一种地面旋转状态下的滚转角测量精度评估方法与流程
本发明属于导航,具体涉及一种地面旋转状态下的滚转角测量精度评估方法。
背景技术:
1、制导弹药发射后,导航装置为其提供控制所需的姿态、速度、位置等信息,导航信息的精度制约着制导弹药的命中精度。为满足制导需求,其精度需满足指标要求。因此,导航装置在提交装配前,需对导航信息的精度进行评估验证。其中,速度和位置精度可通过地面静态轨迹测试进行评估,将速度位置导航结果与标准点对比即可获取评估结果;姿态精度则需借助转台辅助进行评估,评估结果的获取途径因导航装置的使用环境不同而存在差异。应用于倾斜稳定类弹药的导航装置,其姿态精度评估可通过操纵转台进行固定角度转位来实现,将姿态导航结果与对应的转台角位置对比即可获取评估结果。而应用于旋转类弹药的导航装置,其姿态精度评估可通过转台连续转动来实现,此时需要将导航装置输出的滚转角与转台的滚转角进行同步,将同步后的结果进行对比可获取评估结果。
2、目前用于导航装置测试的转台,部分不具备与导航装置输出同步的功能;部分虽具备同步功能,但同步精度仅1ms,不满足连续高转速环境下的测试评估要求。如何在不依赖转台同步功能的前提下,满足导航装置旋转条件下的测试评估需求,对导航装置的性能提升和评估具有重要意义。导航装置的惯性传感器由三轴陀螺仪和三轴加速度计组成,地面测试时三轴加速度计敏感值与重力大小相等方向相反,利用该特性可直接由加速度计yz轴测量值计算转台滚转角,该计算值可作为评估基准。直接利用加计测量值计算获取的转台滚转角精度,受加计测量噪声、加计零位、等效杆臂(加计测量原点与转台旋转轴间的距离)影响,等效杆臂的影响可通过事后处理进行补偿,但等效杆臂值会因产品差异而存在不同,由此带来处理上的不便。如何在利用惯性传感器估计转台滚转角的同时,削弱加计测量噪声的影响,并消除加计零位和等效杆臂的影响,对于评估精度的进一步提升具有重要的意义。
3、当前旋转类弹药的导航装置滚转角精度评估,主要通过两种方式实现:
4、方式一:利用专用同步装置,同时接收导航装置发送的滚转角结果和转台发送的滚转角数据,在收到导航装置结果后,将最近的一帧转台滚转角数据和导航装置结果合并发出实现同步。
5、方式二:利用导航装置发送的导航数据中的加速度计yz轴测量值,离线处理获取转台滚转角,该结果可直接与该包数据的导航滚转角对比。
6、方式一的主要问题是严重依赖转台发送数据的频率及转台内部处理机制,在高转速应用环境下,往往不能满足精度评估需求。例:10r/s的转速下,1ms的同步精度将带来3.6°的评估误差。
7、方式二的主要问题是受加计测量噪声、加计零位、等效杆臂(加计测量原点与转台旋转轴间的距离)影响,评估精度降级。例:加速度计yz轴敏感1g分量时,15mg的加计零位,引起约0.86°的周期性评估误差。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:如何在不依赖转台同步功能的前提下,利用惯性传感器实现转台滚转角的高精度估计,为旋转类弹药的导航装置滚转角精度评估提供基准。
3、(二)技术方案
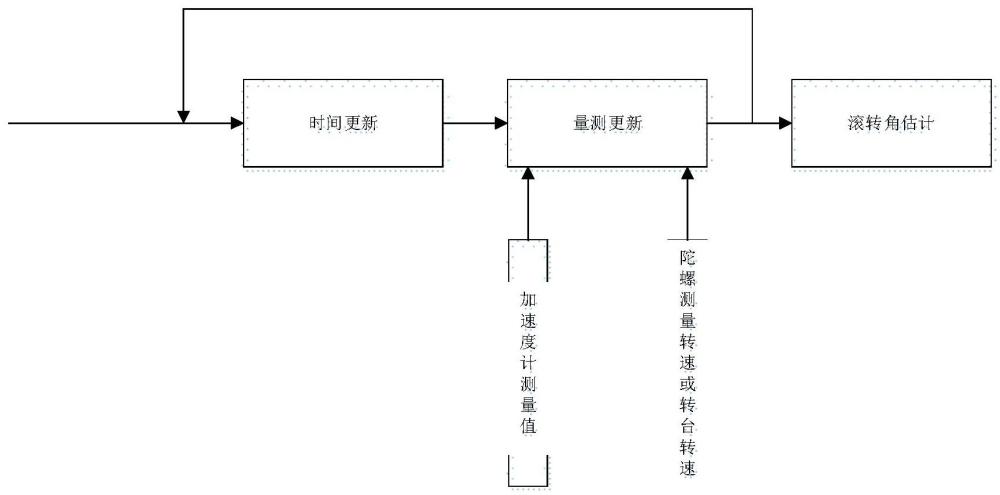
4、为了解决上述技术问题,本发明提供一种地面旋转状态下的滚转角测量精度评估方法,所述方法包括如下三个阶段:
5、阶段一:基于地面加速度计旋转测量特性,构建状态方程实现时间更新;
6、阶段二:基于选择的状态和量测,构建非线性量测方程实现量测更新;
7、阶段三:基于滤波估计结果,实现滚转角估计。
8、其中,所述阶段一为时间更新实现段:
9、解算时先进行时间更新,具体工作如下:
10、步骤11:构建可与加速度计测量信息进行融合的7维状态方程,如下:
11、
12、式中,
13、x=[sinγ0 cosγ0 kxx ry rz εy εz]t
14、sinγ0和cosγ0分别为对准开始时刻的滚转角的正弦及余弦,kxx为旋转轴向等效标度因数误差,ry和rz分别为加速度计y轴和z轴的等效杆臂,εy和εz分别为加速度计y轴和z轴的零位;
15、步骤12:计算机基于状态方程和卡尔曼滤波理论实现时间更新。
16、其中,所述阶段二为量测更新实现段;
17、在时间更新结束后,基于陀螺测量转速或者转台转速ωx计算中间变量在此基础上,结合yz轴加速度计测量值fy、fz对状态变量x进行估计,实现量测更新。
18、其中,所述阶段二具体工作如下:
19、步骤21:根据陀螺测量转速或者转台转速ωx计算中间变量该计算过程即对中间变量进行迭代递增;
20、
21、式中,的初始值取0,t为解算周期;
22、步骤22:在公式(2)的基础上,基于yz轴加速度计测量值fy和fz,对状态变量x进行估计,非线性量测方程如下:
23、
24、
25、式中,
26、
27、fx为x轴加速度计测量值;
28、步骤23:基于扩展卡尔曼滤波理论,基于公式(3)(4)进行处理实现量测更新。
29、其中,所述阶段三为滚转角估计实现段;
30、根据sinγ0、cosγ0、kxx的估计结果,结合即可计算转台滚转角γ。
31、其中,所述阶段三的计算方法如下:
32、
33、(三)有益效果
34、与现有技术相比较,本发明以制导炮弹惯性+卫星组合导航系统设计为例,本发明在测试评估组合导航滚转角精度过程中,将加计零位和等效杆臂纳入状态方程,消除了加计零位和等效杆臂的影响,同时由于采用了最优估计的手段,加计测量噪声的影响得到削弱。方法工程实现容易,可提升组合导航系统地面测试时的滚转角评估精度。所设计的方法不依赖转台同步功能,因而不增加硬件成本。
35、利用某制导炮弹组合导航系统进行了转台验证试验,针对转台测试数据进行了常规方法(加计数据直接计算滚转角)和本发明方法的对比测试,结果如图2所示。
36、常规方法与本发明方法评估结果整体基线一致,但本发明方法评估结果效果更好。
技术特征:
1.一种地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述方法包括如下三个阶段:
2.如权利要求1所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述阶段一为时间更新实现段:
3.如权利要求2所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述阶段二为量测更新实现段;
4.如权利要求3所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述阶段二具体工作如下:
5.如权利要求4所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述阶段三为滚转角估计实现段;
6.如权利要求5所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述阶段三的计算方法如下:
7.如权利要求6所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述方法属于导航技术领域。
8.如权利要求6所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述方法在不依赖转台同步功能的前提下,利用惯性传感器实现转台滚转角的高精度估计,为旋转类弹药的导航装置滚转角精度评估提供基准。
9.如权利要求6所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述方法在测试评估组合导航滚转角精度过程中,将加计零位和等效杆臂纳入状态方程,消除了加计零位和等效杆臂的影响,同时由于采用了最优估计的手段,加计测量噪声的影响得到削弱。
10.如权利要求6所述的地面旋转状态下的滚转角测量精度评估方法,其特征在于,所述方法工程实现容易,可提升组合导航系统地面测试时的滚转角评估精度,不依赖转台同步功能,因而不增加硬件成本。
技术总结
本发明属于导航技术领域,具体涉及一种地面旋转状态下的滚转角测量精度评估方法,所述方法包括如下三个阶段:阶段一:基于地面加速度计旋转测量特性,构建状态方程实现时间更新;阶段二:基于选择的状态和量测,构建非线性量测方程实现量测更新;阶段三:基于滤波估计结果,实现滚转角估计。所述方法在测试评估组合导航滚转角精度过程中,将加计零位和等效杆臂纳入状态方程,消除了加计零位和等效杆臂的影响,同时由于采用了最优估计的手段,加计测量噪声的影响得到削弱。所述方法工程实现容易,可提升组合导航系统地面测试时的滚转角评估精度,不依赖转台同步功能,因而不增加硬件成本。
技术研发人员:卢宝峰,梅春波,牛喆,杨鹏翔,朱启举,李政茂,严子木,张娇,孙博文,樊振辉
受保护的技术使用者:西安现代控制技术研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!