些可能的实现方式中,所述方法还包括:按照每种机会信号在第一时刻的权重,对所有机会信号在第一时刻的滤波误差协方差近似矩阵进行求和,得到第三求和结果;确定第三求和结果和第二求和结果的比值,得到所有机会信号在第一时刻的融合误差协方差近似矩阵。
11、本公开的第一方面至少具备如下有益效果:可以在飞行器接收端接收到多个异构机会信号时,对飞行器接收端接收到的多个异构机会信号进行融合,实现不改动原有同构机会信号机载导航设备下的信息融合,便于自由地增加或减少机载导航设备,避免整体机载导航设备的软硬件重置,从而提高定位的准确性和效率。
12、根据本公开的第二方面,提供了一种基于机会信号融合的飞行器定位装置,所述装置包括:获取单元、确定单元。
13、获取单元,用于获取飞行器的接收端收到的至少两种机会信号;
14、确定单元,用于确定每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵。
15、确定单元,还用于根据每种机会信号在第一时刻的权重和每种机会信号在第一时刻的状态滤波值,确定所有机会信号在第一时刻的融合滤波值。
16、确定单元,还用于根据所有机会信号在第一时刻的融合滤波值,确定飞行器的位置。
17、可选地,确定单元,具体用于获取每种机会信号对应的机载定位设备在第二时刻的状态预报值和预报误差协方差近似矩阵,第二时刻为第一时刻之前的时刻;根据每种机会信号对应的机载定位设备在第二时刻的状态预报值,确定每种机会信号在第一时刻的状态预报值;根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵,确定每种机会信号在第一时刻的预报误差协方差近似矩阵;根据每种机会信号在第一时刻的测量值、每种机会信号对应的机载定位设备的滤波增益矩阵,对每种机会信号在第一时刻的状态预报值和预报误差协方差近似矩阵分别进行更新,得到每种机会信号在第一时刻的状态滤波值和滤波误差协方差近似矩阵。
18、可选地,确定单元,具体用于获取每种机会信号对应的机载定位设备在第二时刻的状态预报值和预报误差协方差近似矩阵,第二时刻为第一时刻之前的时刻;根据每种机会信号对应的机载定位设备在第二时刻的状态预报值,确定每种机会信号在第一时刻的状态预报值;根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵,确定每种机会信号在第一时刻的预报误差协方差近似矩阵;针对每种机会信号,将机会信号在第一时刻的状态预报值作为机会信号在第一时刻的状态滤波值,将机会信号在第一时刻的预报误差协方差近似矩阵作为机会信号在第一时刻的滤波误差协方差近似矩阵。
19、可选地,确定单元,具体用于根据每种机会信号对应的机载定位设备在第二时刻的状态预报值和状态更新矩阵的乘积,与控制增益矩阵的和,确定每种机会信号在第一时刻的状态预报值。
20、可选地,确定单元,具体用于根据每种机会信号对应的机载定位设备中在第二时刻的预报误差协方差近似矩阵、状态更新矩阵、状态更新矩阵的转置矩阵的乘积,与过程噪声的协方差矩阵的和,确定每种机会信号在第一时刻的预报误差协方差近似矩阵。
21、可选地,确定单元,还用于针对每种机会信号对应的机载定位设备,确定机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵的转置矩阵、与机载定位设备中的机会信号在第一时刻的预报误差协方差近似矩阵的乘积,得到第一矩阵;确定机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵、机载定位设备中的机会信号在第一时刻的预报误差协方差近似矩阵、机载定位设备中的机会信号测量函数在第一时刻的雅克比矩阵的转置矩阵的乘积,与测量噪声的协方差矩阵的和,得到第二矩阵;确定第一矩阵和第二矩阵的比值,得到机载定位设备在第一时刻的卡尔曼增益矩阵,作为机载定位设备的滤波增益矩阵。
22、可选地,确定单元,具体用于针对每种机会信号,确定机会信号在第一时刻的测量值和机会信号在第一时刻的测量函数的第一差值;确定机会信号对应的机载定位设备的滤波增益矩阵与第一差值的第一乘积;确定机会信号对应的机载定位设备在第一时刻的状态预报值和第一乘积的和,得到机会信号在第一时刻的状态滤波值;确定机会信号的测量函数在第一时刻的雅克比矩阵和机会信号对应的机载定位设备的滤波增益矩阵的第二乘积;确定单位矩阵与第二乘积的第二差值;确定第二差值和机会信号在第一时刻的预报误差协方差近似矩阵的第三乘积,得到机会信号在第一时刻的滤波误差协方差近似矩阵。
23、可选地,确定单元,具体用于按照每种机会信号在第一时刻的权重,对所有机会信号在第一时刻的状态滤波值进行求和,得到第一求和结果;对所有机会信号在第一时刻的权重进行求和,得到第二求和结果;确定第一求和结果和第二求和结果的比值,得到所有机会信号在第一时刻的融合滤波值。
24、可选地,求和单元,用于按照每种机会信号在第一时刻的权重,对所有机会信号在第一时刻的滤波误差协方差近似矩阵进行求和,得到第三求和结果;确定单元,还用于确定第三求和结果和第二求和结果的比值,得到所有机会信号在第一时刻的融合误差协方差近似矩阵。
25、根据本公开的第三方面,提供了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面所述的方法。
26、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使计算机执行根据第一方面所述的方法。
27、根据本公开的第五方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据第一方面所述的方法。
28、本公开第二方面至第五方面所具备的有益效果可以参考第一方面所具备的有益效果,不再赘述。
29、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其他特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!