毫米波雷达阵列的角度计算、雷达终端及存储介质的制作方法
本技术涉及雷达探测,具体涉及一种毫米波雷达阵列的角度计算、雷达终端及存储介质。
背景技术:
1、随着我国汽车业的迅速发展,市场对毫米波雷达的需求量与日俱增,同时也不断对毫米波雷达提出更高的性能要求,包括但不限于增加对目标高度角的探测以及更准确的角度估计结果,这就要求4d成像雷达必须在俯仰维度具备测高的能力,需要精确地识别窨井盖、减速带、指示牌与立交桥等具有高度信息的目标,并能准确输出这些目标的角度结果,从而能够完成驾驶安全辅助功能,进一步地实现l2+、l2++乃至l3级别的自动驾驶。
2、在构思及形成本技术的研究过程中,申请人至少发现以下问题,4d成像雷达通常会采用多芯片级联的方案,天线通道数量多,阵列规模很大,因此雷达具有充足的天线资源采用两个独立的子阵列分别进行方位角和高度角的估计,但受限于探测某一维度的天线子阵列阵元必须在此维度上具有丰富而稀疏的位置排布,从而导致两子阵列均无法同时使用全部的天线资源。且由于采用了两个子阵列,市场上大部分成像雷达将方位维度与高度维度的阵列布局独立来看待,在布局时忽略了两者之间的相关性。由于两个子阵列在布局上通常是正交的,因此大部分天线单元均不能进行复用,从而没有余力同时关注目标在两个维度上的角度,造成角度估计的准确性降低,容易解出错误的镜像假目标。在某些具有多目标存在的特殊场景下,极易出现假目标的干扰,即无法将同一目标的方位角与高度角相对应,从而在镜像位置出现被错误估计的假目标。
技术实现思路
1、为了缓解以上问题,本技术提供一种毫米波雷达阵列的角度计算方法,包括:
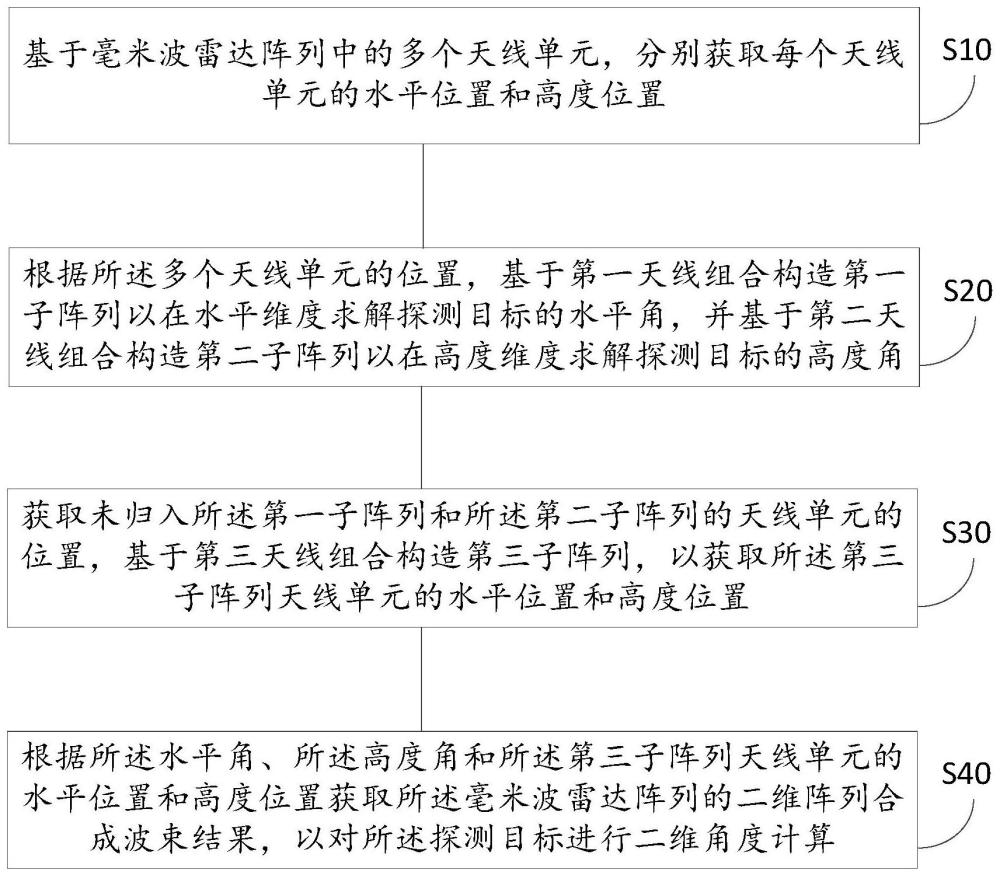
2、基于毫米波雷达阵列中的多个天线单元,分别获取每个天线单元的水平位置和高度位置;
3、根据所述多个天线单元的位置,基于第一天线组合构造第一子阵列以在水平维度求解探测目标的水平角,并基于第二天线组合构造第二子阵列以在高度维度求解探测目标的高度角;
4、获取未归入所述第一子阵列和所述第二子阵列的天线单元的位置,基于第三天线组合构造第三子阵列,以获取所述第三子阵列天线单元的水平位置和高度位置;
5、根据所述水平角、所述高度角和所述第三子阵列天线单元的水平位置和高度位置获取所述毫米波雷达阵列的二维阵列合成波束结果,以对所述探测目标进行二维角度计算。
6、可选地,所述基于毫米波雷达阵列中的多个天线单元,分别获取每个天线单元的水平位置和高度位置的步骤包括:
7、用二维矩阵方式记录每个天线单元的位置,以ai*d表示第i个天线单元与第一个天线单元的方位差,以ej*d表示第j个天线单元与第一个天线单元的高度差;
8、其中,i表示水平编号,ai表示第i个天线单元的水平位置,j表示高度编号,ej表示第j个天线单元的高度位置,d=0.5λ,λ为探测频点电磁波在自由空间的波长。
9、可选地,所述基于第一天线组合构造第一子阵列以在水平维度求解探测目标的水平角的步骤中,按照以下表达式计算所述第一子阵列的水平维度角度分辨率:
10、x=sin-1[0.5/(am-an+ax-ay)]
11、其中,x为第一子阵列的水平维度角度分辨率,am为发射阵列中的尾部发射天线的水平位置,an为发射阵列中头部发射天线的水平位置,am-an为水平维度的发射阵列长度,ax为接收阵列中的尾部接收天线的水平位置,ay为接收阵列中头部接收天线的水平位置,ax-ay为水平维度的接收阵列长度,两者之和为第一子阵列的虚拟孔径。
12、可选地,所述基于第二天线组合构造第二子阵列以在高度维度求解探测目标的高度角的步骤中,按照以下表达式计算所述第二子阵列的高度维度角度分辨率:
13、y=sin-1[0.5/(em-en+ex-ey)]
14、其中,y为第二子阵列的高度维度角度分辨率,em为发射阵列中的尾部发射天线的高度位置,en为发射阵列中头部发射天线的高度位置,em-en为高度维度的发射阵列长度,ex为接收阵列中的尾部接收天线的高度位置,ey为接收阵列中头部接收天线的高度位置,ex-ey为高度维度的接收阵列长度,两者之和为第二子阵列的虚拟孔径。
15、可选地,所述获取未归入所述第一子阵列和所述第二子阵列的天线单元的位置,基于第三天线组合构造第三子阵列的步骤中包括:
16、选择不同高度位置的发射天线和同一高度位置的接收天线以构造所述第三子阵列,其中在多个高度位置相同的发射天线单元中,选择其中一个天线单元归入所述第三天线组合,以避免对所述第三子阵列的计算结果造成冗余。
17、可选地,所述在多个高度位置相同的天线单元中,选择其中一个天线单元归入所述第三天线组合,以避免对所述第三子阵列的计算结果造成冗余的步骤包括:
18、在多个高度位置相同的天线单元中,选择能使数字域内二维阵列合成波束水平维度切面或俯仰维度切面的主瓣宽度最窄的天线单元,其中任一维度剖面的主瓣越窄,则对应假目标的概率越低。
19、可选地,所述根据所述水平角、所述高度角和所述第三子阵列天线单元的水平位置和高度位置获取所述毫米波雷达阵列的二维阵列合成波束结果的步骤中,根据以下表达式计算所述二维阵列doa估计结果:
20、
21、其中,p为二维阵列合成波束结果,dx为第三子阵列中天线单元的水平位置,θ为通过第一子阵列计算得到的目标水平角,dy为第三子阵列中天线单元的高度位置,为通过第二子阵列计算得到的目标高度角。
22、可选地,所述根据所述水平角、所述高度角和所述第三子阵列天线单元的水平位置和高度位置获取所述毫米波雷达阵列的二维阵列合成波束结果,以对所述探测目标进行二维角度计算的步骤之后包括:
23、根据二维阵列合成波束结果的峰值幅度大小来判断目标的真实性,若此时存在两个目标,则真实目标将对应于最高及次高幅度。
24、本技术还提供一种雷达终端,包括:存储器、处理器,其中,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时实现如上述的毫米波雷达阵列的角度计算方法的步骤。
25、本技术还提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述的毫米波雷达阵列的角度计算方法的步骤。
26、本技术提供的毫米波雷达阵列的角度计算、雷达终端及存储介质,在第一天线阵列和第二天线阵列之外,获取未归入所述第一子阵列和所述第二子阵列的天线单元的位置,基于第三天线组合构造第三子阵列,以获取所述第三子阵列天线单元的水平位置和高度位置;根据所述水平角、所述高度角和所述第三子阵列天线单元的水平位置和高度位置获取所述毫米波雷达阵列的二维阵列合成波束结果,以对所述探测目标进行二维角度计算。在计算过程中,按照先后次序分别解出两个维度的角度后,再综合考虑了两个维度的天线阵列布局方式,通过构造出一个全新的子阵列直接对可能存在的目标进行二维doa估计,由此可同时获取目标在两个维度上的角度,不仅充分使用了全部的天线资源,还较大程度地增加了真实目标的置信度,降低假目标出现的概率,在保证角分辨力的同时,进一步提高了角度估计的准确性。
- 还没有人留言评论。精彩留言会获得点赞!