一种基于同步加速度计的同步带宽扩展方法及系统
本发明属于微机械系统及非线性动力学,具体涉及一种基于同步加速度计的同步带宽扩展方法及系统。
背景技术:
1、mems谐振式加速度计由于具有高精度、高灵敏度、准数字化输出等优势逐渐成为研究热点并被广泛应用。
2、目前单纯依靠优化传感器结构来提升谐振式传感器精度已较为困难,亟需探索新型的敏感机理来突破谐振式加速度计的精度限制。作为非线性效应中的特殊现象,同步被视为一种有效提高mems振荡器频率稳定性和降低相位噪声的手段。这为进一步提高谐振式传感器的性能提供了新的思路。同步带宽是同步现象中的一种重要特征,它是衡量同步持续范围的重要指标,同步的增强效果仅在同步带宽内有效。通常情况下,受限于耦合强度,同步带宽的很小。目前微机械谐振器中已报道的同步带宽的频率范围均不超过敏感元件谐振频率的3‰。对于同步传感技术而言,同步带宽的大小直接决定了同步增强传感器的工作范围,也限制了同步传感技术的进一步发展。为了使同步传感技术更具实用性,应增大同步带宽。
3、研究者开发了基于相位延迟和频率自追踪的两种同步带宽扩展技术。前者可以通过设置相位延迟来扩展同步带宽,然而这种方法对同步带宽的提升十分有限。后者采用基于焦耳热效应的频率调谐原理,通过pid反馈调节施加于mems谐振器两端的电势差来改变流过谐振器本体的电流,调节谐振器频率使之重新进入同步状态,在测量过程中传感器会在同步和非同步状态之间切换,进而影响测量结果。利用焦耳热效应扩展同步带宽本质上是通过调节谐振器温度来调节振荡器频率,调节过程不可避免地会引入热噪声,导致振荡器频率稳定性下降。因此亟需探索拓宽同步带宽新的手段。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于同步加速度计的同步带宽扩展方法及系统,用于解决同步带宽限制同步增强传感器工作范围,及现有同步带宽扩展方法对同步带宽提升有限且容易引入额外热噪声的技术问题。
2、本发明采用以下技术方案:
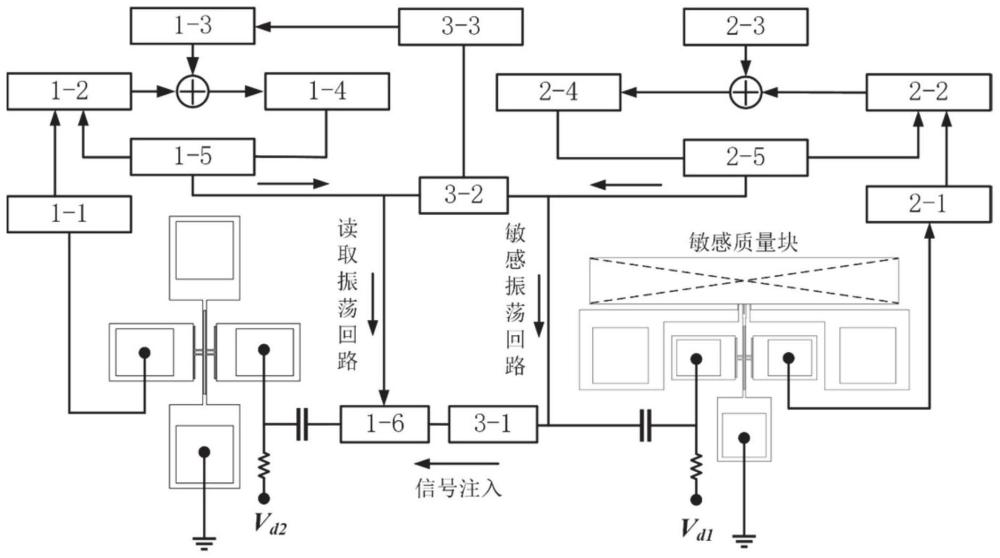
3、一种基于同步加速度计的同步带宽扩展系统,包括读取振荡回路和敏感振荡回路,敏感振荡回路的信号单向注入读取振荡回路中,读取振荡回路和敏感振荡回路的输出端经相位差解调模块连接自动相位延迟控制模块,自动相位延迟控制模块根据读取振荡回路和敏感振荡回路的相位差值确定控制方式以及相位延迟补偿形式,并调整读取振荡回路中的相位延迟,实现同步带宽扩展。
4、优选地,读取振荡回路包括第一跨阻放大器,第一跨阻放大器的输入端连接读取谐振器,输出端经第一鉴相器,第一环路pi控制器、第一数控振荡器和加法器后连接读取谐振器,实现闭环振荡。
5、更优选地,自动相位延迟控制模块经第一环路相位延迟与第一环路pi控制器连接。
6、优选地,敏感振荡回路包括第二跨阻放大器,第二跨阻放大器的输入端连接敏感谐振器,输出端经第二鉴相器,第二环路pi控制器和第二数控振荡器后连接敏感谐振器,实现闭环振荡。
7、更优选地,敏感振荡回路的信号经幅值控制器和加法器后注入读取振荡回路中,实现同步。
8、优选地,在未受加速度时,设置读取振荡回路的初始振荡频率等于敏感振荡回路频率,此时相位差θ等于-θ0,δ为同步带宽的大小;当相位差θ大于极值或小于时,振荡器失去同步。因此利用相位差θ来判断两个振荡回路是否即将失去同步。
9、更优选地,读取振荡回路和敏感振荡回路的相位差值满足以下条件:
10、
11、其中,δω表示受外界加速度后敏感振荡回路频率偏离读取振荡回路的初始振荡频率的大小。
12、优选地,敏感谐振器和读取谐振器均为双端固支的音叉梁,长度为10~500μm,单根音叉梁的宽度为3~5μm。
13、本发明的另一技术方案是,一种基于同步加速度计的同步带宽扩展方法,包括以下步骤:
14、s1、使敏感振荡回路与读取振荡回路同步,并设定同步过程中需要保持的目标相位差θ*;
15、s2、通过相位差解调模块获得实时相位差θ;
16、s3、对目标相位差θ*与实时相位差θ进行差值比较;
17、s4、阈值判断机制对解调的相位差进行判定,判断控制器采用何种控制方式,如果相位差误差的绝对值超过设置的阈值相位差则系统采用模糊控制;如果相位差误差的绝对值小于等于设置的阈值相位差则系统采用增量式pid控制;
18、s5、误差判定机制进行相位延迟判定后,控制器输出新的相位延迟对读取振荡回路的相位延迟进行正补偿或负补偿;
19、s6、将读取振荡回路中的相位延迟更新为新值并重新解调实时相位差θ,返回步骤s2循环执行。
20、优选地,步骤s5中,当采用增量式pid控制器时,读取振荡回路的相位延迟的调整判定标准为:
21、e>0
22、如果e>0成立则判定相位延迟需进行正补偿;如果不成立则判定相位延迟需进行负补偿,经过计算,pid控制器输出新的相位延迟
23、当采用模糊控制器时,计算相位差的误差变化率为:
24、ec=ei-ei-1
25、其中,ec为相位差的误差变化率,ei为当前相位差的误差,ei-1为前一次相位差的误差。
26、与现有技术相比,本发明至少具有以下有益效果:
27、一种基于同步加速度计的同步带宽扩展系统,通过解调同步后敏感振荡回路和读取振荡回路的相位差来判断两个振荡器是否即将失去同步,结合硅基谐振器中相位延迟和频率的对应关系,建立完整的算法体系实时调节读取振荡回路的相位延迟,保证同步加速度计中的敏感振荡回路和读取振荡回路始终保持同步状态,增大同步加速度计的工作范围;两个振荡回路基于相位反馈的形式搭建,可以实现高精度的振荡频率输出;相位解调模块用于获取敏感振荡回路和读取振荡回路的相位差信息,可以实现同步状态的准确判断。
28、进一步的,读取振荡回路使读取谐振器实现自激振荡,并与敏感振荡回路同步,抑制敏感振荡回路的噪声。
29、进一步的,敏感振荡回路使敏感谐振器实现自激振荡,当外界加速度变化引起谐振器本身频率变化时,敏感振荡回路的频率也将迅速随之变化,提升加速度传感器的检测效率和准确度。
30、进一步的,由于在同步过程中敏感振荡回路与读取振荡回路的频率始终相等,通过回路的频率信息难以判断敏感振荡器与读取振荡器是否即将失去同步。而同步后两个振荡回路的相位差为判断两个振荡器是否即将失去同步提供了依据。
31、进一步的,mems加速度计的单根音叉梁的长度为10~500μm,单根音叉梁的宽度为3~5μm,可有效保证敏感振荡回路与读取振荡回路之间的精确频率匹配,用于实现同步。
32、一种基于同步加速度计的同步带宽扩展方法,通过相位差解调模块获得实时相位差θ,自动相位延迟控制系统根据目标相位差θ*与实时相位差θ的关系,实时动态调整读取振荡回路的相位延迟使实时相位差维持在目标相位差附近,以此来扩展同步带宽。控制系统采用模糊pid控制器,当误差比较大时,使用模糊控制来快速使相位差快速达到设定值;当误差比较小时,采用pid控制进行微调,可以提高整个系统的控制精度。
33、综上所述,本发明首次提出自动相位延迟控制技术,结合硅基谐振器中相位延迟和振荡频率的关系建立完整的算法体系进行频率补偿,在不引入额外的热噪声以及增加功率的情况下,使敏感振荡回路和读取振荡回路始终保持同步状态,增大了同步加速度计的工作范围。
34、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!