一种走航式雷达波浪监测系统及监测方法
本发明涉及船用水文气象观测领域,特别涉及一种走航式雷达波浪监测系统及监测方法。
背景技术:
1、在众多海洋观测要素中,海洋波浪是最重要且复杂的一种海洋水文要素,也是物理海洋学研究的重要内容之一,对海洋预报、海洋工程、防灾减灾、海洋权益维护、航海安全和保障海上军事等领域存在重要影响。开展波浪监测技术和方法研究,实现对波浪的高精度快速实时测量,可以有效获取海上的波浪信息,进行海况预报,有助于提高港口的灾害防范能力,为沿海港口、码头生产作业和生命财产的安全提供保障,为国家经济快速稳定增长创造条件,具有十分重要的意义。
2、目前,波浪现场监测的方式主要为固定点式。固定点式的监测装置包括波浪浮标、座底式多普勒流速剖面仪(adcp)、测波杆以及gnss测波浮标等方式,其中利用浮标对波浪进行测量时,一般采用三参数波浪估计谱的方式,通过内置的加速度计获取位移参数带入波浪谱来实现波浪的监测,该方式测量原理简单且精度较高。adcp等水下测量仪器则是根据多普勒效应实现对水体的流速测量,后通过迭代最大似然方法估计波浪谱。实际一般通过多个高频声波发射器构成n+1个波束阵列的测量模式。其中,1为垂直测量、n为倾斜测量,且阵列法得测量数据组成更为丰富。但是上述测量波浪的方法,都难以避免和波浪或海水直接接触,这就造成仪器部署安装困难,仪器维护成本高,难以满足长期稳定的测量需求。
3、随着雷达技术的广泛应用,利用雷达测波的方法也逐渐成熟,目前常用的监测装置是x波段雷达测波装置,利用雷达测波实现了与海面的非接触,提高了测量效率,能够实现实时、长期稳定的测量。但是该装备使用功耗大,体积较大,测量精度低且易受天气影响。后续有三点阵列式水位计垂直测量波浪的方法缩小装置体积、降低了功率、提高了计算效率,其采用纯物理公式的方法对波浪进行数据处理,虽然提高了计算效率,但是也导致测量的精度极大地降低,同时测量波向时,测量初始点的选取不同也会造成较大的测量误差,对于多变的海上环境,难以实现走航式精确测量波浪。
技术实现思路
1、为解决上述技术问题,本发明提供了一种走航式雷达波浪监测系统及监测方法,以达到可以实现长期稳定的海上走航式常态化观测需求,提高测量准确度的目的。
2、为达到上述目的,本发明的技术方案如下:
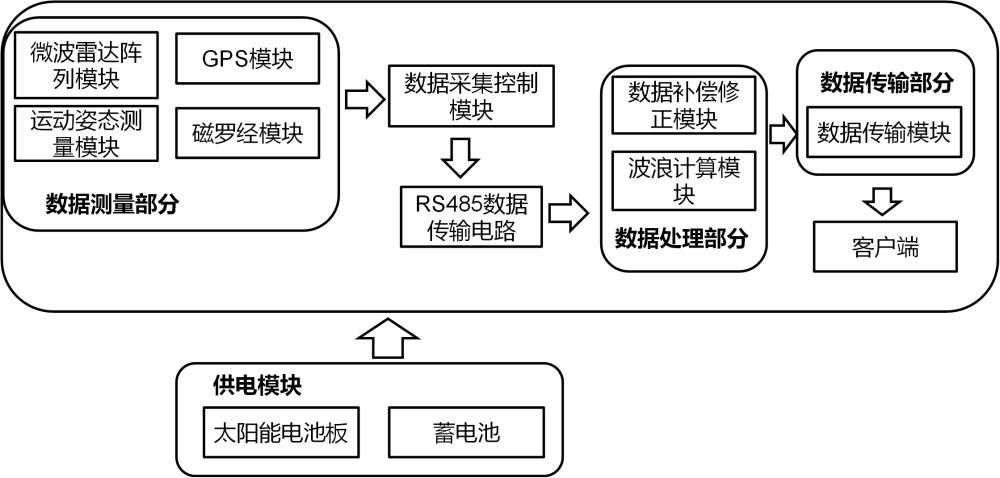
3、一种走航式雷达波浪监测系统,包括安装在船体上的固定支架和安装在固定支架上的微波雷达阵列模块、运动姿态测量模块、磁罗经模块、gps模块、数据采集控制模块、数据补偿修正模块、波浪计算模块、数据传输模块以及供电模块;所述微波雷达阵列模块由三个微波雷达模块a、b、c组成,其中微波雷达模块a垂直于水面安装,微波雷达模块b和微波雷达模块c分别安装于微波雷达模块a的右前方和左前方,三者构成以微波雷达模块a为顶点,微波雷达模块b、微波雷达模块c到微波雷达模块a的距离均为l,且夹角为β的等腰三角形,且三者位于同一水平高度上;所述微波雷达模块b和微波雷达模块c分别沿微波雷达模块a-b的延伸方向和微波雷达模块a-c的延伸方向倾斜安装,且与垂直方向的夹角为α。
4、上述方案中,所述微波雷达阵列模块、运动姿态测量模块、磁罗经模块、gps模块均与数据采集控制模块进行相连,数据采集控制模块与数据补偿修正模块相连,数据补偿修正模块与波浪计算模块相连,波浪计算模块与数据传输模块相连,并通过有线或无线的形式,进行数据发送和传输;供电模块为整个监测系统提供所需的电能;
5、所述运动姿态测量模块安装于微波雷达模块a的顶部,用于测量微波雷达模块a的运动特性,进而对因船体姿态运动造成微波雷达信号观测产生的误差进行补偿修正;
6、所述磁罗经模块和gps模块用于测量经纬度参数、协调世界时间以及微波雷达阵列模块的方位信息,磁罗经模块的基线与微波雷达模块b和c连线的法线相重合;
7、所述数据采集控制模块用于获取微波雷达阵列模块输出的波浪相对距离、相对位移参数,并按照统一格式进行存储,为波浪计算提供输入参数;获取运动姿态数据,为微波雷达模块测量参数优化提供矫正数据;获取微波雷达阵列模块的方位信息,为真实波浪方向提供基准点,同时,向微波雷达阵列模块发送控制命令,设置微波雷达阵列模块的监测参数;
8、所述数据补偿修正模块实现对微波雷达阵列模块的姿态修正、方位转换和对倾斜安装微波雷达模块测量距离的垂直映射,通过几何关系转化为采用跨零点法或谱矩法计算波浪波高、波周期所需要的数据和利用波浪方向谱计算波浪波向参数所需的数据;结合磁罗经模块和gps模块获得的方位信息,转化为在北-东方向上波浪的实际运动状态;
9、所述波浪计算模块根据经过姿态优化过的微波雷达模块测量参数,采用时域分析方法或频域分析方法,获得波高和波周期相关参数,采用波浪谱理论,获得波向参数;
10、所述数据传输模块用于将获取的姿态信息、方位信息、波高、波周期和波向参数进行统一编码,通过有线或无线方式传输到指定客户端,同时,支持传输客户端控制命令到数据采集控制模块;
11、所述供电模块为上述模块的正常工作提供电能,包括蓄电池和太阳能电池板、风力发电机、燃料电池。
12、一种走航式雷达波浪监测方法,采用如上所述的一种走航式雷达波浪监测系统,包括如下步骤:
13、步骤一,将该监测系统安装固定在船体上,微波雷达阵列模块利用多普勒原理收发电磁波信号实现数据测量,利用相干与非相干积累算法提高信噪比,利用sigma-deltaadc技术把模拟信号转换为数字信号;
14、步骤二,数据采集控制模块处理数字信号得到波浪与微波雷达模块之间的相对距离参数以及波浪相对微波雷达模块的位移参数和速度参数;
15、步骤三,数据补偿修正模块利用运动姿态测量模块所测数据结果对上述参数进行优化补偿,得到垂直方向上波浪距离微波雷达模块的垂直高度参数;得到三维笛卡尔坐标系下,波浪与微波雷达模块沿三维坐标轴方向上的三处相对位移分量;
16、步骤四,利用跨零点法或谱矩法对波浪高度参数分析得到波高、波周期;采用三参数波浪谱估计法求解三维坐标系中的波浪方向;或者采用分析波浪波面变换规律的坡度分析法来确定波向;最后,结合磁罗经模块和gps模块的方位信息优化波浪方向,得到实际以正北方向为基准的实际波浪方向;
17、步骤五,对姿态信息、方位信息、波高、波周期以及波向进行统一编码,之后通过无线通信的方式发送到岸边基站的指定客户端。
18、上述方案中,步骤二中,在雷达信号的模拟信号转变为数字信号后,对其进行处理得到波浪与微波雷达模块之间的相对距离、相对速度与相对位移参数;对于距离的处理通过分析一次收发电波信号的相位变换得到,或者通过分析收发信号之间的频率变换得到;对于速度和位移则采用发射和接收间隔固定时间的两段调频连续波脉冲,分析两次接收电波的相位变换得到。
19、上述方案中,步骤三中,首先,根据运动姿态测量模块测量得到的船体纵摇、横摇、升沉变化,修正微波雷达模块测量数据,优化为微波雷达阵列模块在水平面所测量的数据;之后,通过微波雷达模块安装角度,利用几何分析和矢量分析,将距离转换为垂直方向的相对距离,来得到波高,和波周期所需参数;将相对位移转换为三维坐标系(x、y、z)上的位移分量,实现三参数波浪谱所需位移参数的获得。
20、上述方案中,步骤四中,在波浪测量高度确定后,分析三个测量高度在波面上构成的三角面的坡度变换规律,统计得出波浪的移动方向;或者在三个方向的位移分量确定之后,获取一段时间的三处位移参数的时间序列,利用三参数法分析得到波浪方向;后续通过gps模块与磁罗经模块获得真实方位数据修正三维笛卡尔坐标系内的方向角度—定义的北向坐标轴与波向所构成的角度。
21、上述方案中,步骤四中,坡度分析法确定波向的步骤包括:
22、首先,选取微波雷达阵列模块在水平面所构成的三角形水平面的法线为基准;
23、其次,通过三个微波雷达模块测量的三处波面的不同高度构成一个倾斜于水平面的三角形,并分析该三角形的法线;
24、再次,若船体发生摇晃,则通过运动姿态测量模块的数据修正上述高度参数确保使微波雷达阵列模块为水平时的测量数据;
25、最后,以微波雷达阵列三角形修正后的法线为垂直于水平面参考法线l1,分析微波雷达模块测量三点波面高度所构成的倾斜三角形修正后法线l2与参考法线l1的关系来得到波向。
26、上述方案中,上述的关系分析主要为:分析法线l2与参考法线l1之间构成的夹角变换,从而构建一个经过参考法线l1且由法线l2与l1角度变化的垂直面,此时波浪的水平移动方向就位于该垂直面与水平面相交的线上。
27、进一步的技术方案中,在波高、波周期确定后,选取一个周期内,法线l2与法线l1平行,夹角为零,且位于波高处之后的数据用来分析波向,具体操作如下:
28、以参考法线l1为z轴在上述垂直面上建立二维坐标系,在法线重合时,开始进行数据分析,当法线l2与参考法线l1之间的夹角变大且倾向于x轴正方向时,则波浪方向为x轴负方向;当夹角变大但倾向于x轴负方向,则波浪方向为x轴正反向;
29、对于夹角的计算公式如下:
30、;
31、其中,和分别为微波雷达阵列平面和微波雷达模块测量三角面的法向量,为夹角且小于等于90°。
32、更进一步的技术方案中,波向分析的最终结果应该以参考法线z轴,以磁罗经模块和gps模块所得水平面真实方位信息构建三维笛卡尔坐标系,其中,x轴为东向,y轴为北向,从而确定准确的波向与正北偏离角度。
33、通过上述技术方案,本发明提供的一种走航式雷达波浪监测系统及监测方法具有如下有益效果:
34、1、对比浮标式和adcp等触式测量技术,本发明采用微波雷达进行测量,其受天气影响小,功耗低,测量精度高,实现了海面波浪的非接触测量,极大降低了安装维护成本;并且采用三个小型微波雷达阵列极大提高了测量精度也降低测波装置的体积,便于实现走航式观测;
35、2、对比传统雷达测波技术,本发明采用微波雷达构成阵列,极大降低了功率,缩小了体积,提升了测量精度适合海上实时长期稳定的测量;
36、3、对比传统阵列水位计测量手段,本发明采用呈角度的雷达阵列进行测量,降低雷达之间的干扰,提高了波浪信息的获取丰富度且摒弃完全采用物理学公式分析波高移动来测量波向的方法,改用精确度更高,应用范围更广的波浪方向谱进行波浪的计算,或分析波浪波面坡度的精细变化得出波向,提高了装置的测量精度;
37、4、为了实现波浪波高、波周期以及波向的观测,本发明采用物理公式结合三参数波浪谱的方法提高波浪的监测精度。首先,选取两个雷达与波面构成测量角度,实现非垂直测量,这不仅降低了微波雷达信号之间的相互干扰,也能实现波浪相对速度、位移、距离准确测量;且一垂直加两倾斜的阵列测量方法使得监测数据组成更为丰富;
38、5、为了实现波浪方向的精确测量,本发明采用三参数波浪谱估计波浪方向,比起采用物理学公式直接计算,精度更高,实用性更广,且避免了物理学公式初始点选取不同所造成的误差影响;
39、6、为了实现波浪方向的实时测量,本发明采用研究波浪波面随波浪移动的变换规律,利用数学分析雷达阵列测量波面与雷达阵列所在水平面法线的夹角得出波浪的移动方向;
40、7、为了实现三参数法中位移参数的获取,利用多普勒效应,实现雷达对波浪相对速度与位移的精确测量,进而优化得到波浪谱所需的位移时间序列;
41、8、为了实现能够在海上复杂环境中的精确测量,本发明选择添加运动姿态测量模块、gps模块以及磁罗经模块实现对波浪波高、波周期以及波向的物理矫正和计算。
- 还没有人留言评论。精彩留言会获得点赞!