IMU持续校准方法、装置、设备及存储介质与流程
本发明涉及传感器校准,尤其涉及一种imu持续校准方法、装置、设备及存储介质。
背景技术:
1、基于mems的传感器具有体积小、重量轻、可靠性高、成本低以及易于大规模生产等优点;近年来随着mems技术的普及以及器件价格的下降,mems器件拥有广阔的应用前景,mems陀螺仪和加速度计作为典型的mems惯性传感器,通常在一起组合使用形成imu(惯性测量单元),已经广泛应用于无人机、机器人的智能控制及消费电子产品领域。
2、但imu的测量误差一直是个棘手的问题,imu的测量误差不但受到imu内部器件的电磁和机械特性影响,还可能随着使用环境的改变而发生变化,如果需要让其适配到各种各样的环境中,那就需要在出厂前使用专用设备进行大量的误差参数标定工作;在标定的过程中不但需要控制各式各样的环境参数,还要精确控制imu的运动状态,这是对imu厂商人力、物力和财力的巨大消耗,且用于实现校准的机械平台通常非常昂贵,这也导致了imu的生产成本急剧上升;然而,若厂商不对imu的误差参数进行精确标定,则可能使imu的精度难以满足实际场景的应用需求,降低购买者的使用体验。
3、可见,现有技术还有待改进和提高。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种imu持续校准方法、装置、设备及存储介质,可大大降低imu出厂前误差参数的校准工作量,降低imu的校准成本,且可确保imu的误差参数更贴合实际使用场景。
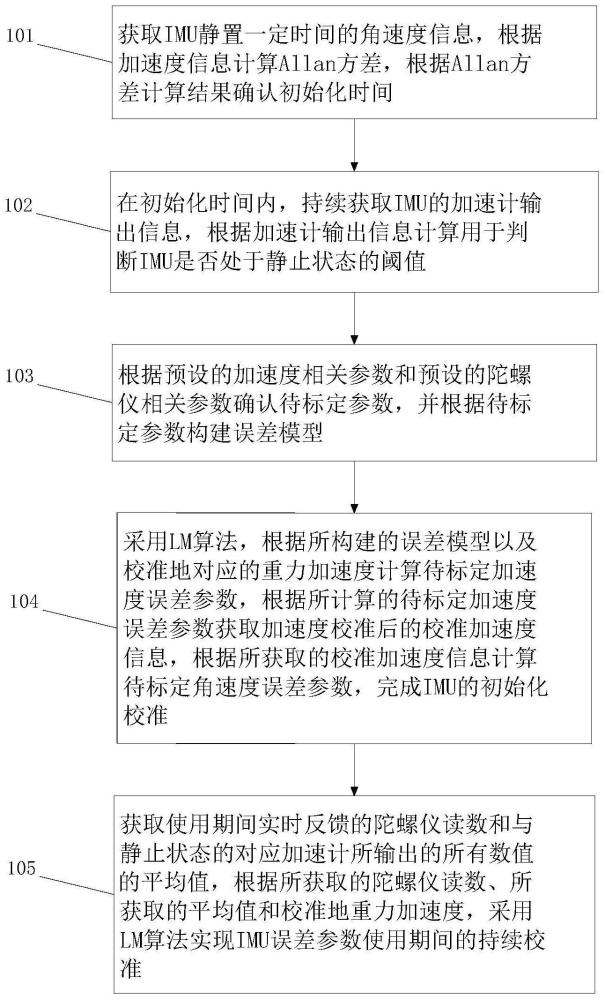
2、本发明第一方面提供了一种imu持续校准方法,包括:获取imu静置一定时间的角速度信息,根据角速度信息计算allan方差,根据allan方差计算结果确认初始化时间tinit;在初始化时间tinit内,持续获取imu的加速计输出信息,根据加速计输出信息计算用于判断imu是否处于静止状态的阈值;根据预设的加速度相关参数和预设的陀螺仪相关参数确认待标定参数,并根据待标定参数构建误差模型;采用lm算法,根据所构建的误差模型以及校准地对应的重力加速度计算待标定加速度误差参数,根据所计算的待标定加速度误差参数获取加速度校准后的校准加速度信息,根据所获取的校准加速度信息计算待标定角速度误差参数,完成imu的初始化校准;获取使用期间实时反馈的陀螺仪读数和与静止状态的对应加速计所输出的所有数值的平均值,根据所获取的陀螺仪读数、所获取的平均值和校准地重力加速度,采用lm算法实现imu误差参数使用期间的持续校准。
3、可选的,在本发明第一方面的第一种实施方式中,所述获取imu静置一定时间的角速度信息,根据角速度信息计算allan方差,根据allan方差计算结果确认初始化时间tinit,具体包括:获取imu处于静置姿态的静置信息,所述静置信息的静置时间≥预设的检测时间;将角速度信息以预设的时间划分成k个区间,根据角速度信息计算allan方差调整时间的数值大小,重复计算allan方差当allan方差σa2的数值满足预设的收敛条件时,获取对应的时间作为初始化时间tinit;在初始化时间tinit内,获取陀螺仪所输出的所有读数并取平均,得到陀螺仪的基础漂移ωb。
4、在本发明第一方面的第二种实施方式中,所述在初始化时间tinit内,持续获取imu的加速计输出信息,根据加速计输出信息计算用于判断imu是否处于静止状态的阈值,具体包括:在初始化时间tinit内,持续获取imu的加速计输出信息,并对应计算初始化时间tinit内的方差根据所计算的方差和预设的系数α计算用于判断imu是否处于静止状态的阈值在一定时间tw内,持续获取imu的加速计输出信息,并对应计算时间tw内的方差根据和的比较结果确认imu处于静止状态或运动状态。
5、在本发明第一方面的第三种实施方式中,所述根据预设的加速度相关参数和预设的陀螺仪相关参数确认待标定参数,具体包括:所述加速度相关参数包括加速度测量坐标轴失准误差参数ta、加速度放大误差ka和加速度漂移ba,其表达式分别为:
6、
7、
8、
9、所述陀螺仪相关参数包括陀螺仪测量坐标轴失准误差参数tg、陀螺仪放大误差kg和陀螺仪漂移bg,其表达式分别为:
10、
11、
12、
13、所述待标定参数包括待标定加速度误差参数θacc和待标定陀螺仪误差参数θgyro,其表达式分别为:
14、
15、
16、在本发明第一方面的第四种实施方式中,所述并根据待标定参数构建误差模型,具体包括:所述误差模型的表达式为:
17、a0=taka(as+ba+va)=h(as,θacc)
18、ω0=tgkg(ωs+bg+vg);
19、其中,va为加速度测量噪声,vg为陀螺仪测量噪声,as是静止状态加速计所输出的数值,ws是实时陀螺仪读数。
20、在本发明第一方面的第五种实施方式中,所述采用lm算法,根据所构建的误差模型以及校准地对应的重力加速度计算待标定加速度误差参数,根据所计算的待标定加速度误差参数获取加速度校准后的校准加速度信息,根据所获取的校准加速度信息计算待标定角速度误差参数,完成imu的初始化校准,具体包括:根据所构建的误差模型,定义第一代价函数为:
21、
22、使用lm算法使第一代价函数最小化,得到θacc的最优解;
23、获取加速度校准后的校准加速度信息,对所获取的角速度信息以及校准加速度信息进行积分,而后计算第k次静止状态时的加速度μa,k,所获取的角速度信息包括第k-1次和第k次静止状态之间的n次陀螺仪读数所获取的校准加速度信息包括第k-1次静止状态时加速计所输出的所有数值的平均值μg,k-1;所述μa,k的表达式如下:
24、
25、其中,φ为积分算子;
26、定义第二代价函数为:
27、
28、其中,μg,k为校准加速度信息包括的第k次静止状态时加速计所输出的所有数值的平均值;
29、使用lm算法使第二代价函数最小化,得到θgyro的最优解;
30、根据所计算的待标定参数θacc和θgyro完成imu的初始化校准。
31、在本发明第一方面的第六种实施方式中,所述获取使用期间实时反馈的陀螺仪读数和与静止状态对应的加速计所输出的所有数值的平均值,根据所获取的陀螺仪读数、所获取的平均值和校准地重力加速度,采用lm算法实现imu误差参数使用期间的持续校准,具体包括:在imu使用期间,获取第k次静止状态和第k-1次静止状态之间的n次陀螺仪的校准读数
32、根据n次陀螺仪的校准读数的积分结果以及校准加速度信息所包括的第k-1次静止状态加速计所输出的所有数值的平均值μg,k-1,计算第k次静止状态的加速度μ1a,k,具体的:
33、
34、定义第三代价函数为:
35、
36、其中,μg,k为校准加速度信息包括的第k次静止状态时加速计所输出的所有数值的平均值;
37、使用lm算法使第三代价函数最小化,得到θ1acc的最优解,其中,ε为预设权重,θ1acc为使用期间加速度的误差参数;
38、采用所计算的θ1acc对校准加速度信息所包括的μg,k和μg,k-1进一步校正,得到校正后的、与第k次静止状态对应的校正平均值μ1g,k以及与第k-1次静止状态对应的校正平均值μ1g,k-1;
39、根据角速度信息包括的n次陀螺仪读数的积分结果以及与第k-1次静止状态对应的校正平均值μ1g,k-1计算估计加速度μ2a,k,具体的:
40、
41、定义第四代价函数为:
42、
43、使用lm算法使第四代价函数最小化,得到θ1gyro的最优解,其中,ε为预设权重,θ1gyro为使用期间陀螺仪的误差参数,使用θ1acc和θ1gyro实现imu误差参数使用期间的持续校准。
44、本发明第二方面提供了一种imu持续校准装置,包括:获取模块,用于获取imu静置一定时间的角速度信息,根据角速度信息计算allan方差,根据allan方差计算结果确认初始化时间tinit;判断模块,用于在初始化时间tinit内,持续获取imu的加速计输出信息,根据加速计输出信息计算用于判断imu是否处于静止状态的阈值;构建模块,用于根据预设的加速度相关参数和预设的陀螺仪相关参数确认待标定参数,并根据待标定参数构建误差模型;初始化校准模块,用于采用lm算法,根据所构建的误差模型以及校准地对应的重力加速度计算待标定加速度误差参数,根据所计算的待标定加速度误差参数获取加速度校准后的校准加速度信息,根据所获取的校准加速度信息计算待标定角速度误差参数,完成imu的初始化校准;持续校准模块,用于获取使用期间实时反馈的陀螺仪读数和与静止状态的对应加速计所输出的所有数值的平均值,根据所获取的陀螺仪读数、所获取的平均值和校准地重力加速度,采用lm算法实现imu误差参数在使用期间的持续校准。
45、本发明第三方面提供了一种imu持续校准设备,所述imu持续校准设备包括:存储器和至少一个处理器,所述存储器中存储有指令;至少一个所述处理器调用所述存储器中的所述指令,以使得所述imu持续校准设备执行上述任一项所述的imu持续校准方法的各个步骤。
46、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,所述指令被处理器执行时实现上述任一项所述imu持续校准方法的各个步骤。
47、本发明的技术方案中,通过获取imu静置一定时间的角速度信息,并计算allan方差,根据allan方差计算结果确认初始化时间tinit;在初始化时间tinit内,持续获取imu的加速计输出信息,并计算用于判断imu是否处于静止状态的阈值;根据预设的相关参数确认待标定参数,并构建误差模型;计算待标定参数,根据所计算的待标定参数完成imu的初始化校准;获取使用期间实时反馈的陀螺仪读数和与静止状态的对应加速计所输出的所有数值的平均值,根据所获取的陀螺仪读数、所获取的平均值和校准地重力加速度,采用lm算法实现imu误差参数使用期间的持续校准;本技术公开的方法,可在imu使用过程中不断对其误差参数进行持续校准,使imu的误差参数在使用过程中均保持在一个相对准确的状态,大幅降低出厂前误差参数的校准工作量,节省人力、物力和财力,且可使imu的误差参数更贴合实际使用场景,提高用户的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!