激光雷达标定方法、装置、电子设备及可读存储介质与流程
本发明涉及激光雷达领域,具体而言,涉及一种激光雷达标定方法、装置、电子设备及可读存储介质。
背景技术:
1、码头岸边的集装箱起重机是专门用于集装箱码头对集装箱船进行装卸作业的专业设备,一般安装在港口码头岸边。又称岸桥、吊桥或者码头起重机。岸边集装箱起重机的装卸能力和速度直接决定码头作业生产率。
2、自动化扫描通过对集装箱起重机下方待作业区的船只或者集卡进行扫描,提供精确的船只舱位信息或者集卡位置信息,为港口信息化系统的自动化调度工作提供重要的数据支持。
3、激光雷达作为自动化扫描系统中的关键传感器,用于感知船舱/集卡的位置并确保自动控制的安全。然而,在激光雷达安装到集装箱起重机上后,需要进行雷达的位姿标定才能正常使用。因此,如何实现雷达与集装箱起重机之间的位姿标定是需要考虑的问题。
技术实现思路
1、本发明的目的在于提供一种激光雷达标定方法、装置、电子设备及可读存储介质,可以确定雷达坐标系转换到岸桥坐标系的总变换矩阵,来实现雷达与起重机吊具之间的位姿标定。
2、本发明的实施例可以这样实现:
3、第一方面,本发明提供一种激光雷达标定方法,包括:
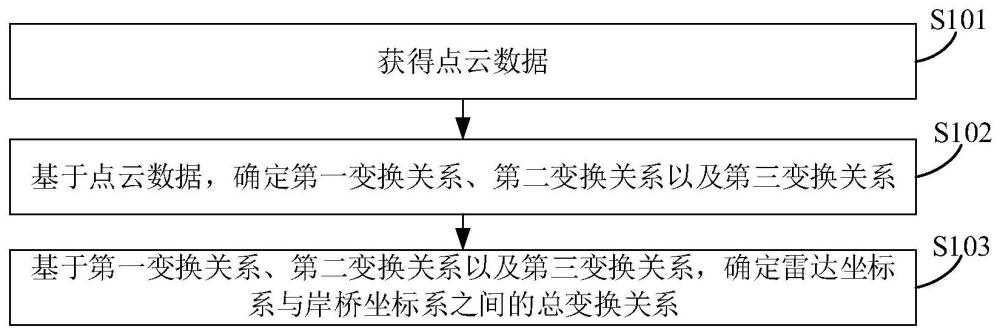
4、获得点云数据,所述点云数据是岸桥起重机上岸桥小车搭载的激光雷达对视野范围内的地面、起重机吊具以及大车柱体进行扫描得到的;
5、基于所述点云数据,确定第一变换关系、第二变换关系以及第三变换关系;其中,所述第一变换关系、所述第二变换关系以及所述第三变换关系分别反映雷达位置与吊具位置在三维空间的第一方向的变换关系、第二方向的变换关系以及第三方向的变换关系;
6、基于所述第一变换关系、所述第二变换关系以及所述第三变换关系,确定雷达坐标系与岸桥坐标系之间的总变换关系。
7、在可选的实施方式中,所述基于所述点云数据,确定第一变换关系、第二变换关系以及第三变换关系的步骤,包括:
8、基于所述点云数据中的地面点云,确定所述第一变换关系;
9、利用所述第一变换关系对所述点云数据进行转换,得到第一转换点云数据;
10、基于所述第一转换点云数据中两个参考平面的相关点云,确定所述第二变换关系;所述参考平面为与所述地面正交的平面;
11、利用所述第二变换关系对所述第一转换点云数据进行转换,得到第二转换点云数据;
12、基于所述第二转换点云数据中起重机吊具的吊具点云,确定所述第三变换关系。
13、在可选的实施方式中,所述基于所述点云数据中的地面点云,确定所述第一变换关系的步骤,包括:
14、从所述点云数据中采样出至少三个地面点云;
15、基于所述至少三个地面点云,拟合所述地面的平面方程;
16、基于所述地面的平面方程,获得所述地面的法向量以及所述激光雷达与地面之间的高度值;
17、计算所述地面的法向量转换为所述岸桥坐标系的z轴单位法向量时所需的第一旋转矩阵;
18、基于所述第一旋转矩阵以及所述激光雷达与地面之间的高度值,确定所述第一变换关系。
19、在可选的实施方式中,基于所述第一转换点云数据中两个参考平面的相关点云,确定所述第二变换关系的步骤,包括:
20、从所述第一转换点云数据中采样出两个参考平面的多个相关点云;所述两个参考平面为所述第一点云数据中表征的两个大车柱体的内侧面,地面和地面的大车轨道均垂直于所述两个大车柱体的内侧面;
21、基于所述两个参考平面的多个相关点云,分别拟合出所述两个参考平面的平面方程;
22、将所述两个参考平面的平面方程进行参数平均,获得中间平面方程;
23、对所述中间平面方程的z方向进行置零处理,得到平移平面的平面方程;
24、基于所述平移平面的平面方程,获得所述平移平面的法向量以及y方向偏移量;
25、计算所述平移平面的法向量转换为所述岸桥坐标系的y轴单位法向量时所需的第二旋转矩阵;
26、基于所述第二旋转矩阵以及所述平移平面的y方向偏移量,确定所述第二变换关系。
27、在可选的实施方式中,所述基于所述第二转换点云数据中起重机吊具的吊具点云,确定所述第三变换关系的步骤,包括:
28、从所述第二转换点云数据中分割出起重机吊具的所有吊具点云;
29、将每个所述吊具点云的z轴坐标值置为0后进行网格降采样处理,得到分布均匀的多个采样点云;
30、确定所述多个采样点云的质心坐标;
31、基于所述质心坐标,确定所述第三变换关系。
32、在可选的实施方式中,所述基于所述第一变换关系、所述第二变换关系以及所述第三变换关系,确定雷达坐标系与岸桥坐标系之间的总变换关系的步骤,包括:
33、将所述第一变换关系、所述第二变换关系以及所述第三变换关系各自的变换矩阵依次相乘,得到所述总变换关系。
34、第二方面,本发明提供一种激光雷达标定装置,包括:
35、获取模块,用于获得点云数据,所述点云数据是岸桥起重机上岸桥小车搭载的激光雷达对视野范围内的地面、起重机吊具以及大车柱体进行扫描得到的;
36、处理模块,用于基于所述点云数据,确定第一变换关系、第二变换关系以及第三变换关系;其中,所述第一变换关系、所述第二变换关系以及所述第三变换关系分别反映雷达位置与吊具位置在三维空间的第一方向的变换关系、第二方向的变换关系以及第三方向的变换关系;
37、合并模块,用于基于所述第一变换关系、所述第二变换关系以及所述第三变换关系,确定雷达坐标系与岸桥坐标系之间的总变换关系。
38、在可选的实施方式中,所述处理模块,具体用于:
39、基于所述点云数据中的地面点云,确定所述第一变换关系;
40、利用所述第一变换关系对所述点云数据进行转换,得到第一转换点云数据;
41、基于所述第一转换点云数据中两个参考平面的相关点云,确定所述第二变换关系;所述参考平面为与所述地面正交的平面;
42、利用所述第二变换关系对所述第一转换点云数据进行转换,得到第二转换点云数据;
43、基于所述第二转换点云数据中起重机吊具的吊具点云,确定所述第三变换关系。
44、第三方面,本发明提供一种电子设备,包括:存储器和处理器,所述存储器存储有软件程序,当所述电子设备运行时所述处理器执行所述软件程序以实现如前述第一方面所述的激光雷达标定方法。
45、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前述第一方面所述的激光雷达标定方法。
46、与现有技术相比,本发明实施例提供了一种激光雷达标定方法、装置、电子设备及可读存储介质,首先获得激光雷达扫描的点云数据,雷达坐标系该点云数据是岸桥起重机上岸桥小车搭载的激光雷达对视野范围内的地面、起重机吊具以及大车柱体进行扫描得到的;接着基于点云数据,确定第一变换关系、第二变换关系以及第三变换关系;最后基于第一变换关系、第二变换关系以及第三变换关系,确定总变换关系。由于,第一变换关系、第二变换关系以及第三变换关系可以分别反映雷达位置与吊具位置在三维空间的第一方向的变换关系、第二方向的变换关系以及第三方向的变换关系;所以最终确定的总变换关系可以实现雷达坐标系到岸桥坐标系的转换,从而有助于实现雷达与起重机吊具之间的位姿标定。
- 还没有人留言评论。精彩留言会获得点赞!