一种基于航路网络的智能航线规划方法、装置及电子设备
本发明涉及水路交通领域,具体涉及一种基于航路网络的智能航线规划方法、装置及电子设备。
背景技术:
1、在水路交通中,自主化的航线规划技术实现最优航线的自动选择是船舶智能航线技术体系的重要内容。传统航线规划算法通常将航行区域进行空间划分形成栅格网络,将船舶航线最优问题转换为在网格中的路径寻优问题,并利用图论中包括dijstra与a*的经典路径规划算法进行求解。启发式新型算法则为航线规划求解最优的问题提供了更多的解决方法。主要有蚁群算法、遗传算法、进化算法、人工神经网络算法等,这些智能算法不仅能实现对船舶航线单目标优化,还能进行混合构建多目标优化模型,为复杂水域下航行的船舶提供航线选择。但随着约束条件的增加,计算复杂度也会随着增高,因此构建的航线仍然不够精细。随着大数据和深度学习发展,船舶航线规划开始利用历史ais航行数据来提取潜在航线的分布规律,通过轨迹聚类方法为船舶规划一条可行的航线。但这种方法通常忽略了当前航次中的地理环境信息以及其他约束条件。同时船舶轨迹数据本身也存在着高度噪声、广泛的覆盖范围、稀疏的采样和显著的密度分布差异等问题,会影响生成航线的安全性和精确性。
技术实现思路
1、有鉴于此,有必要提供一种基于航路网络的智能航线规划方法及装置,用于解决现有技术基于航路网络的智能航线规划方法精度较低,安全性不足的技术问题。
2、为了解决上述技术问题,一方面本发明提供了一种基于航路网络的智能航线规划方法,包括:
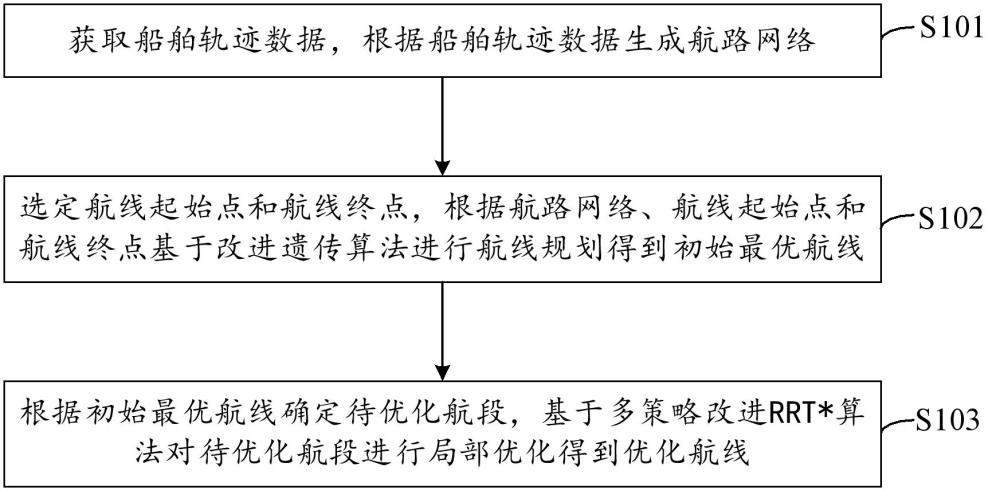
3、获取船舶轨迹数据,根据船舶轨迹数据生成航路网络;
4、选定航线起始点和航线终点,根据航路网络、航线起始点和航线终点基于改进遗传算法进行航线规划得到初始最优航线;
5、根据初始最优航线确定待优化航段,基于多策略改进rrt*算法对待优化航段进行局部优化得到优化航线。
6、进一步的,根据船舶轨迹数据生成航路网络,包括:
7、依次进行轨迹清洗、轨迹平滑和缺失值插值处理,对船舶轨迹数据进行预处理得到预处理轨迹数据;
8、基于局部阈值过滤法对预处理轨迹数据中关键特征点进行识别得到航路点集合,并对航路点集合进行聚类得到航路点区域;
9、基于航路点区域对船舶轨迹进行分割得到航路点区域子轨迹集合;
10、构建轨迹运动相识性度量模型,根据轨迹运动相识性度量模型将航路点区域子轨迹集合聚类得到航路段;
11、确定各航路段的几何连接关系得到航路轨迹,并对航路轨迹进行异常过滤和航路边界识别得到航路网络拓扑结构。
12、进一步的,选定航线起始点和航线终点,根据航路网络、航线起始点和航线终点基于改进遗传算法进行航线规划得到初始最优航线,包括:
13、定义改进遗传算法优化目标;
14、以航线起始点作为种群个体的首个航路点,在各方向上选择下一个航行航路点,直至选择到航线终点,形成一条航线作为一个种群个体,重复选择过程直至生成满足初始种群规模的种群个体;
15、基于适应度值线性尺度变换方法构建适应度函数,根据适应度函数确定各种群个体的适应度;
16、基于轮盘赌选择法作为改进遗传算法的选择操作以保留适应度值大的种群个体,以单点交叉和均匀变异作为改进遗传算法的交叉操作和变异操作,对初始种群进行迭代优化得到初始最优航线。
17、进一步的,定义改进遗传算法优化目标,包括:
18、定义航线规划的运动变量,运动变量包括航路点坐标和转向变量;
19、定义航线规划的网络特征指标,网络特征指标包括节点度、点介数和介数中心性;
20、根据运动变量和网络特征指标定义航线规划的优化目标,优化目标包括航线距离、转向次数和航路节点通行能力;
21、综合各优化目标得到改进遗传算法优化目标。
22、进一步的,根据初始最优航线确定待优化航段,包括:
23、获取航线区域海图数据,根据海图数据判断航线区域危险性,并二值化划分为禁航区和安全区,根据禁航区和安全区构建二值地图;
24、将初始最优航线映射到二值地图中得到映射航线;
25、基于映射航线生成椭圆空间;
26、根据椭圆空间和禁航区确定待优化航段。
27、进一步的,基于多策略改进rrt*算法对待优化航段进行局部优化得到优化航线,包括:
28、在待优化航线对应椭圆空间内,将待优化航段的起始航路点作为生成树根节点;
29、基于采样点相似策略确定采样区域,基于方向引导策略引导在采样区域生成待优化航段的起始航路点到目标航路点的优化航线。
30、进一步的,基于采样点相似策略确定采样区域,包括:
31、根据航路网络得到航行特征信息,根据航线特征信息确定航速比例;
32、以航线生成的父节点作为采样区域中心点,根据航速比例确定采样区域半径,根据采样区域中心点和采样区域半径确定采样区域。
33、进一步的,基于方向引导策略引导在采样区域生成待优化航段的起始航路点到目标航路点的优化航线,包括:
34、定义随机树生长概率;
35、根据随机树生长概率定义新节点选择函数;
36、根据新节点选择函数定义生长引导函数;
37、根据生长引导函数选择随机树新节点;
38、迭代随机树新节点生长过程,得到待优化航段的起始航路点到目标航路点的优化航线。
39、另一方面,本发明还提供了一种基于航路网络的智能航线规划装置,包括:
40、航路网络生成单元,用于获取船舶轨迹数据,根据船舶轨迹数据生成航路网络;
41、初始航线规划单元,用于选定航线起始点和航线终点,根据航路网络、航线起始点和航线终点基于改进遗传算法进行航线规划得到初始最优航线;
42、航段优化单元,用于根据初始最优航线确定待优化航段,基于多策略改进rrt*算法对待优化航段进行局部优化得到优化航线。
43、另一方面,本发明还提供了一种电子设备,包括存储器和处理器,其中,
44、存储器,用于存储计算机程序;
45、处理器,与存储器耦合,用于执行计算机程序,以实现上述任意一项的基于航路网络的智能航线规划方法中的步骤。
46、与现有技术相比,采用上述实施例的有益效果是:本发明通过改进遗传算法进行整体航线规划,通过多策略改进rrt*算法进行局部航段优化,得到安全高精度的船舶航线。
技术特征:
1.一种基于航路网络的智能航线规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于航路网络的智能航线规划方法,其特征在于,所述根据所述船舶轨迹数据生成航路网络,包括:
3.根据权利要求1所述的基于航路网络的智能航线规划方法,其特征在于,所述选定航线起始点和航线终点,根据所述航路网络、所述航线起始点和所述航线终点基于改进遗传算法进行航线规划得到初始最优航线,包括:
4.根据权利要求3所述的基于航路网络的智能航线规划方法,其特征在于,所述定义改进遗传算法优化目标,包括:
5.根据权利要求1所述的基于航路网络的智能航线规划方法,其特征在于,所述根据所述初始最优航线确定待优化航段,包括:
6.根据权利要求5所述的基于航路网络的智能航线规划方法,其特征在于,所述基于多策略改进rrt*算法对所述待优化航段进行局部优化得到优化航线,包括:
7.根据权利要求6所述的基于航路网络的智能航线规划方法,其特征在于,所述基于采样点相似策略确定采样区域,包括:
8.根据权利要求6所述的基于航路网络的智能航线规划方法,其特征在于,所述基于方向引导策略引导在所述采样区域生成待优化航段的起始航路点到目标航路点的优化航线,包括:
9.一种基于航路网络的智能航线规划装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括存储器和处理器,其中,
技术总结
本发明提供了一种基于航路网络的智能航线规划方法、装置及电子设备,包括:获取船舶轨迹数据,根据船舶轨迹数据生成航路网络;选定航线起始点和航线终点,根据航路网络、航线起始点和航线终点基于改进遗传算法进行航线规划得到初始最优航线;根据初始最优航线确定待优化航段,基于多策略改进RRT*算法对待优化航段进行局部优化得到优化航线。综上,本发明通过改进遗传算法进行整体航线规划,通过多策略改进RRT*算法进行局部航段优化,得到安全高精度的船舶航线。
技术研发人员:黄亮,汪嘉慈,文元桥,黄亚敏,朱曼
受保护的技术使用者:武汉理工大学三亚科教创新园
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!