一种基于微扫描的闪烁式激光雷达超分辨率成像系统及成像方法与流程
本发明涉及激光雷达,具体地说是一种基于微扫描的闪烁式激光雷达超分辨率成像系统及成像方法。
背景技术:
1、现有的闪烁式激光雷达技术使用了基于像素阵列的传感器进行成像,主要包括激光源、镜头、阵列传感器等模块。闪烁式激光雷达使用激光源照亮目标,并通过镜头将目标的反射光汇聚在传感器上,随后通过传感器的像素阵列测量反射光的时间延迟,最后计算目标的距离。闪烁式激光雷达不需要任何机械运动部件,因此其具有极高的抗震性能与工作可靠性。
2、对于基于距离窗口模式的闪烁式激光雷达,其中激光源的发光时间与传感器的曝光时间窗口都受到精确控制,此时传感器上所接收到的信号强度即为反射光脉冲与曝光窗口的卷积,通过计算即可得出目标反射光与激光源发光的时间差,进而得到目标距离。由于其成熟的技术以及优秀的抗干扰能力,基于距离窗口模式的闪烁式激光雷达被广泛应用于航空遥感等领域。下文的阐述均为基于距离窗口模式的闪烁式激光雷达。
3、但在现有技术中,激光雷达系统的整体分辨率(指纵、横视野划分的分辨率,而非测距的分辨率,下同)取决于传感器上物理的像素分划,若传感器的尺寸与像素密度无法进一步扩大,则最终成像的分辨率同样无法进行提升。
技术实现思路
1、本发明的目的在于提出一种基于微扫描的闪烁式激光雷达超分辨率成像系统及成像方法,以解决现有的闪烁式激光雷达技术通过具有物理像素分划的传感器进行成像,该技术的电路结构简单、生产成本低,但是其成像的分辨率完全受限于传感器上像素分划,若传感器的尺寸与像素密度无法进一步扩大,则最终成像的分辨率同样无法进行提升的问题。
2、为实现上述目的,本发明提供以下技术方案:
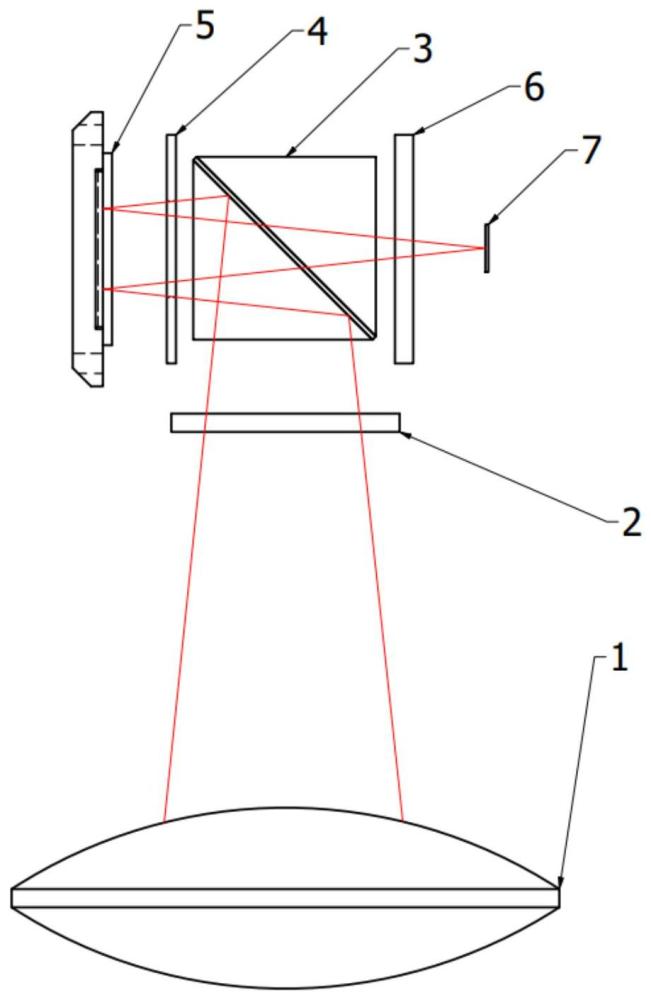
3、一种基于微扫描的闪烁式激光雷达超分辨率成像系统,包括位于中央的非偏振分束立方3,所述非偏振分束立方3的前侧设有线偏振片2与镜头组1,左侧设有光阑片1与空间光调制器件5,右侧设有滤光片6和激光雷达传感器芯片7;所有光学元件均需要确保妥善安装于避光外壳中,以保证全部光线均遵照指定的光路传播,而不会绕过任何一个光学元件。
4、所述前侧线偏振片2的偏振方向应当与所述空间光调制器件5的工作偏振方向,即光学慢轴方向一致,且与非偏振分束立方3反射面的入射平面呈平行或垂直关系。
5、所述左侧光阑片4的光阑孔大小应当与所述空间光调制器件5的有效显示区域大小一致,且安装位置尽可能贴近。
6、所述右侧滤光片6的透射波段范围应当与激光雷达的工作波长一致,所述激光雷达传感器芯片7的成像面应当位于所述镜头1的焦平面上。
7、所述空间光调制器件5为反射器件和透射器件中的一种。
8、一种基于微扫描的闪烁式激光雷达超分辨率成像方法,在所述空间光调制器件5上加载全息闪耀光栅,其中光栅的周期长度为d,光栅的高度为λ,即等同于激光的工作波长,此时得到偏转角度为θ=tan-1(λ/d);通过调整光栅周期长度d来调节偏转角度θ,从而使所述镜头1的成像位置在所述激光雷达传感器7上以0.5像素为单位进行平移,即次像素移位;通过采集4次经过了次像素移位的成像结果,分别在横向及纵向上位移(0,0)、(0,0.5)、(0.5,0)、(0.5,0.5)个物理像素,闪烁式激光雷达即可通过超分辨算法计算出2倍于所述激光雷达传感器7的物理分辨率的超分辨率成像结果。
9、与现有技术相比,本发明有益效果如下:
10、本发明能够在不改变激光雷达传感器硬件,采用次像素位移成像的方案,结合超分辨率算法,在闪烁式激光雷达上实现了超越传感器物理分辨率的超分辨率成像;使用了硅基液晶器件这一种光学相控阵方案,在不添加任何机械运动部件的前提下实现了次像素位移,保证了闪烁式激光雷达的抗震性、可靠性不受到影响。
技术特征:
1.一种基于微扫描的闪烁式激光雷达超分辨率成像系统,其特征在于,包括位于中央的非偏振分束立方(3),所述非偏振分束立方(3)的前侧设有线偏振片(2)与镜头组(1),左侧设有光阑片(1)与空间光调制器件(5),右侧设有滤光片(6)和激光雷达传感器芯片(7);所有光学元件均需要确保妥善安装于避光外壳中,以保证全部光线均遵照指定的光路传播,而不会绕过任何一个光学元件。
2.根据权利要求1所述的一种基于微扫描的闪烁式激光雷达超分辨率成像系统,其特征在于,所述前侧线偏振片(2)的偏振方向应当与所述空间光调制器件(5)的工作偏振方向,即光学慢轴方向一致,且与非偏振分束立方(3)反射面的入射平面呈平行或垂直关系。
3.根据权利要求1所述的一种基于微扫描的闪烁式激光雷达超分辨率成像系统,其特征在于,所述左侧光阑片(4)的光阑孔大小应当与所述空间光调制器件(5)的有效显示区域大小一致,且安装位置尽可能贴近。
4.根据权利要求1所述的一种基于微扫描的闪烁式激光雷达超分辨率成像系统,其特征在于,所述右侧滤光片(6)的透射波段范围应当与激光雷达的工作波长一致,所述激光雷达传感器芯片(7)的成像面应当位于所述镜头(1)的焦平面上。
5.根据权利要求1所述的一种基于微扫描的闪烁式激光雷达超分辨率成像系统,其特征在于,所述空间光调制器件(5)为反射器件和透射器件中的一种。
6.一种基于微扫描的闪烁式激光雷达超分辨率成像方法,其特征在于,在所述空间光调制器件(5)上加载全息闪耀光栅,其中光栅的周期长度为d,光栅的高度为λ,即等同于激光的工作波长,此时得到偏转角度为θ=tan-1(λ/d);通过调整光栅周期长度d来调节偏转角度θ,从而使所述镜头(1)的成像位置在所述激光雷达传感器(7)上以0.5像素为单位进行平移,即次像素移位;通过采集4次经过了次像素移位的成像结果,分别在横向及纵向上位移(0,0)、(0,0.5)、(0.5,0)、(0.5,0.5)个物理像素,闪烁式激光雷达即可通过超分辨算法计算出2倍于所述激光雷达传感器(7)的物理分辨率的超分辨率成像结果。
技术总结
本发明提供了一种基于微扫描的闪烁式激光雷达超分辨率成像系统及成像方法,在闪烁式激光雷达的镜头后方插入相位式硅基液晶器件,通过在硅基液晶器件上加载闪耀光栅来偏转镜头的成像光路,使最终的成像位置能够在传感器上以1/2像素或更小的距离为单位进行平移,即次像素位移成像;在采集多个不同位移量的成像之后,激光雷达就能够通过超分辨率算法,得到超分辨率的激光雷达距离成像结果;本发明能够在不改变激光雷达传感器硬件、不引入机械运动部件的前提下,提升闪烁式激光雷达的成像分辨率。
技术研发人员:李昆,李雪锋,杨海宁
受保护的技术使用者:剑芯光电(苏州)有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!