一种基于线结构光的高反光钢铁板材几何尺寸测量方法
本发明设计图像处理,尤其涉及一种基于线结构光的高反光钢铁板材几何尺寸测量方法。
背景技术:
1、整个钢铁生产的过程由多道连续工序生产完成,在多个环节都需要准确的物料数据,不论是连铸过程中的钢坯定长定宽,还是在轧钢过程中的定型定长定宽,亦或是在成品钢材最后的品保检查中,都需要精确的获取钢材的尺寸数据。
2、目前钢铁行业常规的测长方式主要有两种,一种是通过编码器来进行定长定宽,但是由于厚板重量较大存在打滑的问题,所以会导致厚板的长度、宽度容易出现测量误差;另一种方式是激光测距,这种方法在测量过程中存在不稳定的情况,容易出现碰撞或数据波动等问题。
3、目前的计算机视觉方法旨在通过不同的移动设备处理捕获的图像,并使其获得高层次的理解。在现实世界中,通过玻璃拍摄的图像通常包含不良反射。这些反射不仅会破坏图像内容,还会影响视觉跟踪、目标检测和视频分析等计算机视觉任务的性能。
4、现有的单幅图像反射去除方法依赖于梯度稀疏性先验,它们的能力也受到了限制。在大多数计算机视觉场景中,人类视觉系统对单幅图像的背景层具有很强的敏感性。此外,单反射去除一般来说是困难的。
5、当前,去除不需要的反射已成为解决人类视觉和计算机对高质量图像处理的基本任务。多幅图像的反射去除相对于单幅图像而言,具有较少的病态性和更好的性能效果,但单幅图像的反射去除任务由于其在日常生活中的实用性而备受研究人员的关注。因此,为了解决现有技术中的问题,需要一种基于结构--纹理分层的高反光钢板表面线结构光几何尺寸测量方法。
技术实现思路
1、本发明的目的在于提供一种基于线结构光的高反光钢铁板材几何尺寸测量方法,通过采用结构-纹理策略将图像分解为结构层和纹理层,处理两层中的反射去除,并进一步抑制了纹理层中的阻塞伪影;最后,采用融合处理得到结果图像。该方法可提高工厂生产效率,提升产品精度,实现高效生产。
2、一种基于线结构光的高反光钢铁板材几何尺寸测量方法,包括以下步骤:
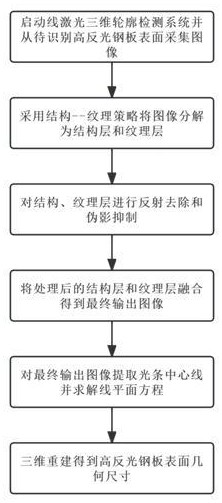
3、步骤1:启动线激光三维轮廓检测系统并从待识别高反光钢板表面采集图像;
4、调整相机1与激光器2的位姿,使激光线位于辊道中心位置且保持水平,同时使相机视野能够观察到五个转动辊,并使采集到的图像中激光线水平;
5、将待识别高反光钢铁板材3水平放置在视野范围之外的辊道4表面上,使钢铁板材与辊道相平齐,启动辊道,使金属板材以恒定较低速率沿另一侧运输;
6、在相机监控窗口,通过设置roi区域,观察图像中钢铁板材实时位置,当钢铁板材的一侧被激光线穿过时开始进行拍照,直至钢铁板材的尾端穿过激光线,所拍照片均保存在计算机操控界面对应的文件夹中。
7、步骤2:对采集到的图片基于结构--纹理策略,将图像分解为结构层和纹理层;
8、从保存图片的文件夹中获取不同时刻的图像,计算输入图像与其结构层之差获得纹理层:
9、其中,为输入图像,为输入图像的结构层,为输入图像的纹理层;
10、步骤3:对结构、纹理层进行反射去除和伪影抑制;
11、在分解之后,移除反射并直接抑制工件,然后创建一个掩模m,将区域与剩余区域分开,以保留更多细节,进一步抑制阻塞伪影;
12、步骤4:将处理后的结构层和纹理层融合得到最终输出图像;
13、在恢复了结构层和纹理层之后,由于结构图像保留了较强的结构,并过度平滑了细节,通过结合bf和wls两种边缘保持滤波器来增强结构层,并与经过反射去除和伪影抑制后的纹理层结合得到最终输出图像;
14、步骤5:对最终输出图像提取光条中心线并求解线平面方程;
15、步骤6:三维重建得到高反光金属表面三维点云数据,实现钢板表面几何尺寸的精确识别与测量。
16、优选的,步骤2中,所述基于结构--纹理策略将图像分解为结构层和纹理层的具体方法为:
17、基于固有变差和相对总变差测度的全变差图像重构公式,将输入图像分解为结构层和纹理层,目标函数建模为:
18、;式中,为输入图像,为梯度,表示二维像素;
19、在解决问题的过程中,为了保证去噪后的图像与原图像差距不会过大,增加保真项,将结果变为:
20、;式中,为输入图像,为梯度,表示二维像素,数据项指与输入图像相似的提取结构,该式的第二项是用于从图像中去除纹理层的正则化项,其中和是像素在和方向上的总变量,是松弛因子,调节保真项与梯度的占比。
21、优选的,步骤3中,所述结构、纹理层的反射去除具体方法为:
22、建立反射去除模型:;式中,为结构或纹理的输入图像,为背景层,为反射层,为两层间混合矩阵,为高斯模糊核;;
23、目标函数定义为:式中,为图像的数据保真项,为对输入施加梯度阈值,为实验条件所设系数;
24、其中,
25、式中,和分别代表输入图像在x和y方向的像素值;
26、第一项是数据保真项,通过对输入图像采用梯度阈值,并基于拉普拉斯的数据保真度项更好地增强了背景层中精细细节结构的一致性;第二项则是为了保证解的唯一性。
27、优选的,步骤3中,所述纹理层的伪影抑制具体方法为:
28、首先引入dct域的滤波算法,并定义块和,为8*8图像的块,是的dct系数,为位移后的块,其位移像素为o,位移方向为x,位移p像素在y方向去抑制,和是块的dct系数;
29、采用dct域滤波对数据块进行修正,得到新的dct系数:;
30、定义dct域的过滤器=1,该过滤器提供了图像细节区域。
31、优选的,步骤4中,所述结构层和纹理层融合得到最终输出图像包括以下步骤:
32、(1)对于结构层,采用基于bf和wls的分解来提取图像细节,去两者之间的平均值,最终结构输出图像表示为:
33、;式中,为最终结构输出层,为经wls滤波器过滤后的结果,为经bf滤波器过滤后的结果;
34、(2)对于纹理层,其最终输出图像表示为:
35、;表示取出反射和遮挡伪影后的纹理层;
36、(3)恢复结构层和纹理层后,最终输出图像表示为:
37、;式中为最终输出图像,为最终纹理层输出图像,为最终结构层输出图像。
38、优选的,步骤5中,在获得最终输出图像后,还需对辊道表面进行相机1标定、相机与激光器2形成的光平面标定,得到辊道上方相机拍摄后照片中每一点代表的像素坐标与对应辊道表面实际现场中的世界坐标之间的对应关系;在标定完成后,对最终输出图像使用灰度重心法提取光条纹中心线,经过光条纹骨架特征点提取算法可得到光条中心线二维特征点;
39、优选的,步骤6中,利用步骤5中灰度重心法得到线结构光与金属器件相交时光条中心线二维特征点,同时相机的内外参数通过相机标定获得,光条中心的激光器坐标系下像素点坐标可知,通过两者计算获得该特征点的三维坐标,进一步获得金属零件表面的三维点云集,实现金属零件表面的三维重建。
40、本发明具有以下有益效果:
41、(1)本发明首先提出了一个统一的框架,同时处理反射去除和伪影抑制;
42、(2)本发明的框架利用结构-纹理分解来去除图像反射去除操作中引入的额外伪影;
43、(3)与之前的单幅图像反射去除方法相比,本发明可以在保留更多细节的同时去除反射和阻塞工件。
- 还没有人留言评论。精彩留言会获得点赞!