基于图像叠帧法的转盘式PIV校准装置的制作方法
本发明涉及流体流速测量仪校准,更具体的说是涉及基于图像叠帧法的转盘式piv校准装置。
背景技术:
1、粒子图像测速技术(particle image velocimetry,piv)是通过相机记录两次示踪粒子的位置,然后由图像处理分析技术得到粒子位移,由位移和相机拍摄两幅图像之间的时间间隔计算出粒子运动的速度,其特点主要是全流场瞬态非接触测量,并且能够定量测量流场流动的速度,具有较高的测量精度,适用于一些复杂流场的测量。
2、piv测量系统主要由粒子发生系统、图像采集系统和图像处理系统三部分组成,粒子发生系统其主要的功能是散布示踪粒子在流场中,图像采集系统能够准确采集示踪粒子在流场中的运动位置,图像处理系统则通过采集到的图像由相关算法计算出粒子运动的距离。由于在piv测量过程中引入的测量误差影响因素较多,比如piv设备的硬件、粒子散布的情况、人为操作的经验、光学环境、图像处理算法等,因此对其测量准确性的判断具有一定难度,而现如今piv的应用越来越广泛,大量应用于航空航天飞行器复杂的外形流动、动力燃烧中的多相流、大型风洞流场流速、船舶发动机尾流。
3、虽然piv厂家在仪器出厂前已经对其进行了系统标定,但由于不同厂家各自算法的差异,还没有一个普遍的通用准则出现。
4、因此,研究出一种能够有效提高测量准确性,使测量结果更具有可靠性的基于图像叠帧法的转盘式piv校准装置是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种能够有效提高测量准确性,使测量结果更具有可靠性的基于图像叠帧法的转盘式piv校准装置。
2、为了实现上述目的,本发明采用如下技术方案:
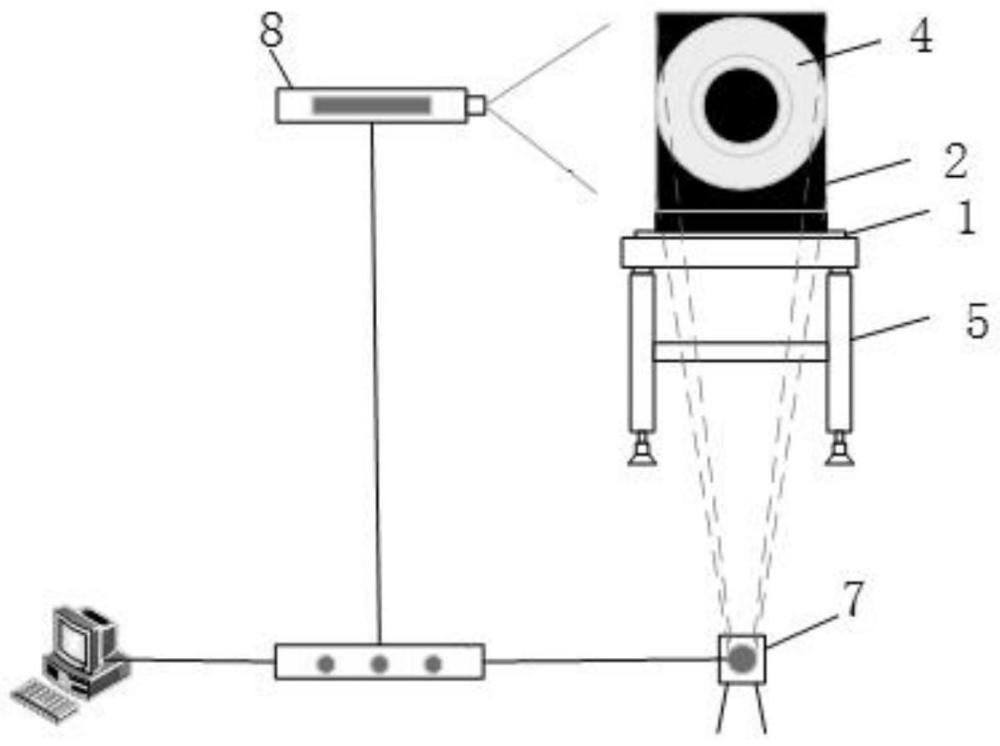
3、基于图像叠帧法的转盘式piv校准装置,包括:
4、底座,
5、挡板,所述挡板竖直固定于所述底座的顶部;
6、伺服电机,所述伺服电机固定于所述挡板的侧面;
7、石英玻璃转盘,所述石英玻璃转盘的表面标记有多个粒子;所述石英玻璃转盘和伺服电机分别位于所述挡板的相对两侧;所述伺服电机的输出端穿过所述挡板与石英玻璃转盘相连接;
8、控制箱,所述控制箱与伺服电机相连接。
9、采用上述技术方案的有益效果是,本发明中石英玻璃转盘通过挡板固定在底座上,使得石英玻璃转盘具有较高的稳定性,可以使piv多次测量的结果具有很好的一致性。
10、优选的,所述底座的底部设有光学平台,所述底座与光学平台固定连接;所述挡板的表面积大于石英玻璃转盘的表面积,且所述挡板遮挡整个所述石英玻璃转盘。挡板对石英玻璃转盘进行遮挡,在做校准实验时,可以使石英玻璃转盘上的粒子更加的清晰。
11、优选的,所述石英玻璃转盘的中心位置设有夹具,所述夹具与伺服电机的输出端相连接。
12、优选的,所述控制箱包括:箱体、触摸屏、控制器、驱动器以及编码器,所述控制器、驱动器以及编码器均设置于箱体内部,所述触摸屏设置于箱体表面;触摸屏与控制器相连接,控制器与驱动器连接,驱动器与伺服电机相连接,所述编码器与伺服电机相连,检测石英玻璃转盘的运动速度,编码器与控制器连接,将检测的脉冲信号反馈给控制器,控制器将石英玻璃转盘的速度信号传输给触摸屏。
13、优选的,石英玻璃转盘表面粒子的生成方法如下:
14、1)模拟粒子生成的方式:通过python编程得到不同粒子的坐标位置,首先生成极坐标系,通过随机数生成第一个粒子点的角度及半径,然后将极坐标转换为直角系坐标表示;同理生成第二个随机数,计算第二个粒子点和第一个粒子点的直线距离,若距离大于等于最小间距,则记录该点;以此类推,记录多个粒子点;
15、2)步骤1)中粒子点计算结束后,将每个粒子点坐标导入cad中,生成粒子环模拟图,得到随机模拟示踪粒子;
16、3)采用co2激光器对石英玻璃转盘进行激光多点雕刻:首先,将生成的cad图像导入co2激光器的控制软件,由co2激光器自行运行对石英玻璃转盘进行雕刻。
17、优选的,石英玻璃转盘表面粒子的生成方法的步骤1)中生成的粒子点的半径为60~100mm,角度值的范围为0~2π雕刻;在设置石英玻璃转盘粒子个数时,在设置的最小判别区域内,应保证判别区域内的粒子点数量大于等于5。
18、优选的,石英玻璃转盘表面粒子的生成方法的步骤2)中雕刻处的相邻粒子之间的间距大于0.5mm。
19、优选的,piv设备的校准方法如下:
20、1)将雕刻有粒子的石英玻璃转盘与夹具固定,并将石英玻璃转盘放置在挡板侧面,且与伺服电机相对布置,通过夹具将石英玻璃转盘与伺服电机的输出轴相连接;然后将挡板通过底座固定在光学平台上;石英玻璃转盘安装完成后,在石英玻璃转盘的正前方布设相机,在石英玻璃转盘的侧面设置片光源激光器,为石英玻璃转盘提供光源;
21、2)采用图像叠帧的方式将石英玻璃转盘的线速度与piv测量的速度相比对:计算相机所需要采集石英玻璃转盘照片的次数p,其中拍照次数主要由判别区域的边长l所确定,其计算的方式为石英玻璃转盘外径的圆周长除判别区域边长后向上取整,其计算公式为:
22、
23、由piv多次测量采集石英玻璃转盘中示踪粒子的线速度,当拍摄的图像组数大于等于p时,覆盖石英玻璃转盘上的所有粒子;
24、计算半径方向上同一位置上单个判别区域的平均速度,计算公式如下:
25、
26、式中:vi为piv每次测量中一个判别区域的速度;
27、对半径方向上piv测量区域的判别区域进行计数,得到在半径方向上一共有n个判别区域,由式3计算得到测量区域中每个判别区域速度为计算piv在半径方向上测得的平均速度,其计算公式为:
28、
29、由piv测量的方式,piv测量时,石英玻璃转盘提供的标准速度vst计算为石英玻璃转盘在粒子环内外径到内径沿半径方向上的线积分,其计算公式为:
30、
31、由公式得到,piv测量石英玻璃转盘的标准速度即为石英玻璃转盘示踪粒子带中线的线速度,由以上方法实现石英玻璃转盘标准速度和piv测量速度的比对,进而实现通过石英玻璃转盘校准piv装置。
32、经由上述的技术方案可知,与现有技术相比,本发明公开提供了基于图像叠帧法的转盘式piv校准装置,其有益效果为:
33、(1)本发明中通过图像叠帧测量的方法,将piv测量的标准速度定为示踪粒子带中线的线速度,有效解决了石英玻璃转盘线速度与piv测量速度比对困难的技术问题;
34、(2)采用激光多点雕刻的方式模拟示踪粒子,激光器发出的片光源可从侧面打入石英玻璃转盘照亮示踪粒子,无需改变piv片激光照射的方式,方便了后续对piv设备的校准;
35、(3)石英玻璃转盘具有较高的稳定性,对piv多次测量的结果具有很好的一致性。
技术特征:
1.基于图像叠帧法的转盘式piv校准装置,其特征在于,包括:
2.根据权利要求1所述的基于图像叠帧法的转盘式piv校准装置,其特征在于,所述底座(1)的底部设有光学平台(5),所述底座(1)与光学平台(5)固定连接;所述挡板(2)的表面积大于石英玻璃转盘(4)的表面积,且所述挡板(2)遮挡整个所述石英玻璃转盘(4)。
3.根据权利要求1或2所述的基于图像叠帧法的转盘式piv校准装置,其特征在于,所述石英玻璃转盘(4)的中心位置设有夹具(6),所述夹具(6)与伺服电机(3)的输出端相连接。
4.根据权利要求1所述的基于图像叠帧法的转盘式piv校准装置,其特征在于,所述控制箱包括:箱体、触摸屏、控制器、驱动器以及编码器,所述控制器、驱动器以及编码器均设置于箱体内部,所述触摸屏设置于箱体表面;触摸屏与控制器相连接,控制器与驱动器连接,驱动器与伺服电机(3)相连接,所述编码器与伺服电机(3)相连,检测石英玻璃转盘(4)的运动速度,编码器与控制器连接,将检测的脉冲信号反馈给控制器,控制器将石英玻璃转盘(4)的速度信号传输给触摸屏。
5.根据权利要求1所述的基于图像叠帧法的转盘式piv校准装置,其特征在于,石英玻璃转盘表面粒子的生成方法如下:
6.根据权利要求5所述的基于图像叠帧法的转盘式piv校准装置,其特征在于,石英玻璃转盘表面粒子的生成方法的步骤1)中生成的粒子点的半径为60~100mm,角度值的范围为0~2π雕刻;在设置石英玻璃转盘(4)粒子个数时,在设置的最小判别区域内,应保证判别区域内的粒子点数量大于等于5。
7.根据权利要求5所述的基于图像叠帧法的转盘式piv校准装置的校准方法,其特征在于,石英玻璃转盘表面粒子的生成方法的步骤2)中雕刻处的相邻粒子之间的间距大于0.5mm。
8.如权利要求1-7任一项所述的基于图像叠帧法的转盘式piv校准装置其特征在于,piv设备的校准方法如下:
技术总结
本发明公开了基于图像叠帧法的转盘式PIV校准装置,包括:底座、挡板、伺服电机、石英玻璃转盘以及控制箱;挡板竖直固定于底座的顶部;伺服电机固定于挡板的侧面;石英玻璃转盘的表面标记有多个粒子;石英玻璃转盘和伺服电机分别位于挡板的相对两侧;伺服电机的输出端穿过挡板与石英玻璃转盘相连接;控制箱与伺服电机相连接。本发明中通过图像叠帧的测量方法,将PIV测量的标准速度定为示踪粒子带中线的线速度,有效解决了转盘线速度与PIV测量速度比对困难的技术问题。
技术研发人员:崔骊水,单杰,李春辉,高山,曹鹏,李梦娜
受保护的技术使用者:中国计量科学研究院
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!