一种激光自检装置及控制方法与流程
本发明涉及激光自检,特别涉及一种激光自检装置及控制方法。
背景技术:
1、随着搬运机器人和汽车自动驾驶技术的大力发展和广泛应用,大量的360°激光扫描头外设得以被应用,激光外设具有精确度高、方向性强以及体积小等特点,被广泛应用在定位功能和防撞功能上。
2、但在现有技术中,自动导向车行走在空旷的场所中,无反射物反射激光扫描装置发出的激光和激光光路出现异常无法正确检测时,两者情况是一致的,均表现为没有接收到反射光,从而没有检测到激光扫描装置至障碍物的距离信号。若不对上述两种情况加以区分,在光路出现异常时,自动导向车以无障碍物的状态运行,则极易发生事故,从而给设备和人员带来极大的安全问题。
技术实现思路
1、本发明的目的是提供一种激光自检装置及控制方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本发明解决其技术问题的解决方案是:提供一种激光自检装置及控制方法。
3、根据本发明的第一方面的实施例,提供了一种激光自检装置,包括:
4、自动导向车;
5、激光设备,安装于自动导向车上,用于发出扫描光路,所述扫描光路形成扫描范围;
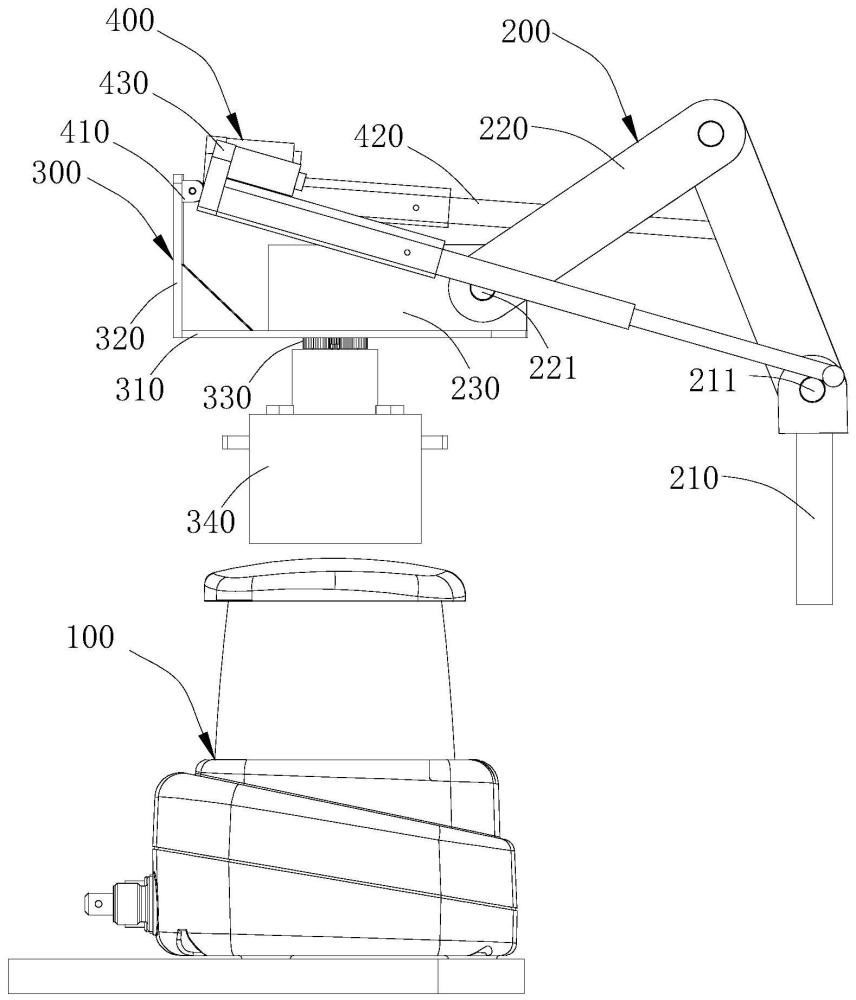
6、测试臂,安装于旋转平台上,用于伸展至所述扫描范围内;
7、旋转平台,安装于所述激光设备的上方,用于驱动所述测试臂水平旋转,以将所述测试臂旋转至所设测试角度;
8、伸缩机构,固定于所述旋转平台上,并与所述测试臂连接,用于驱动所述测试臂伸缩,以将所述测试臂伸展至所设测试距离;
9、自检模块,分别与激光设备和自动导向车连接。
10、进一步,所述测试臂包括:
11、测试杆,设有第一转轴,所述第一转轴与所述伸缩机构连接,所述伸缩机构通过所述第一转轴带动所述测试杆伸展至所设测试距离;
12、伸展臂,分别与所述伸缩机构和所述第一转轴连接,所述伸展臂设有第二转轴;
13、舵机,水平安装于所述旋转平台上,与所述第二转轴连接,用于驱动所述第二转轴转动,以带动所述伸展臂伸展。
14、进一步,所述旋转平台包括:
15、底板,用于安装所述测试臂;
16、侧板,设置于所述底板上,用于固定所述伸缩机构;
17、旋转转轴,与所述底板的底部连接;
18、水平数字舵机,安装于所述激光设备的上方,并与所述旋转转轴连接,用于驱动所述旋转转轴水平旋转,以带动所述底板水平旋转。
19、进一步,所述伸缩机构包括:
20、第一电动推杆,与所述伸展臂连接;
21、第二电动推杆,与所述第一转轴连接,用于推拉所述第一转轴,以带动所述测试杆至所设测试距离;
22、固定座,固定于所述旋转平台上,分别与所述第一电动推杆和第二电动推杆连接。
23、进一步,一种激光自检装置还包括:通信模块;所述通信模块分别与所述自检模块、所述激光设备和自动导向车连接,所述自检模块通过所述通信模块分别与所述激光设备和自动导向车通信。
24、根据本发明的第二方面的实施例,提供了一种激光自检装置的控制方法,应用于本发明的第一方面的实施例所述的一种激光自检装置,所述控制方法包括:
25、判断激光设备是否发出扫描光路,并得到位置信息;
26、若否,则控制伸缩机构驱动测试臂伸展,并控制旋转平台驱动所述测试臂旋转至扫描范围内;
27、当所述激光设备检测到所述测试臂的位置信息时,则排除扫描光路存在故障。
28、进一步,在所述控制伸缩机构驱动测试臂伸展前,还包括:
29、控制所述伸缩机构驱动所述测试臂顺时针转动,并获取所述测试臂的转动数据和所述伸缩机构的伸展数据;
30、根据所述伸展数据和所述转动数据,判断所述测试臂是否伸展至所设测试距离;
31、若否,则认为所述测试臂存在异常,自动导向车发出报警信号,并停止移动。
32、进一步,在所述控制旋转平台驱动所述测试臂旋转至扫描范围内前,还包括:
33、控制所述旋转平台顺时针转动,获取旋转角度,根据所述旋转角度,判断当前所述旋转平台是否正常转动;
34、若否,则认为所述旋转平台存在异常,自动导向车发出报警信号,并停止移动。
35、进一步,所述判断当前所述旋转平台是否正常转动,还包括:
36、当当前所述旋转平台为正常转动时,根据所述旋转角度,判断当前所述旋转平台是否已完成顺时针360°旋转;
37、若否,则继续控制所述旋转平台顺时针转动。
38、进一步,所述根据所述伸展数据和所述转动数据,判断所述测试臂是否伸展至所设测试距离具体包括:
39、根据所述转动数据和所述伸展数据,计算所述测试臂的移动距离;
40、判断所述移动距离和所设测试距离是否一致;
41、若是,则认为所述测试臂伸展至所设测试距离。
42、本发明的有益效果是:通过旋转平台和伸缩机构对测试臂的调节,将测试臂伸展至激光设备的扫描范围中,当激光设备能够检测到测试臂的位置信息时,则确认自动导向车处在无障碍物的区域中,反之则激光设备发出的扫描光路存在故障。与现有技术中仅靠内部电路进行自检相比,本申请通过辅助机构,简单明了地区分扫描光路上无反射物反射和扫描光路异常的情况。
技术特征:
1.一种激光自检装置,其特征在于,包括:
2.根据权利要求1所述的一种激光自检装置,其特征在于,所述测试臂包括:
3.根据权利要求1所述的一种激光自检装置,其特征在于,所述旋转平台包括:
4.根据权利要求2所述的一种激光自检装置,其特征在于,所述伸缩机构包括:
5.根据权利要求1所述的一种激光自检装置,其特征在于,还包括:通信模块;所述通信模块分别与所述自检模块、所述激光设备和自动导向车连接,所述自检模块通过所述通信模块分别与所述激光设备和自动导向车通信。
6.一种激光自检装置的控制方法,其特征在于,应用于权利要求1至5中任一项所述的一种激光自检装置,所述方法包括:
7.根据权利要求6所述的一种激光自检装置的控制方法,其特征在于,在所述控制伸缩机构驱动测试臂伸展前,还包括:
8.根据权利要求6所述的一种激光自检装置的控制方法,其特征在于,在所述控制旋转平台驱动所述测试臂旋转至扫描范围内前,还包括:
9.根据权利要求8所述的一种激光自检装置的控制方法,其特征在于,所述判断当前所述旋转平台是否正常转动,还包括:
10.根据权利要求7所述的一种激光自检装置的控制方法,其特征在于,所述根据所述伸展数据和所述转动数据,判断所述测试臂是否伸展至所设测试距离具体包括:
技术总结
本发明公开了一种激光自检装置及控制方法,包括:自动导向车、激光设备、测试臂、旋转平台、伸缩机构和自检模块。通过旋转平台和伸缩机构对测试臂的调节,将测试臂伸展至激光设备的扫描范围中,当激光设备能够检测到测试臂的位置信息时,则确认自动导向车处在无障碍物的区域中,反之则激光设备发出的扫描光路存在故障。与现有技术中仅靠内部电路进行自检相比,本申请通过辅助机构,简单明了地区分扫描光路上无反射物反射和扫描光路异常的情况。
技术研发人员:张明智,杨显洁,夏应文
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!