基于无人机巡检的建筑表观损伤定位方法与流程
本申请涉及建筑损伤定位领域,尤其涉及基于无人机巡检的建筑表观损伤定位方法。
背景技术:
1、建筑表观损伤定位方法是建筑损伤定位领域中的关键技术,建筑群表面的损伤定位需要使用建筑表观损伤定位方法,其中,精确、高效地定位损伤位置对后续的修缮工作极为重要。
2、在现有技术中,由于无人机拍摄的照片以墙面为主,照片的数量非常庞大且相似,而且照片本身缺少空间信息,导致难以判断损伤在建筑群中的具体位置。
3、上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本申请的主要目的在于提供一种基于无人机巡检的建筑表观损伤定位方法,旨在解决损伤识别模块很难判断损伤在建筑群中的具体位置的技术问题。
2、为实现上述目的,本申请提供一种基于无人机巡检的建筑表观损伤定位方法,所述建筑表观损伤定位方法包括以下步骤:
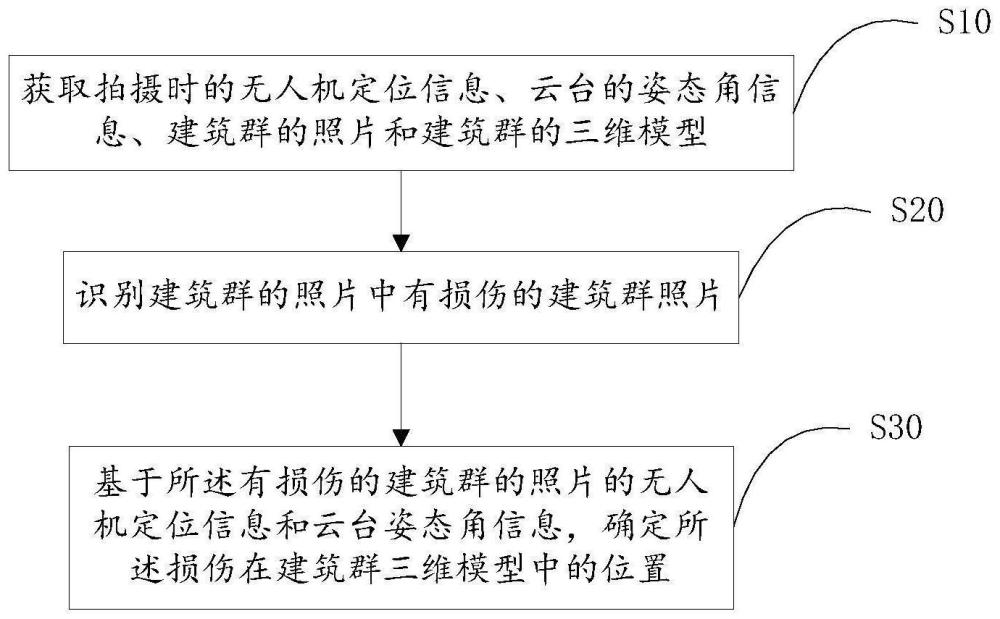
3、获取拍摄时的无人机定位信息、云台姿态角信息、建筑群的照片和建筑群的三维模型;
4、识别建筑群的照片中有损伤的建筑群照片;
5、基于所述有损伤的建筑群的照片的无人机定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置。
6、可选地,所述识别建筑群的照片中有损伤的建筑群照片的步骤,包括:
7、读取建筑群的照片,将所述照片输入预设的损伤识别模块;
8、若所述照片的建筑群有表观损伤,则判断所述照片为有损伤的建筑群的照片,并返回读取建筑群的照片,将所述照片输入预设的损伤识别模块的步骤;
9、若所述照片的建筑群没有表观损伤,则判断所述照片为无损伤的建筑群的照片。
10、可选地,所述基于所述有损伤的建筑群的照片的无人机定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置的步骤,包括:
11、将所述照片的定位信息、云台姿态角信息和建筑群的三维模型转换到同一个坐标系下;
12、基于所述照片的定位信息和云台姿态角信息,获取定位图像;
13、基于所述定位图像,确定损伤的位置坐标;
14、将所述损伤的位置坐标标注在建筑群的三维模型上。
15、可选地,所述基于所述照片的定位信息和云台姿态角信息,获取定位图像的步骤,包括:
16、基于所述照片的定位信息和云台姿态角信息,在三维模型中对建筑群进行拍摄,得到虚拟图像;
17、将所述虚拟图像中的像素点转换为三维模型中的坐标信息,并将所述坐标信息组合,得到定位图像。
18、可选地,所述基基于所述定位图像,确定损伤的位置坐标的步骤,包括:
19、将所述定位图像与照片进行匹配,得到匹配完成的照片;
20、将匹配完成的照片映射在定位图像中,读取所述损伤与定位图像差异部分的坐标信息;
21、将所述坐标信息输出为损伤的位置坐标。
22、可选地,所述将所述定位图像与照片进行匹配,得到匹配完成的照片的步骤,包括:
23、提取所述定位图像的特征点和所述照片的特征点,并进行配准,得到定位图像;
24、以所述定位图像的中心点为基点,将所述定位图像与照片的特征点进行匹配,得到匹配完成的照片。
25、可选地,所述基于所述有损伤的建筑群的照片的无人机定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置的步骤之后,所述方法包括:
26、判断是否还有未确定损伤的图片;
27、若有未确定损伤的图片,则返回获取拍摄时照片的定位信息、云台姿态角信息、建筑群的照片和建筑群的三维模型的步骤;
28、若无未确定损伤的图片,则将标记了损伤位置的建筑群三维模型进行可视化展示,以供用户了解损伤在建筑群中的分布情况。
29、此外,为实现上述目的,本申请还提供一种建筑表观损伤定位装置,所述装置包括:
30、获取模块,用于获取拍摄时照片的定位信息、云台姿态角信息、建筑群的照片和建筑群的三维模型;
31、识别模块,用于识别建筑群的照片中有损伤的建筑群照片;
32、定位模块,用于基于所述有损伤的建筑群的照片的定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置。
33、此外,为实现上述目的,本申请还提供一种建筑表观损伤定位设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的建筑表观损伤定位程序,所述建筑表观损伤定位程序配置为实现如上所述的建筑表观损伤定位方法的步骤。
34、此外,为实现上述目的,本申请还提供一种存储介质,所述存储介质上存储有建筑表观损伤定位程序,所述建筑表观损伤定位程序被处理器执行时实现如上所述的建筑表观损伤定位方法的步骤。
35、本申请提供一种基于无人机巡检的建筑表观损伤定位方法,与相关技术中照片本身缺少空间信息,导致损伤识别模块很难判断损伤在建筑群中的具体位置相比,本申请通过获取拍摄时的无人机定位信息、云台姿态角信息、建筑群的照片和建筑群的三维模型,然后识别建筑群的照片中有损伤的建筑群照片,最后基于所述有损伤的建筑群的照片的无人机定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置,可以理解,本申请基于有损伤的建筑群的照片的定位信息和云台的姿态角信息,确定所述损伤在建筑群三维模型中的位置,解决了难以判断损伤在建筑群中的具体位置的问题。
技术特征:
1.一种基于无人机巡检的建筑表观损伤定位方法,其特征在于,所述建筑表观损伤定位方法包括以下步骤:
2.如权利要求1所述的建筑表观损伤定位方法,其特征在于,所述识别建筑群的照片中有损伤的建筑群照片的步骤,包括:
3.如权利要求1所述的建筑表观损伤定位方法,其特征在于,所述基于所述有损伤的建筑群的照片的无人机定位信息和云台的姿态角信息,确定所述损伤在建筑群三维模型中的位置的步骤,包括:
4.如权利要求3所述的建筑表观损伤定位方法,其特征在于,所述基于所述照片的定位信息和云台的姿态角信息,获取定位图像的步骤,包括:
5.如权利要求3所述的建筑表观损伤定位方法,其特征在于,所述基于所述定位图像,确定损伤的位置坐标的步骤,包括:
6.如权利要求5所述的建筑表观损伤定位方法,其特征在于,所述将所述定位图像与照片进行匹配,得到匹配完成的照片的步骤,包括:
7.如权利要求1所述的建筑表观损伤定位方法,其特征在于,所述基于所述有损伤的建筑群的照片的无人机定位信息和云台姿态角信息,确定所述损伤在建筑群三维模型中的位置的步骤之后,所述方法包括:
8.一种建筑表观损伤定位装置,其特征在于,所述装置包括:
9.一种建筑表观损伤定位设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的建筑表观损伤定位程序,所述建筑表观损伤定位程序配置为实现如权利要求1至7中任一项所述的建筑表观损伤定位方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有建筑表观损伤定位程序,所述建筑表观损伤定位程序被处理器执行时实现如权利要求1至7中任一项所述的建筑表观损伤定位方法的步骤。
技术总结
本申请公开了一种基于无人机巡检的建筑表观损伤定位方法,属于建筑损伤定位技术领域。本申请通过获取拍摄时的无人机定位信息、云台的姿态角信息、建筑群的照片和建筑群的三维模型,然后识别建筑群的照片中有损伤的建筑群照片,最后基于所述有损伤的建筑群的照片的无人机定位信息和云台的姿态角信息,确定所述损伤在建筑群三维模型中的位置,本申请使得损伤识别模块可以确定损伤在建筑群中的具体位置。
技术研发人员:金楠,范存君,岳清瑞,施钟淇,伍永靖邦
受保护的技术使用者:深圳市城市公共安全技术研究院有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!