一种自适应避障路径规划方法与系统
本发明涉及路径规划技术,尤其涉及一种自适应避障路径规划方法与系统。
背景技术:
1、机器人避障是指移动机器人在行走过程中,通过传感器感知到在其规划路线上存在静态或动态障碍物时,按照一定的算法实时更新路径,绕过障碍物,最后达到目标点
2、机器人路径规划指的是根据起始位置、终点位置和地图规划出一条行走距离最短的可通达路线,机器人路径规划的目标是通过环境感知与主动避障功能找到一条可行的最佳路径,此路径从起始点至终点在给定的工作空间中不与任何障碍物相交,同时要优化机器人运动路径,使其尽可能达到更短、更平滑的要求。
3、目前路径规划技术已经广泛应用于一些功能性的机器人,例如扫地机器人、传菜机器人等,这些机器人一般都具备按照规划路劲进行行走,并避开行驶路径中的障碍物的功能。
4、在仓库,餐厅,商场等封闭场景内,空间狭小,往来人员较多,同时环境容易改变,对于机器人的路径规划提出了挑战。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种自适应避障路径规划方法与系统,能够生成适合封闭场景内的行走路径,并且能够有效躲避周围行人。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种自适应避障路径规划方法,包括以下步骤:
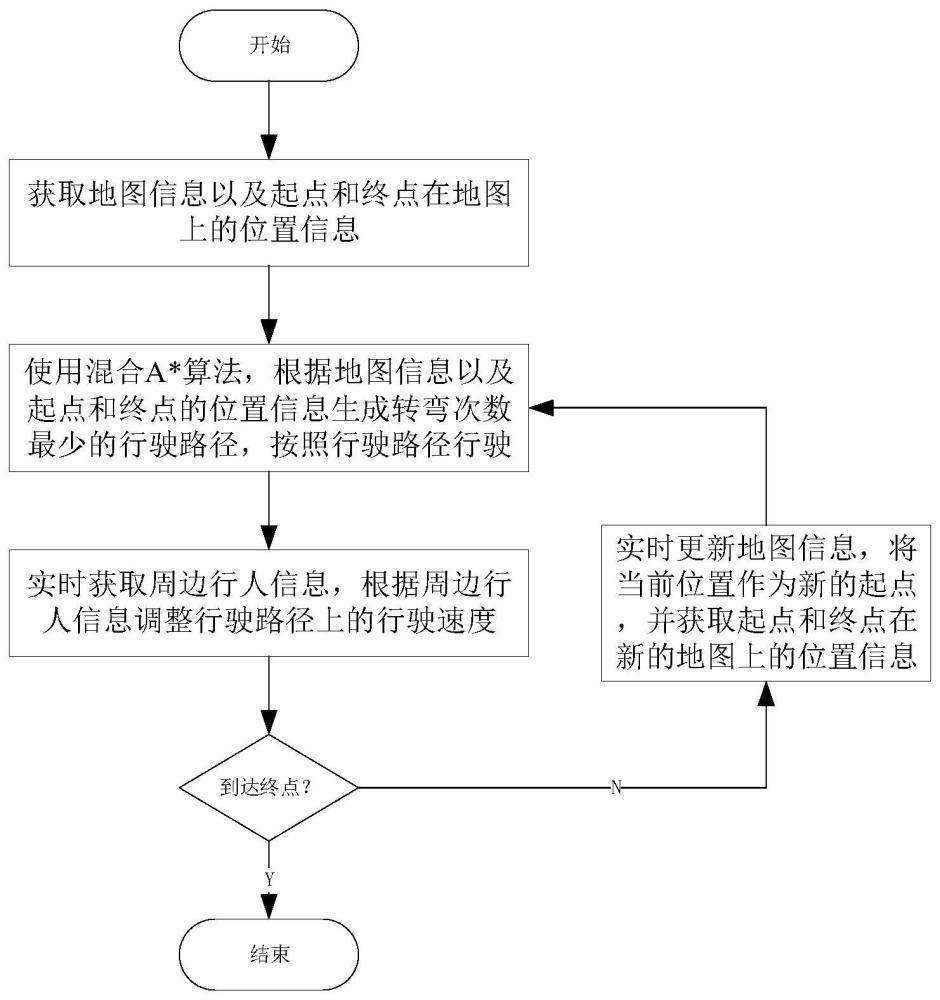
4、获取地图信息以及起点和终点在地图上的位置信息;
5、使用混合a*算法,根据地图信息以及起点和终点的位置信息生成转弯次数最少的行驶路径,按照行驶路径行驶;
6、实时获取周边行人信息,根据周边行人信息调整行驶路径上的行驶速度以躲避行人;
7、若未到达终点,实时更新地图信息,将当前位置作为新的起点,并获取起点和终点在新的地图上的位置信息,然后执行使用混合a*算法,根据地图信息以及起点和终点的位置信息生成转弯次数最少的行驶路径的步骤。
8、进一步的,生成转弯次数最少的行驶路径时,具体包括:从父节点向子节点搜索,选择运动方向不发生改变的子节点作为下一个父节点;若不存在运动方向不发生改变的子节点,将所有子节点中运动角度改变最小的子节点作为下一父节点。
9、进一步的,选择运动方向不发生改变的子节点作为下一个父节点时,具体包括:设定最优控制问题的代价函数,并设置约束条件,所述约束条件包括车辆运动学方程、车辆内在机械特性对应着状态/控制变量的容许作用区间、碰撞避免约束和机器人初末位置的状态和控制约束,将代价函数和约束条件联立求解,得到最优的行驶速度和角度。
10、进一步的,根据周边行人信息调整行驶路径上的行驶速度以躲避行人时,具体包括:
11、若检测到行人,使用行人的社会力模型对行人的运动轨迹进行预测,得到行人的预测轨迹;
12、若行人的预测轨迹与所述行驶路径不相交,则在行驶路径中保持行驶速度;
13、若行人的预测轨迹与所述行驶路径相交,预测行人速度,并根据行人速度、当前行驶速度,以及行人的预测轨迹与所述行驶路径交点与行人和机器人间的距离计算时间优势,若时间优势大于预设的时间优势阈值,则在行驶路径中保持行驶速度;
14、若时间优势小于预设的时间优势阈值,且行人的预测轨迹与所述行驶路径交点与机器人间的距离大于舒适刹车距离,则在行驶路径中减速行驶;
15、若时间优势小于预设的时间优势阈值,且行人的预测轨迹与所述行驶路径交点与机器人间的距离小于舒适刹车距离并大于最大制动距离,则在行驶路径中急停;
16、若时间优势小于预设的时间优势阈值,且行人的预测轨迹与所述行驶路径交点与机器人间的距离小于最大制动距离,则在行驶路径中加速行驶。
17、进一步的,预测行人速度包括:若行人为一个,预测单人状态下行人速度,单人状态下行人速度的表达式为:
18、
19、其中,τ为切线方向,为行人理想速度,为行人理想方向,为障碍物对于行人的排斥力,为行人间的相互作用力。
20、进一步的,预测行人速度包括:若行人为两个及以上,预测团体状态下行人速度,团体状态下行人速度的表达式为:
21、
22、其中,为障碍物对于行人的排斥力,τ为切线方向,为行人理想速度,为行人理想速度方向,为行人间的相互作用力,β1为描述团体间成员相互交流强度的参数,αi为头部旋转角度,为团体的质量中心对于行人i的吸引力,为团体成员间的排斥力。
23、进一步的,所述时间优势的表达式如下:
24、
25、其中,dy为行人的预测轨迹与所述行驶路径交点与行人间的距离,vp为行人速度,d为行人的预测轨迹与所述行驶路径交点与机器人间的距离,vv为机器人行驶速度。
26、进一步的,在行驶路径中减速行驶时,包括:
27、计算期望速度,表达式如下:
28、
29、其中,acmf为预设的舒适减速加速度,d为行人的预测轨迹与所述行驶路径交点与机器人间的距离,d0为在行驶路径中减速行驶时行人的预测轨迹与所述行驶路径交点与机器人间的距离初始值,v0为在行驶路径中减速行驶时机器人行驶速度的初始值;
30、计算减速加速度,表达式如下:
31、a=-acmf+kp(v-vdes)
32、其中,acmf为预设的舒适减速加速度,v为机器人行驶速度,vdes为期望速度,kp为预设的比例系数;
33、根据减速加速度进行减速,直到机器人行驶速度达到期望速度。
34、进一步的,在行驶路径中急停时,包括:
35、计算期望速度,表达式如下:
36、
37、其中,d为行人的预测轨迹与所述行驶路径交点与机器人间的距离,d0为在行驶路径中减速行驶时行人的预测轨迹与所述行驶路径交点与机器人间的距离初始值,v0为在行驶路径中减速行驶时机器人行驶速度的初始值;
38、计算减速加速度,表达式如下:
39、
40、其中,d为行人的预测轨迹与所述行驶路径交点与机器人间的距离,v为机器人行驶速度,vdes为期望速度,kp为预设的比例系数;
41、根据减速加速度进行减速,直到机器人行驶速度达到期望速度。
42、本发明还提出一种自适应避障路径规划系统,包括机器人,所述机器人被配置以执行任一所述的自适应避障路径规划方法。
43、与现有技术相比,本发明的优点在于:
44、本发明使用混合a*算法根据地图信息生成转弯次数最少的行驶路径,减小了机器人行驶过程中与静态障碍物发生碰撞的几率;
45、本发明在机器人行驶过程中,实时获取周边行人信息,并根据周边行人信息调整行驶路径上的行驶速度,能够有效的躲避行人;
46、本发明在机器人行驶过程中,实时获取新的地图信息,并以此来更新行驶路径,从而有效适应环境改变。
技术特征:
1.一种自适应避障路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自适应避障路径规划方法,其特征在于,生成转弯次数最少的行驶路径时,具体包括:从父节点向子节点搜索,选择运动方向不发生改变的子节点作为下一个父节点;若不存在运动方向不发生改变的子节点,将所有子节点中运动角度改变最小的子节点作为下一父节点。
3.根据权利要求1所述的自适应避障路径规划方法,其特征在于,选择运动方向不发生改变的子节点作为下一个父节点时,具体包括:设定最优控制问题的代价函数,并设置约束条件,所述约束条件包括车辆运动学方程、车辆内在机械特性对应着状态/控制变量的容许作用区间、碰撞避免约束和机器人初末位置的状态和控制约束,将代价函数和约束条件联立求解,得到最优的行驶速度和角度。
4.根据权利要求1所述的自适应避障路径规划方法,其特征在于,根据周边行人信息调整行驶路径上的行驶速度以躲避行人时,具体包括:
5.根据权利要求4所述的自适应避障路径规划方法,其特征在于,预测行人速度包括:若行人为一个,预测单人状态下行人速度,单人状态下行人速度的表达式为:
6.根据权利要求4所述的自适应避障路径规划方法,其特征在于,预测行人速度包括:若行人为两个及以上,预测团体状态下行人速度,团体状态下行人速度的表达式为:
7.根据权利要求4所述的自适应避障路径规划方法,其特征在于,所述时间优势的表达式如下:
8.根据权利要求4所述的自适应避障路径规划方法,其特征在于,在行驶路径中减速行驶时,包括:
9.根据权利要求4所述的自适应避障路径规划方法,其特征在于,在行驶路径中急停时,包括:
10.一种自适应避障路径规划系统,其特征在于,包括机器人,所述机器人被配置以执行权利要求1~9任一所述的自适应避障路径规划方法。
技术总结
本发明公开了一种自适应避障路径规划方法与系统,方法包括以下步骤:获取地图信息以及起点和终点在地图上的位置信息;使用混合A*算法,根据地图信息以及起点和终点的位置信息生成转弯次数最少的行驶路径,按照行驶路径行驶;实时获取周边行人信息,根据周边行人信息调整行驶路径上的行驶速度以躲避行人;若未到达终点,实时更新地图信息,将当前位置作为新的起点,并获取起点和终点在新的地图上的位置信息,然后执行使用混合A*算法,根据地图信息以及起点和终点的位置信息生成转弯次数最少的行驶路径的步骤。本发明能够生成适合封闭场景内的行走路径,并且能够有效躲避周围行人。
技术研发人员:杨钦文,肖罡,田佳兴,黄晋,唐耀琛
受保护的技术使用者:湖南大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!