多机器人相对位置的估计方法及系统
本发明涉及的是一种工业自动化领域的技术,具体是一种多机器人相对位置的估计方法及系统。
背景技术:
1、多机器人的定位和协同问题是目前复杂且棘手的工业难题,多机器人协同定位是指一组机器人共同确定他们相对于全局坐标系的位置,以实现协同任务。在过去的技术中,使用的方法可以概括为集中式定位、全局定位和集体控制方法。但现有集中式定位技术会将得到的误差进行累计,将导致累积误差的不断扩大,影响定位效果;全局定位技术则要求每个机器人分别需要使用完全一致的算法和配置,这将导致整体一致性难以满足的问题;而集体控制技术则完全固定参数设置,不具备迁移性和可维护性的不足。
技术实现思路
1、本发明针对现有技术的上述问题,提出一种多机器人相对位置的估计方法及系统,使用可靠的点云聚类识别技术和非线性优化方法能够使多机器人集群实现高效的任务协作、更加精确、鲁棒的协同定位。提高多机器人整体的认知水平和团队效率。
2、本发明是通过以下技术方案实现的:
3、本发明涉及一种多机器人相对位置的估计方法,通过配置每个机器人采用激光雷达采集一定时间段内传感器的周围点云信息后,转换为齐次变换矩阵形式的相对距离和角度信息的同时,对点云信息进行聚类运算生成对应的标识符;再将每个机器人的相对距离和角度信息通过配对优化算法进行匹配,匹配方法的实现通过构造优化模型并使用非线性最小二乘法的levenberg-marquardt算法求解得到聚类标识和每个机器人的对应关系。
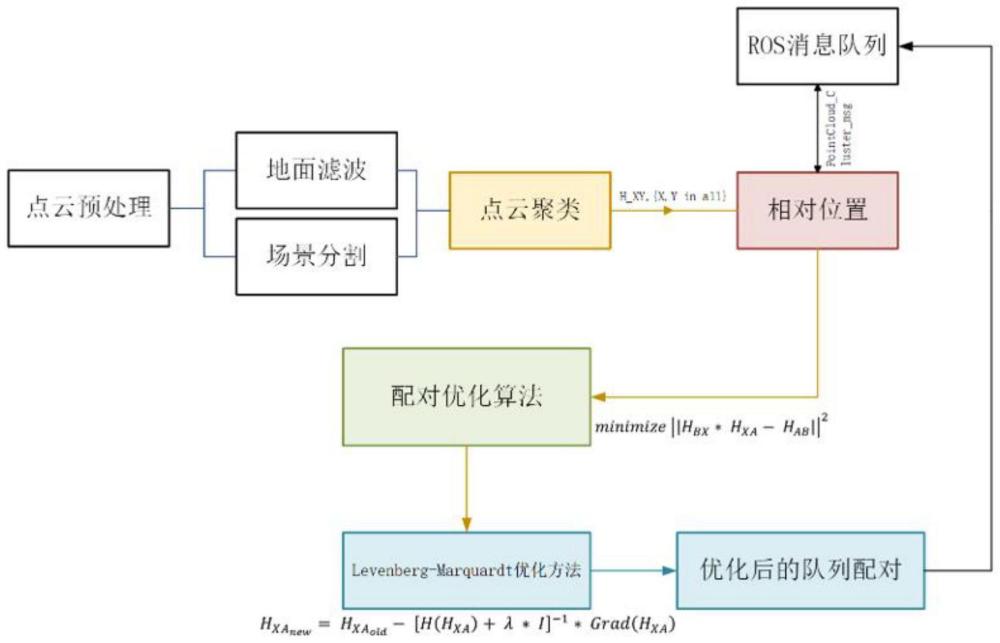
4、本发明涉及一种实现上述方法的系统,包括:点云预处理模块、点云聚类模块、消息通信模块和配对算法模块、其中:点云预处理模块根据激光雷达传感器得到的点云信息进行地面滤波处理,得到过滤掉地面点的滤地点云后,再将地面滤波之后得到的点云进行场景的筛选,删除部分离散点得到更加集中和精准的目标点云信息;点云聚类模块将目标点云信息进行聚类运算,得到每个聚类离自身坐标系的距离和角度信息;消息通信模块根据每个机器人中消息队列中的信息,通过局域网进行及时的发布自身点云聚类后得到的聚类结果并接收其他机器人的点云聚类后得到的聚类结果;配对算法模块根据聚类结果构建非线性优化函数,根据最小化不同机器人之间的距离和角度关系来完成机器人之间的配对,使得每个机器人得到和其他机器人的相对位置关系。
5、技术效果
6、本发明通过基于非线性优化函数的配对,可以实现机器人在完全未知的环境下确认自己的位置,并且可以实现多机器人交互进而帮助其他机器人也确认彼此之间的位置,这个办法相较于其他的协同定位算法而言,可以极大的降低对环境信息的依赖和传感器的依赖,实际的应用场景是,有多个机器人的复杂环境下,只要有一种任何一台机器人确立的自己的全局位置,就能够通过本发明的相对位置估计算法得到所有其他机器人的全局位置,进而能够执行更加复杂的任务。
技术特征:
1.一种多机器人相对位置的估计方法,其特征在于,通过配置每个机器人采用激光雷达采集一定时间段内传感器的周围点云信息后,转换为齐次变换矩阵形式的相对距离和角度信息的同时,对点云信息进行聚类运算生成对应的标识符;再将每个机器人的相对距离和角度信息通过配对优化算法进行匹配,匹配方法的实现通过构造优化模型并使用非线性最小二乘法的levenberg-marquardt算法求解得到聚类标识和每个机器人的对应关系。
2.根据权利要求1所述的多机器人相对位置的估计方法,其特征是,具体包括:
3.根据权利要求2所述的多机器人相对位置的估计方法,其特征是,所述的相对距离和角度信息使用齐次变换矩阵表示。
4.根据权利要求2所述的多机器人相对位置的估计方法,其特征是,所述的消息队列通信机制,具体包括:
5.根据权利要求1或2所述的多机器人相对位置的估计方法,其特征是,所述的levenberg-marquardt算法具体为:其中:为更新后的估计的hxa矩阵;为上一次迭代中的hxa矩阵的估计;h()为目标函数j(hxa)关于hxa的hessian二阶导数矩阵,以描述目标函数的曲率;grad()为目标函数j(hxa)关于hxa的梯度,即j对hxa的一阶导数;λ为一个正则化参数,即levenberg-marquardt参数,i为单位矩阵。
6.根据权利要求5所述的多机器人相对位置的估计方法,其特征是,当λ较小时,算法更趋向于使用牛顿法,而当λ较大时,算法更趋向于使用梯度下降法。
7.根据权利要求1所述的多机器人相对位置的估计方法,其特征是,所述的配对信息是指:比如机器人a接收到机器人b发来的聚类的位置信息h_bx,机器人a通过配对算法知道自己的一个点云聚类h_ax就是代表机器人b,那么a会发布自己的与机器人b配对的点云聚类的id和机器人b发出的点云中属于机器人a的点云聚类的id。
8.一种实现权利要求1-7中任一所述方法的多机器人相对位置的估计系统,其特征在于,包括:点云预处理模块、点云聚类模块、消息通信模块和配对算法模块、其中:点云预处理模块根据激光雷达传感器得到的点云信息进行地面滤波处理,得到过滤掉地面点的滤地点云后,再将地面滤波之后得到的点云进行场景的筛选,删除部分离散点得到更加集中和精准的目标点云信息;点云聚类模块将目标点云信息进行聚类运算,得到每个聚类离自身坐标系的距离和角度信息;消息通信模块根据每个机器人中消息队列中的信息,通过局域网进行及时的发布自身点云聚类后得到的聚类结果并接收其他机器人的点云聚类后得到的聚类结果;配对算法模块根据聚类结果构建非线性优化函数,根据最小化不同机器人之间的距离和角度关系来完成机器人之间的配对,使得每个机器人得到和其他机器人的相对位置关系。
技术总结
一种多机器人相对位置的估计方法及系统,通过配置每个机器人采用激光雷达采集一定时间段内传感器的周围点云信息后,转换为齐次变换矩阵形式的相对距离和角度信息的同时,对点云信息进行聚类运算生成对应的标识符;再将每个机器人的相对距离和角度信息通过配对优化算法进行匹配,匹配方法的实现通过构造优化模型并使用非线性最小二乘法的Levenberg‑Marquardt算法求解得到聚类标识和每个机器人的对应关系。本发明使用可靠的点云聚类识别技术和非线性优化方法能够使多机器人集群实现高效的任务协作、更加精确、鲁棒的协同定位。提高多机器人整体的认知水平和团队效率。
技术研发人员:张澍祺,袁汀,曹文祺
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!