一种基于A-star及可视图的无人车全局路径规划算法的制作方法
本发明涉及地面无人车辆的自主避障及全局路径规划功能,具体涉及到一种基于a-star及可视图的无人车全局路径规划算法。
背景技术:
1、a-star算法简称a*算法,a-star算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法,算法中的距离估算值与实际值越接近,最终搜索速度越快,目前,以经典a-star算法设计的无人车全局路径规划算法,在进行索引节点遍历时向8个方向进行代价函数的迭代计算,算力消耗大,响应时间长,并不适用于无人车在复杂环境下的实时控制,且在路径规划中,障碍信息多以离散点坐标的形式表示,存储量大,遍历节点数多,更加影响响应时间。
技术实现思路
1、针对上述问题,本发明提供一种基于a-star及可视图的无人车全局路径规划算法。
2、解决上述技术问题的技术方案如下:
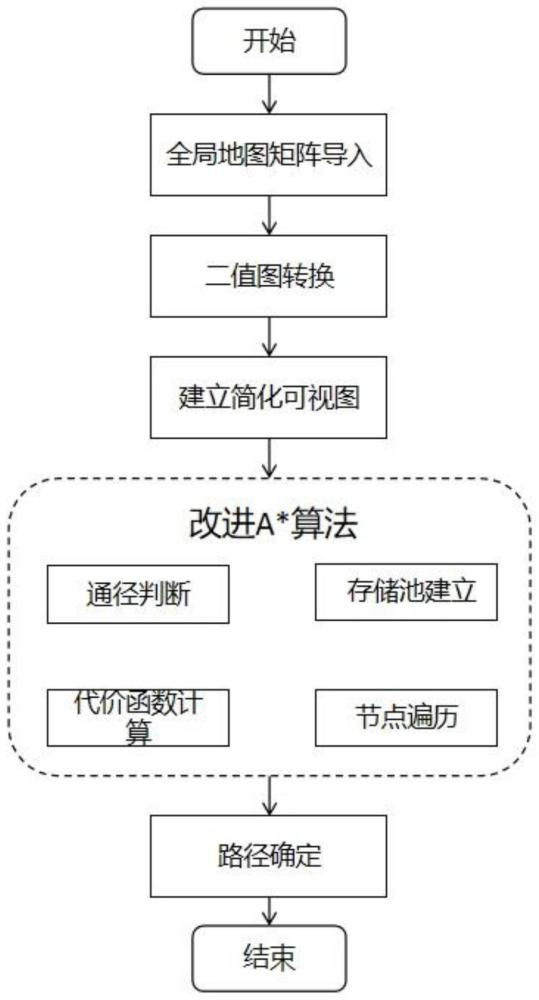
3、一种基于a-star及可视图的无人车全局路径规划算法,包括以下步骤:
4、s1,通过车辆外部传感器和图像处理控制器获得一张包含障碍信息及可行驶区域信息的全局地图矩阵;
5、s2,将s1获得的全局地图矩阵转换为二值图的格式,使全局地图矩阵中的数值只区分为障碍与可行驶区域信息;
6、s3,将全局地图矩阵进行连通体分析,获得图中各连通体的突多边形点坐标及重心坐标;
7、s4,分别对s4中获得的各连通体的凸多边形点坐标进行连线,以获得一个包含点坐标及连线的简化可视图;
8、s5,通过车辆当前坐标位置及目标终点坐标位置后,利用a-star算法在简化可视图中规划出一条最优路径。
9、进一步地,所述s1中获得的全局地图是以rgb24格式存储的图像。
10、进一步地,所述s2中,将获得的全局地图矩阵转换为二值图的格式后,二值图中值为1的表示障碍,值为0的表示可行驶区域。
11、进一步地,所述s5中,a-star算法为改进后的a-star算法,改进后的a-star算法由经典a-star算法中向8个方向进行迭代计算代价函数改进为:只向索引节点与终点所连直线遇到的第一个突多边形的两个切点坐标进行迭代计算代价函数,当遍历的索引节点为终点坐标时停止算法迭代,并选取代价函数和值最小的路径输出。
12、本发明的有益效果是:本发明提供的一种基于a-star及可视图的无人车全局路径规划算法解决了a-star算法在进行全局路径规划时消耗大量算力的问题,解决了全局路径规划中响应慢的问题,在地图信息发生变化时,快速的响应可以实现路径动态规划,实时规划路径。
技术特征:
1.一种基于a-star及可视图的无人车全局路径规划算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于a-star及可视图的无人车全局路径规划算法,其特征在于,所述s1中获得的全局地图是以rgb24格式存储的图像。
3.根据权利要求1所述的一种基于a-star及可视图的无人车全局路径规划算法,其特征在于,所述s2中,将获得的全局地图矩阵转换为二值图的格式后,二值图中值为1的表示障碍,值为0的表示可行驶区域。
4.根据权利要求1所述的一种基于a-star及可视图的无人车全局路径规划算法,其特征在于,所述s5中,a-star算法为改进后的a-star算法,改进后的a-star算法由经典a-star算法中向8个方向进行迭代计算代价函数改进为:只向索引节点与终点所连直线遇到的第一个突多边形的两个切点坐标进行迭代计算代价函数,当遍历的索引节点为终点坐标时停止算法迭代,并选取代价函数和值最小的路径输出。
技术总结
本发明公开一种基于A‑star及可视图的无人车全局路径规划算法,包括:S1,通过车辆外部传感器和图像处理控制器获得一张包含障碍信息及可行驶区域信息的全局地图矩阵;S2,将全局地图矩阵转换为二值图的格式,使全局地图矩阵中的数值只区分为障碍与可行驶区域信息;S3,将全局地图矩阵进行连通体分析,获得图中各连通体的突多边形点坐标及重心坐标;S4,分别对S4中获得的各连通体的凸多边形点坐标进行连线,以获得一个包含点坐标及连线的简化可视图;S5,通过车辆当前坐标位置及目标终点坐标位置后,利用A‑star算法在简化可视图中规划出一条最优路径。本发明解决了A‑star算法在进行全局路径规划时消耗大量算力的问题,同时还解决了全局路径规划中响应慢的问题。
技术研发人员:鲜洲,田雪勇,张婉云
受保护的技术使用者:重庆长安工业(集团)有限责任公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!