一种载波距支持下的GNSS非差固定解精密钟差确定方法与流程
本发明属于导航定位,特别涉及一种载波距支持下的gnss非差固定解精密钟差确定方法。
背景技术:
1、目前全球导航卫星系统(global navigation satellite systems,gnss)正朝着多频多系统集成的方向快速发展,高精度高可靠性的gnss卫星轨道和钟差产品是扩展gnss精密应用的重要前提。
2、由于载波相位观测值中未校准相位延迟(uncalibratedphase delay,upd)和模糊度线性相关,卫星钟差估计模型中的模糊度参数会吸收卫星端和接收机端的upd参数,导致实际估计非差模糊度参数失去了其整周特性,因此目前大部分国际卫星全球定位服务(international gps service,igs)提供卫星钟差产品均是浮点解,精度相对较低并且不能满足gnss精密应用的需要。同时,由于卫星原子钟易受到空间环境噪声以及卫星钟本身频移的影响,卫星钟差的变化非常复杂难以对其精确建模进行预报,因此卫星钟差的长期预报精度不高,需要根据地面实测数据进行实时估计,计算时必须每个历元都解算卫星钟差参数,特别是近几年multi-gnss卫星的数量正逐年增加,使得待估参数数量大大增加,卫星钟差的计算效率不高,这是实时估计gnss精密卫星钟差一直未能很好解决的问题。
技术实现思路
1、本发明的目的是提供一种载波距支持下的gnss非差固定解精密钟差确定方法,提高多系统导航卫星精密钟差确定的精度和可靠性,提升gnss大网解算和gnss估钟等的计算效率。
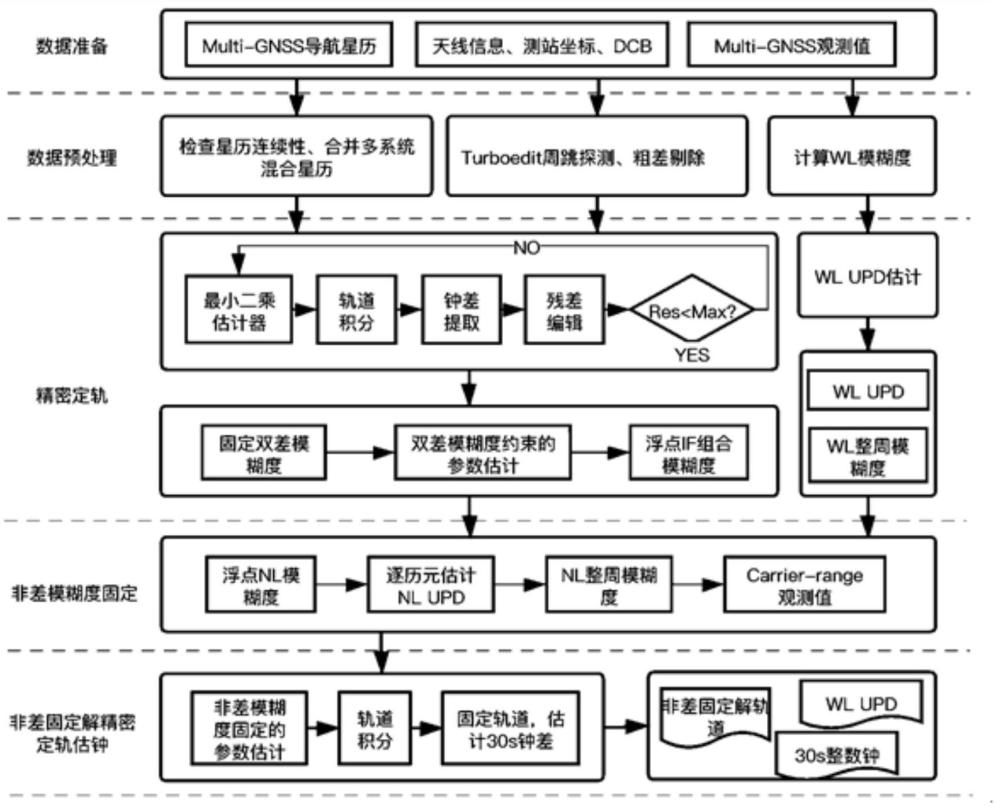
2、本发明采取的技术方案是一种载波距支持下的gnss非差固定解精密钟差确定方法,包括以下步骤:
3、s1,数据准备与预处理;
4、s2,multi-gnss精密定轨;
5、s3,固定双差模糊度;
6、s4,非差模糊度固定;
7、s5,非差模糊度固定解的精密定轨估钟。
8、进一步地,所述s1的具体步骤包括:
9、s11,从igs的数据中心下载multi-gnss的导航星历和观测值,准备igs天线文件、igs测站坐标周解文件、差分码偏差文件;
10、s12,检查各个gnss系统导航星历的连续性,并合并为多系统混合星历;
11、s13,利用得到的混合星历,通过turboedit方法探测rinexo文件中的周跳信息并剔除粗差;
12、s14,通过mw组合计算宽巷模糊度。
13、进一步地,所述s13中,turboedit方法主要包含两部分,即分别组成melbourne-wübbena组合和gf组合进行周跳探测和粗差剔除。
14、进一步地,所述s2的具体步骤包括:
15、s21,从导航星历中获得每颗卫星在参考时刻的位置和速度,并从全部定轨弧长的导航星历中拟合出力模型参数的初始值;
16、s22,输入卫星初轨信息、gnss观测值、天线信息、测站坐标、差分码偏差进行最小二乘解算;
17、s23,在浮点解最小二乘迭代中,固定erp参数;
18、s24,在参数估计更新卫星的初轨信息之后,通过轨道积分更新卫星的位置和速度,并提取卫星钟差和接收机钟差作为下一次参数估计的初始值;
19、s25,通过分析参数估计的相位和伪距残差信息,剔除掉短弧段和粗差,根据残差结果判断是否进行下一次迭代。
20、进一步地,所述s22中,最小二乘解算的gps+glonass+北斗+galileo四系统联合定轨的观测方程为:
21、
22、
23、
24、
25、
26、
27、
28、
29、式中,g、r、c、e分别代表gps、glonass、北斗和galileo系统;上标k代表glonass的频率号;l和p分别表示相位和伪距观测值的观测值减去模型计算值;表示接收机到卫星的单位向量;φ(t,t0)为卫星从参考时刻t0到当前时刻t的状态转移矩阵;表示卫星的t0时刻初始状态的改正数;rr表示测站位置的改正数;为glonass相对于gps的接收机钟偏差;isbgc为北斗相对于gps的接收机钟偏差;isbge为galileo相对于gps的接收机钟偏差;和分别为吸收了伪距硬件延迟的接收机和卫星端钟差参数;表示吸收了相位偏差与钟差伪距基准的if组合相位模糊度参数;表示对流层投影函数;zr表示对流层在测站天顶方向的湿延迟;λif,s为无电离层组合波长;为相位无电离层组合的噪声;为伪距无电离层组合的噪声。
30、进一步地,所述s3中,固定双差模糊度即在浮点解收敛之后,计算双差模糊度固定解,同时,估计宽巷udp。
31、进一步地,计算双差模糊度固定解的具体步骤包括:
32、s31,在不同测站和不同卫星间组成双差模糊度,选择其中优质的独立基线,通过取整法固定其双差模糊度;
33、s32,将整周双差模糊度作为虚拟观测方程并给予很高的权叠加到最小二乘估计的法方程中,实现双差模糊度固定解,并同时得到高精度的非差无电离层组合模糊度。
34、进一步地,解算卫星端和接收机端的宽巷upd,然后通过取整的方式得到宽巷整周模糊度:
35、
36、式中,和表示接收机端和卫星端宽巷upd的估计值;表示宽巷模糊度。
37、进一步地,所述s4的具体步骤包括:
38、s41,利用从s3中得到的高精度非差无电离层组合模糊度和宽巷整周模糊度,计算出每个测站每颗卫星的窄巷模糊度;
39、s42,逐历元解算卫星端和接收机端窄巷upd,同时在浮点窄巷模糊度中扣除upd,再利用取整法固定为整数,置信度大于99.9%时接受固定结果;
40、s43,利用前面步骤得到的观测值弧段信息,如果一个弧段有60%的历元都成功固定,且固定到同一个值,则将该弧段的模糊度固定为这个值,由此得到所有成功固定弧段的载波距观测值,没有固定的弧段保持原状。
41、进一步地,所述s41中,计算窄巷模糊度的公式为:
42、
43、式中,分别表示双频相位观测值的模糊度;f1、f2分别为双频观测值的频率;表示宽巷模糊度;λif表示无电离层组合波长;表示吸收了相位偏差与钟差伪距基准的if组合相位模糊度参数。
44、进一步地,所述s42中,逐历元解算卫星端和接收机端窄巷upd的观测方程为:
45、
46、式中,表示模糊度的小数部分;rig、rir、ric和rie表示四系统接收机端upd的系数矩阵;sj为卫星端upd的系数矩阵;μg、μr、dc和de分别为四系统接收机端upd,μs对应不同卫星的卫星端upd。
47、进一步地,所述s5的具体步骤包括:
48、s51,利用s4中得到的载波距观测值进行最小二乘参数估计;
49、s52,进行非差固定解定轨的解算;
50、s53,通过轨道积分得到非差固定解的卫星轨道产品;
51、s54,将轨道固定,参数估计的采样率从300s改为30s,估计30s采样率的整数钟;
52、s55,最后服务端输出的产品是非差固定解的精密轨道、30s采样率的整数钟以及配合整数钟使用的宽巷upd。
53、进一步地,获取的基于载波距的multi-gnss精密定轨观测方程为:
54、
55、
56、
57、
58、
59、
60、
61、
62、式中,g、r、c、e分别代表gps、glonass、北斗和galileo系统;上标k代表glonass的频率号;l和p分别表示相位和伪距观测值的观测值减去模型计算值;表示接收机到卫星的单位向量;φ(t,t0)为卫星从参考时刻t0到当前时刻t的状态转移矩阵;表示卫星的t0时刻初始状态的改正数;rr表示测站位置的改正数;为glonass相对于gps的接收机钟偏差;isbgc为北斗相对于gps的接收机钟偏差;isbge为galileo相对于gps的接收机钟偏差;和分别为吸收了相位偏差的接收机和卫星端钟差参数;表示对流层投影函数;zr表示对流层在测站天顶方向的湿延迟;为相位无电离层组合的噪声;为伪距无电离层组合的噪声。
63、本发明的有益效果在于:
64、1、实现了载波距支持下的gnss非差固定解精密钟差确定算法,基于非差模糊度固定技术获取到载波距观测值,实现四系统非差固定解联合定轨和整数钟估计,由此提高多系统导航卫星精密钟差确定的精度和可靠性。
65、2、相比起其他采用双差模糊度固定解的gnss精密轨道和钟差确定,本发明能够实现非差宽巷和窄巷模糊度整数值的解算,并先后在无电离层组合相位观测值上减去整周的宽巷和窄巷模糊度,从而得到高精度的非差固定解gnss轨道和钟差结果。
66、3、使用载波距观测值进行解算时,由于不需要估计模糊度参数,可以极大的提升gnss大网解算和gnss估钟等的计算效率,不过这种方法生成的载波距观测值所用模糊度仍然是从双差整数模糊度中恢复出来的,其依赖于所选的基线质量的优劣。
- 还没有人留言评论。精彩留言会获得点赞!