一种基于USBL与SINS/GPS系统的近海海底电缆定位方法与流程
本发明涉及海底电缆定位领域,尤其涉及一种基于usbl与sins/gps系统的近海海底电缆定位方法。
背景技术:
1、近年来,随着海岛经济的迅速发展,以及海上风力发电、石油平台等大规模开发,海底电缆敷设数量快速增加,成为海岛经济、海洋科技等产业的发展和提升的“生命线”。
2、现阶段,海缆施工和运维面临以下两个问题:一是在施工过程中,对于电缆在水下的一些施工器械的准确位置和电缆的准确位置,实际上比较难判别,且存在较多的影响因素;二是海缆在浅滩环境下,存在着“人下不去,船上不来”的窘状,对近海浅滩处海缆的施工和运维造成了较大影响。
3、因此,开发自动化,智能化的水下作业技术成为一种必然,而想要实现自动化、智能化的水下作业,首先需要实现对水下目标的精确定位。水声定位具有传播距离长、衰减损耗小的特点。特别是超短基线(usbl)还具有体积小、易于布局的特点,因此,大多采用usbl搭配捷联惯性导航系统(sins)对水下目标进行定位。
4、在采用的组合定位系统安装过程中,usbl安装在六自由度稳定装置而非船底,且该装置为分层结构,共上下两层,能够更灵活的改变usbl的角度,但也带来了较大的安装误差,存在的安装误差会对定位的整体精度造成较大影响。现迫切需要对安装误差进行校正,从而对水下海底电缆实现准确定位。
技术实现思路
1、本发明要解决的技术问题和提出的技术任务是对现有技术方案进行完善与改进,提供一种基于usbl与sins/gps系统的近海海底电缆定位方法,以达到对近海海底电缆准确定位的目的。为此,本发明采取以下技术方案。
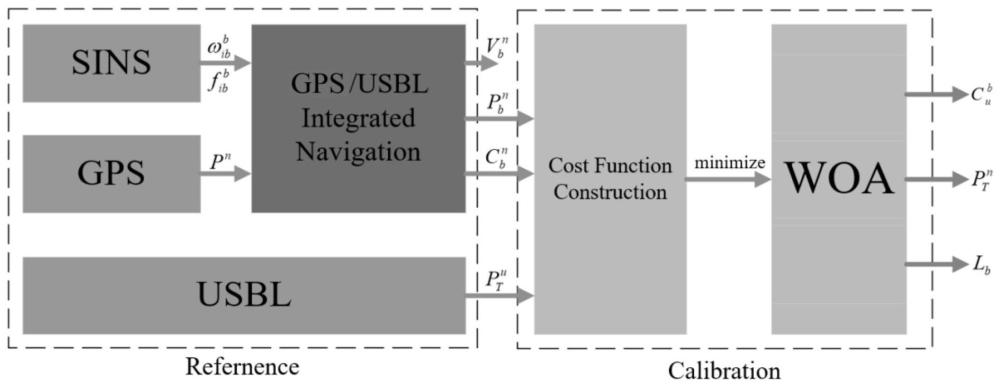
2、一种基于usbl与sins/gps系统的近海海底电缆定位方法,包括以下步骤:
3、通过usbl测量值计算出海底应答器相对于usbl的位置信息通过gps/usbl组合导航系统求解出sins在n系的位置和sins的姿态矩阵
4、根据海底应答器相对于usbl的位置信息sins在n系的位置和sins的姿态矩阵对待估计的系统安装参数问题构造代价函数;
5、通过鲸鱼优化算法对代价函数最小化,求解待估计的系统安装参数的最优解,完成对安装误差的校正;
6、根据系统安装参数计算海底电缆信标位置,以对近海海底电缆定位。
7、在本技术方案中,sins坐标系定义为坐标系b,地球坐标系定义为坐标系n,usbl坐标系定义为u;n系便是地球坐标系。鲸鱼优化算法是一种基于种群的优化技术,其动机是模拟座头鲸狩猎行为,采用随机或最佳搜索代理来模拟捕猎行为,并使用螺旋来模拟座头鲸的泡泡网攻击机制。本技术方案在安装误差整定阶段基于鲸鱼优化算法(woa)对超短基线(usbl)与捷联惯导(sins)/全球定位系统(gps)组合定位系统安装误差进行最优化求解,其中,sins/gps系统直接安装在船只上,usbl安装在一个船用的六自由度稳定装置上;同时将信标相对于usbl换能器的位置统一归算到地球坐标系,实现对海底电缆的精确定位;通过改进的鲸鱼优化算法辅助方法来识别sins/usbl的系统安装误差。该方法通过最小化成本函数和消除对基于分离的校准方法的额外要求,实现了系统安装误差的统一校准。此技术方案利用usbl和sins/gps的互补性,提高定位精度和稳定性,为水下组合定位系统安装误差校正与海缆定位提供了重要参考。
8、作为优选技术手段:usbl定位系统包括声学阵列和声学信标;声学阵列包括声换能器和水听器,声换能器和水听器预先被精确测量并固定在六自由度稳定平台上;声学信标为部署在海床上的应答器;水听器通过tdoa获得相应的单程走时和斜距。通过使用声学阵列和声学信标,usbl定位系统能够实现高精度的定位;声学阵列包括声换能器和水听器,它们被预先精确测量并固定在六自由度稳定平台上,这有助于确保测量的准确性和稳定性。usbl定位系统使用声波进行通信,而声波在海洋中的传播距离相对较远,不易受到电磁干扰和其他无线电信号的影响,具有较强的抗干扰能力,能够保证定位的准确性和可靠性。usbl定位系统适用于各种海洋环境,包括浅水、深水、开阔海、复杂海底地貌等,这使得该技术方案能够在各种情况下都能够实现精确的定位。usbl定位系统的成本相对较低,具有较高的性价比,且具有较好的可扩展性以满足更高的要求和不断变化的应用需求。
9、作为优选技术手段:海底信标在usbl坐标系下的相对位置计算表达式为:
10、
11、其中,r是测量斜距,c为水中的声速,d是usbl的基线长度,δtmn=tm-tn是水听器m和n的时间差,其中ti是第i个水听器的单程走时,近似为双程走时;xu,yu、zu为usbl坐标系,α,β分别为水听器与应答器之间的声波信号与usbl坐标系下xu,yu轴的方位角。通过测量斜距、水中的声速、usbl的基线长度和水听器的时间差等参数,能够更准确地计算海底信标的相对位置,这有助于确保定位的准确性和可靠性。
12、作为优选技术手段:gps/usbl组合导航系统通过利用gps和sins的组合导航求解应答器在n系的位置和sins在n系的位置之间的关系:
13、
14、为sins提供的姿态矩阵;lb是usbl坐标系和sins坐标系的常数水平臂在sins系的表示形式;是从usbl系到sins系的安装失准角常数(ima)的矩阵,通过φ=[φx φy φz]t计算如下:
15、
16、通过使用gps和sins的组合导航,能够利用gps的高精度定位和sins的惯性测量信息,提供更准确和可靠的定位结果,利用gps和sins的互补性,提高定位精度和可靠性。
17、作为优选技术手段:定义lb,为待估计的sins/usbl组合系统的系统安装参数;当sins和usbl以理想方式安装且失准小于阈值时,简化为关于安装角误差线性化方程;对于获取信标的绝对位置而言,是关键的安装参数,其用基于lbl的方法来确定。
18、是对旋转矩阵的一种近似表示,用于小角度旋转的情况。当旋转矩阵足够小时,cub可以近似视为单位矩阵加上一个旋转矩阵。
19、lbl是long base line的缩写,即长基线水声定位,相较于usbl定位更加精确,其结果可以当作真值使用。但其更为昂贵。通过测量目标与水声换能器之间的距离来确定目标的相对位置。与短基线水声定位相比,长基线水声定位的基线长度更长,通常为数百米到数公里,而短基线水声定位的基线长度一般为几十米到几百米。基于lbl的方法可以通过时间测量得到目标与每个水声换能器(au)之间的距离,然后通过计算确定目标的相对位置,该方法需要记录每个au发射信号的时间和接收到回波的时间,然后计算信号的传播时间,从而确定目标与au之间的距离。
20、通过使用sins和usbl的组合导航,该技术方案能够利用两者的互补性,降低对单一传感器的依赖,提高系统的鲁棒性,即使在某个传感器出现故障或者性能下降的情况下,组合导航系统仍然能够提供相对准确的定位结果;通过优化算法对系统安装参数进行估计,从而提高定位精度,此外,通过使用lbl方法确定信标的绝对位置,能够进一步增强定位的准确性,减少安装失准对定位精度的影响。与单独使用gps或sins相比,sins/usbl组合导航系统的成本相对较低,能够有效地降低海洋工程的成本,提高经济效益,而且能够保证定位精度。
21、作为优选技术手段:根据以及usbl变换后的全局位置的平均绝对误差(mae)来构造代价函数fwoa(θ):
22、
23、其中:θ是紧凑格式下待估计的系统安装参数,θ7:9=lb分别是应答器位置、失准姿态矩阵和杆臂;符号||·||2是向量的二范数,ns是构造代价函数的样本长度,是sins/gps提供的auv的位置矩阵,是sins/gps提供的auv的姿态矩阵,是usbl输出的相对位置。通过使用代价函数,可以更有效地评估定位方法的性能,从而优化定位精度。
24、作为优选技术手段:鲸鱼优化算法为三种群的鲸鱼优化算法,三种群的鲸鱼优化算法为根据个体的适应度将个体划分为三个大小相等的子种群:探索子种群、开发子种群和适度子种群,对于三个种群使用不同的策略进行位置的更新;探索性子种群和开发性子种群分别进行全局搜索和局部搜索,而适度子种群随机搜索或开发搜索空间。对于开发子种群,具有更好的适应度,可以用于加快收敛速度,快速找到全局最优解。平衡子种群则用于平衡算法的开发能力和探索能力。而对于适应度最差的探索子种群,可能意味着陷入了局部最优解,通过改变更新策略改善其全局搜索能力,可以实现搜索问题空间的更多区域。对于三个种群都各自设计了各自的位置更新策略。将鲸鱼种群分为三个自适应大小的亚种群,具有良好适应度的个体组成开发子群体,用于加快收敛速度,快速找到全局最优解。具有较差适应性的个体构成探索性子群体。由于适应度较差,搜索子种群中的个体远离当前最优解,从而使算法具有鲁棒的全局搜索能力,可以搜索问题空间的更多区域。剩余个体组成一个中间态亚种群,用于平衡算法的开发与探索能力。这种方法结合了全局搜索和局部搜索的优势,可以更有效地寻找最优解,从而提高定位精度。
25、作为优选技术手段:通过每个鲸鱼的位置与当前次迭代的最佳位置x*(t)的距离d=|x*(t)-x(t)|大小进行鲸鱼种群划分;对于距离最优位置距离最短的前40%的种群划分为开发子种群,40%~80%划分为平衡子种群,距离最远的20%划分为探索子种群。种群的划分,在每次迭代的开始都会进行重新划分。这种方法可以更有效地利用种群的多样性,从而找到更优的解。
26、作为优选技术手段:对于开发子种群采用如下的位置更新策略:
27、a=2a*rand1-a
28、d=|c.xrand(t)-x(t)|
29、x(t+1)=xrand(t)-a.d
30、其中,a是收敛因子,选a=0.5使得鲸鱼种群平衡局部搜索和全局搜索;d是当前搜索个体和当前最优解的距离;a是系数矩阵;
31、对于平衡子种群,其适应度好坏居中;因此,对于适度子群体中的个体选择探索方式以找寻新的解决方案,或采用局部搜索方式进行局部的搜索以增加收敛速率,从而实现探索和利用之间的随机平衡;其更新策略如下:
32、a=2a*rand1-a
33、d=|x(t)-x*(t)|
34、
35、其中,p1,p2为生成的0到1之间的随机数;a是收敛因子;d是当前搜索个体和当前最优解的距离;a是系数矩阵;
36、对于探索子种群,由于个体适应度差而远离局部最优解,故选择其群体中的个体致力于全局寻优,其更新策略如下:
37、a=2a*rand1-a
38、d=|c.xrand(t)-x(t)|
39、x(t+1)=xrand(t)-a.d
40、其中,a是收敛因子;d是当前搜索个体和随机搜索个体的距离,可以驱使当前搜索个体偏向于全局搜索;a是系数矩阵;
41、通过三种群的鲸鱼优化算法进行估计优化,求解出最优的sins/usbl组合系统的系统安装参数lb,完成对系统安装误差的校正。这种策略可以更有效地搜索全局最优解,同时保持种群的多样性。
42、作为优选技术手段:在完成误差校准后,海底电缆信标位置由以下公式求得:
43、
44、通过误差校准,可以进一步优化定位结果,提高定位精度。
45、有益效果:本技术方案通过改进的鲸鱼优化算法辅助方法来识别sins/usbl的系统安装误差。通过最小化成本函数和消除对基于分离的校准方法的额外要求,实现了系统安装误差的统一校准。并利用usbl和sins/gps的互补性,提高定位精度和稳定性,为水下组合定位系统安装误差校正与海缆定位提供了重要参考。
- 还没有人留言评论。精彩留言会获得点赞!