一种坐标转换矩阵确定方法、装置、设备及介质与流程
本技术涉及智能交通,尤其涉及一种坐标转换矩阵确定方法、装置、设备及介质。
背景技术:
1、基于雷达和视频一体机的监控技术在安防领域越来越受到重视。雷达以高检测概率获得移动目标的量测信息(空间位置和运动速度信息),但雷达无法获得较高的目标识别类率;视频/图像可获得目标高准确率的识别信息,但不易获得目标的运动信息和空间位置信息。
技术实现思路
1、本技术实施例提供了一种坐标转换矩阵确定方法、装置、设备及介质,用以实现高精度的不同坐标系之间的标定,无需人工干预,提高工作效率。
2、本技术实施例提供的一种坐标转换矩阵确定方法,包括:
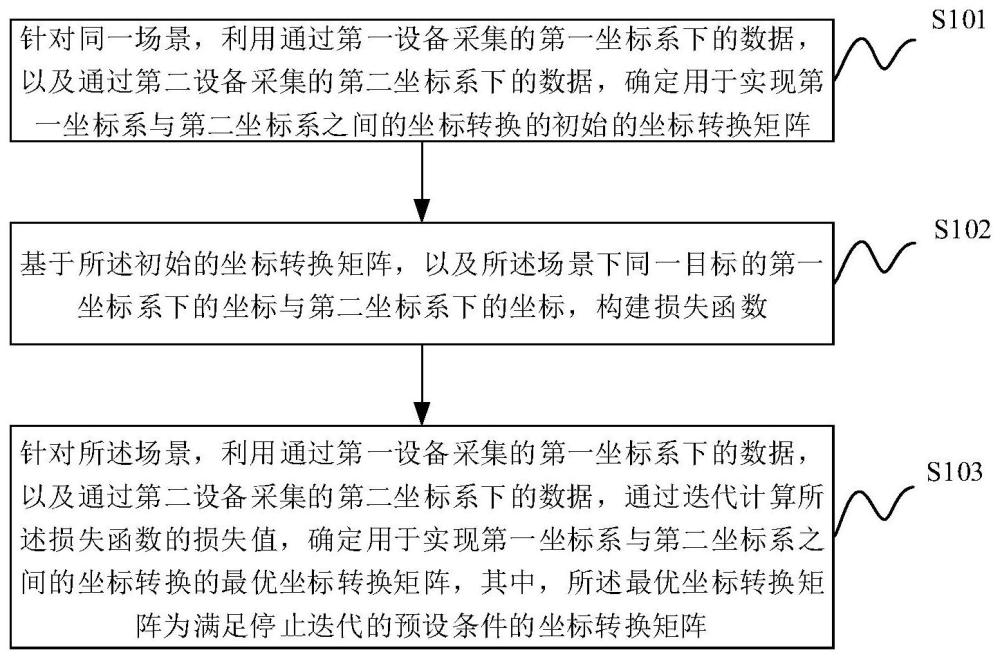
3、针对同一场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,确定用于实现第一坐标系与第二坐标系之间的坐标转换的初始的坐标转换矩阵;
4、基于所述初始的坐标转换矩阵,以及所述场景下同一目标的第一坐标系下的坐标与第二坐标系下的坐标,构建损失函数;
5、针对所述场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,通过迭代计算所述损失函数的损失值,确定用于实现第一坐标系与第二坐标系之间的坐标转换的最优坐标转换矩阵,其中,所述最优坐标转换矩阵为满足停止迭代的预设条件的坐标转换矩阵。
6、通过该方法,针对同一场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,确定用于实现第一坐标系与第二坐标系之间的坐标转换的初始的坐标转换矩阵;基于所述初始的坐标转换矩阵,以及所述场景下同一目标的第一坐标系下的坐标与第二坐标系下的坐标,构建损失函数;针对所述场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,通过迭代计算所述损失函数的损失值,确定用于实现第一坐标系与第二坐标系之间的坐标转换的最优坐标转换矩阵,其中,所述最优坐标转换矩阵为满足停止迭代的预设条件的坐标转换矩阵,从而实现了高精度的不同坐标系之间的自动标定,避免人工干预导致的误差大、效率低的等问题,进而可以将利用不同设备采集的不同坐标系下的数据有效融合,获得更高的目标识别准确率、运动信息和空间位置信息,提高了工作效率。
7、在一些实施例中,所述针对同一场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,确定用于实现第一坐标系与第二坐标系之间的坐标转换的初始的坐标转换矩阵,包括:
8、针对同一场景,获取通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据;
9、对通过所述第一设备采集的第一坐标系下的数据,和所述通过第二设备采集的第二坐标系下的数据进行时间同步,得到时间同步的第一数据和第二数据;
10、基于所述场景中的预设标志,生成第一坐标系下的第一标定区域,以及与所述第一标定区域对应的第二坐标系下的第二标定区域;
11、利用所述第一标定区域和所述第二标定区域内的时间同步的第一数据和第二数据,确定所述初始的坐标转换矩阵。
12、在一些实施例中,利用所述第一标定区域和所述第二标定区域内的时间同步的第一数据和第二数据,确定所述初始的坐标转换矩阵,包括:
13、利用所述第一标定区域和所述第二标定区域内的时间同步的第一数据和第二数据,确定所述第一标定区域的四个顶点的第一坐标系下的坐标,以及所述第二标定区域的四个顶点的第二坐标系下的坐标;
14、所述第一标定区域的四个顶点的第一坐标系下的坐标,以及所述第二标定区域的四个顶点的第二坐标系下的坐标,采用如下公式确定所述初始的坐标转换矩阵:
15、hr2v=(ata)-1atb
16、hv2r=hr2v-1
17、其中,hr2v表示用于实现将目标的第二坐标系下的坐标转换到第一坐标系下的坐标的转换矩阵;hv2r表示用于实现将目标的第一坐标系下的坐标转换到第二坐标系下的坐标的转换矩阵;并且:
18、
19、
20、其中,所述第一标定区域及其对应的所述第二标定区域为四边形区域,所述第一标定区域的四个顶点的第一坐标系下的坐标分别为(u1,v1)、(u2,v2)、(u3,v3)、(u4,v4);所述第二标定区域的四个顶点的第二坐标系下的坐标分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)。
21、在一些实施例中,基于所述初始的坐标转换矩阵,以及所述场景下同一目标的第一坐标系下的坐标与第二坐标系下的坐标,构建损失函数,包括:
22、针对所述场景下的同一目标:确定基于所述第一坐标系下的数据得到的该目标的第一坐标系下的坐标,并基于所述初始的坐标转换矩阵,将该目标的第一坐标系下的坐标转换到第二坐标系下,得到该目标的第二坐标系下的坐标;利用该目标的第二坐标系下的坐标构建概率密度函数;或者,确定基于所述第二坐标系下的数据得到的该目标的第二坐标系下的坐标,并基于所述初始的坐标转换矩阵,将该目标的第二坐标系下的坐标转换到第一坐标系下,得到该目标的第一坐标系下的坐标;利用该目标的第一坐标系下的坐标构建概率密度函数;
23、利用至少一个所述目标对应的所述概率密度函数,构建损失函数。
24、在一些实施例中,采用如下公式一,利用该目标的第二坐标系下的坐标构建概率密度函数:
25、
26、其中,f(x,y)表示利用该目标的第二坐标系下的坐标(x,y)构建的概率密度函数,σx表示x方向的方差,σy表示y方向的方差,ρ表示第二坐标系下的坐标x和y这两个变量的相关系数,μx表示x方向的均值,μy表示y方向的均值;
27、采用如下公式二,利用至少一个所述目标对应的所述概率密度函数,构建损失函数:
28、
29、其中,f(xi,yi)表示目标i对应的所述概率密度函数,n表示目标数目。
30、在一些实施例中,基于所述初始的坐标转换矩阵,以及所述场景下同一目标的第一坐标系下的坐标与第二坐标系下的坐标,构建损失函数,包括:
31、针对同一场景下的同一目标:确定基于所述第一坐标系下的数据得到的该目标的第一坐标系下的坐标,并基于所述初始的坐标转换矩阵,将该目标的第一坐标系下的坐标转换到第二坐标系下,得到该目标的第二坐标系下的坐标;确定该目标的第二坐标系下的坐标,与基于所述第二坐标系下的数据得到的该目标的第二坐标系下的坐标的欧式距离;或者,确定基于所述第二坐标系下的数据得到的该目标的第二坐标系下的坐标,并基于所述初始的坐标转换矩阵,将该目标的第二坐标系下的坐标转换到第一坐标系下,得到该目标的第一坐标系下的坐标;确定该目标的第一坐标系下的坐标,与基于所述第一坐标系下的数据得到的该目标的第一坐标系下的坐标的欧式距离;
32、利用至少一个所述目标对应的所述欧式距离,构建损失函数。
33、在一些实施例中,所述停止迭代的预设条件,包括:
34、当前计算得到的损失值,小于或等于预设的收敛阈值;
35、或者,迭代累计次数,大于或等于预设的迭代次数阈值。
36、本技术实施例提供的一种坐标转换矩阵确定装置,包括:
37、第一单元,用于针对同一场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,确定用于实现第一坐标系与第二坐标系之间的坐标转换的初始的坐标转换矩阵;
38、第二单元,用于基于所述初始的坐标转换矩阵,以及所述场景下同一目标的第一坐标系下的坐标与第二坐标系下的坐标,构建损失函数;
39、第三单元,用于针对所述场景,利用通过第一设备采集的第一坐标系下的数据,以及通过第二设备采集的第二坐标系下的数据,通过迭代计算所述损失函数的损失值,确定用于实现第一坐标系与第二坐标系之间的坐标转换的最优坐标转换矩阵,其中,所述最优坐标转换矩阵为满足停止迭代的预设条件的坐标转换矩阵。
40、本技术另一实施例提供了一种电子设备,其包括存储器和处理器,其中,所述存储器用于存储程序指令,所述处理器用于调用所述存储器中存储的程序指令,按照获得的程序执行上述任一种方法。
41、本技术另一实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使所述计算机执行上述任一种方法。
- 还没有人留言评论。精彩留言会获得点赞!