深远海域物体出入水实验系统、方法及图像分析方法
本技术属于物体水下动力学分析、试验及应用,具体涉及一种深远海域物体出入水实验系统、方法及图像分析方法。
背景技术:
1、近年来,人们发现海底金属矿物资源在储量和品相方面都极具吸引力,有望成为陆地矿产的替代资源。但深海各类矿物复杂的赋存条件、现有科技水准以及海洋环境的多重限制对深海开发提出了严苛的挑战。机器人作为深海采矿作业中的关键装备,决定着采矿作业是否可以正常运行,已成为了研究的重点。
2、深远海域网箱清洗机器人是一种用于海洋底部网箱清洗的机器人,对于深远海域网箱清洗机器人水动力研究主要针对波浪条件下的布放、回收水动力特性以及海底行进水动力问题,这影响到布放回收的安全性、稳定性以及海底正常工作的可靠性。就波浪海况下的布放工况而言,深远海域网箱清洗机器人的入水是一个典型的多相流问题,入水瞬间会产生剧烈的冲击,并且在撞击水面至完全浸入的过程中伴随着空泡的产生、发展、闭合以及溃灭;若考虑实际波浪载荷的作用,深远海域网箱清洗机器人的入水冲击和运动学行为将更为复杂。对于深远海域网箱清洗机器人出入水动力学研究,可以大幅提高机器人的布放回收的安全性和稳定性,为机器人的正常工作提供保障,降低机器人故障风险,因此对于机器人出入水动力学进行研究对于深海采矿产业具有重要意义。
3、当前对于深远海域网箱清洗机器人的出入水动力学研究,有较大的挑战和困难,关于其的试验系统也较为缺乏。一是由于在机器人出入水过程中,空泡的产生、发展、闭合以及溃灭现象观察较难;二是由于考虑到实际的情景,机器人出入水过程中的冲击和运动较为复杂,研究较为困难。因此,开发深远海域网箱清洗机器人出入水试验验证系统具有重要的价值和意义,可以帮助研究者更好的理解深海机器人的水动力学行为规律。
技术实现思路
1、本技术要解决的技术问题是提供一种能够提升出水实验时造浪构件生成波浪的可控性,进而更好地进行物体在深远海域的出入水动力学研究的深远海域物体出入水实验系统、方法及图像分析方法。
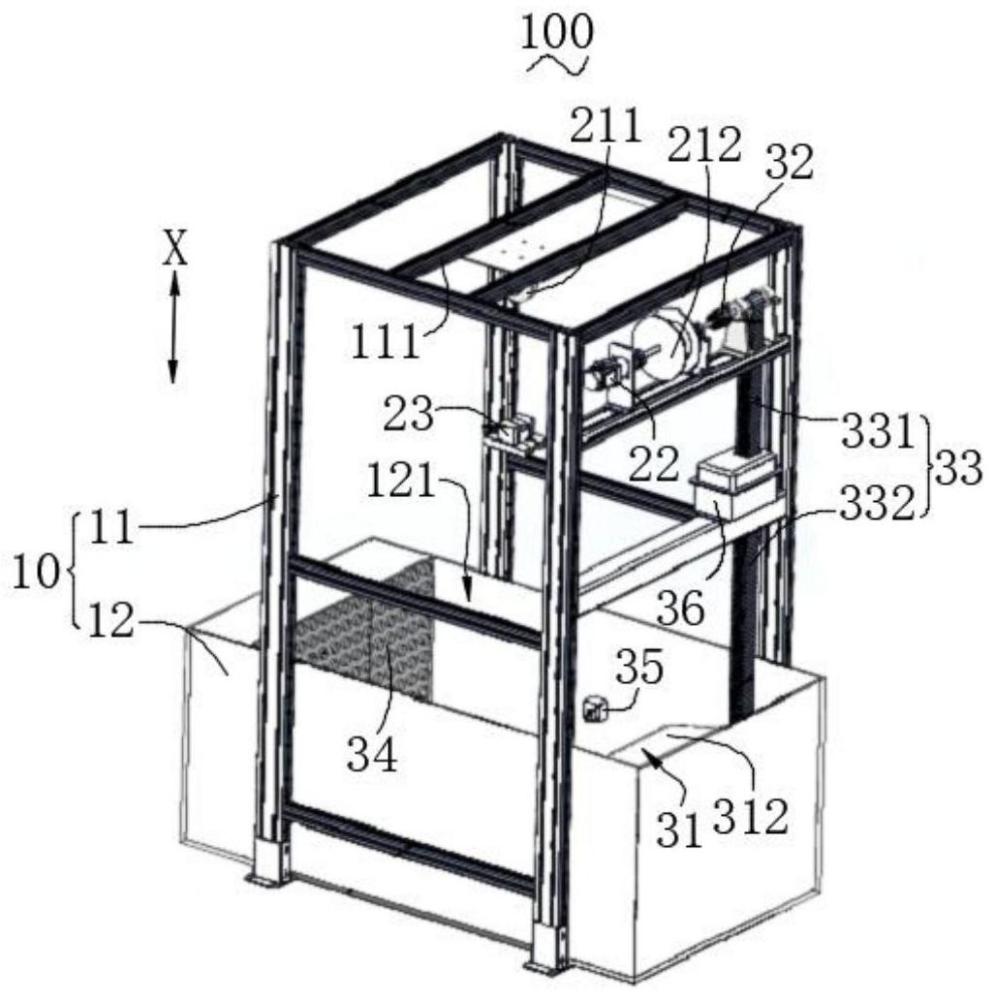
2、第一方面,本技术实施例提供了一种深远海域物体出入水实验系统,包括支架组件、实验组件、造浪组件及摄像组件,其中,支架组件包括架体及水箱,架体包括顶面,水箱与顶面沿第一方向相对设置,且水箱一端开口,水箱的开口端靠近顶面;实验组件包括升降构件、驱动构件及实验体,升降构件的至少部分设置于顶面,实验体连接于升降构件,驱动构件连接升降构件,并通过驱动升降构件,以带动实验体沿第一方向运动,使实验体经水箱的开口端进出水箱;造浪组件设置于水箱内,并包括造浪构件及离合构件,造浪构件设置于水箱内,离合构件设置在造浪构件与驱动构件之间,并用于接合或断开驱动构件;摄像组件包括镜头,镜头的光轴垂直于第一方向,并聚焦于水箱的开口端。
3、根据本技术第一方面的一个实施例,造浪构件包括旋转轴及造浪板,旋转轴沿轴向的两端分别通过两个轴承连接于水箱;造浪组件还包括传动带,传动带分别连接旋转轴及离合构件,以在离合构件与驱动构件接合时,将驱动构件的动力传输至旋转轴。
4、根据本技术第一方面的一个实施例,造浪构件还包括消波板,消波板设置在水箱的至少一个内壁。
5、根据本技术第一方面的一个实施例,造浪组件还包括传感器,传感器设置于水箱内,传感器与离合构件连接并用于向离合构件传输控制信号,以控制离合构件接合或断开驱动构件。
6、根据本技术第一方面的一个实施例,实验组件还包括保持构件,保持构件设置于顶面,并将实验体保持于顶面位置;在利用深远海域物体出入水实验系统进行入水实验时,可控制保持构件将实验体释放。
7、根据本技术第一方面的一个实施例,摄像组件还包括光源构件,光源构件包括第一光源、第二光源及柔光件,其中,第一光源靠近镜头设置于水箱的一端,并向水箱内打光;第二光源设置于水箱背离第一光源的一端,并向水箱内打光;柔光件至少设置于水箱靠近第二光源的侧壁。
8、根据本技术第一方面的一个实施例,升降构件包括第一定滑轮、第二定滑轮及线缆,其中,第一定滑轮安装于顶面;第二定滑轮安装于架体,第二定滑轮与驱动构件连接;线缆绕设于第二定滑轮,且一端经过第一定滑轮后与实验体连接。
9、第二方面,本技术实施例还提出了一种深远海域物体出入水实验方法,包括如下步骤:
10、步骤s1:开启摄像组件,以使光源构件向水箱内打光;
11、步骤s2:控制离合构件与驱动构件接合,并利用驱动构件带动造浪构件工作;
12、步骤s3:控制实验组件,以使实验体沿第一方向自由落体至水箱内,摄像组件拍摄获取实验体入水时的第一图像信息;
13、步骤s4:控制离合构件与驱动构件断开,并等待单位时间;
14、步骤s5:控制驱动构件工作,以通过升降构件将水箱内的实验体沿第一方向反向拉起;
15、步骤s6:传感器监测到实验体后,控制离合构件与驱动构件接合,驱动构件带动造浪构件工作;
16、步骤s7:摄像组件拍摄获取实验体出水时的第二图像信息;
17、步骤s8:针对采集到的第一图像信息与第二图像信息进行分析,获取实验结果。
18、第三方面,本技术实施例还提供了一种图像分析方法,用于分析第一图像信息或第二图像信息,包括如下步骤:
19、步骤s81:由于摄像组件输出的图像为rgb三维图像,为了提高图像处理的计算速度,故在本步骤中将摄像组件拍摄的第一图像信息或第二图像信息由rgb三维图像转换为二维灰度图像,转换后的灰度图像包括实验体的完整形态特征;其中,二维灰度图像f(xd,yd)的计算公式如下:
20、f(xd,yd)=0.298r+0.587g+0.144b;
21、其中,r、g、b分别代表原始图像的红色、绿色和蓝色分量,yd和xd分别是指图像的像素横纵坐标,且满足{1≤xd≤h,1≤yd≤wx,y∈i},h和w分别为图像行和列的像素值,i为自然数集;
22、步骤s82:获取背景噪声较小的灰度值差值矩阵;灰度值差值矩阵dsub(xd,yd)的计算公式如下:
23、dsub(xd,yd)=b(xd,yd)-y(xd,yd);
24、其中,y(xd,yd)为经过前述步骤s81处理后的原始图像矩阵,b(xd,yd)为背景图像的灰度值矩阵
25、步骤s83:抑制灰度值差值矩阵中较小的值并放大较大的值,以获取灰度值差值矩阵的增强矩阵;其中,增强矩阵denh(xd,yd)的计算公式如下:
26、
27、其中,pe和qe为常数;
28、步骤s84:根据增强矩阵计算获得二值矩阵;其具体为先定义截断阀值fν,根据截断阀值fν和增强矩阵denh(xd,yd)计算获得二值矩阵,二值矩阵dbin(xd,yd)的计算公式如下:
29、
30、其中,二值矩阵的值等于1的像素点包含了空泡形态和实验体位置信息;
31、步骤s85:获得完全去除背景且保留完整空泡形态和实验体轮廓的新图像灰度矩阵,其中,新图像灰度矩阵yera(xd,yd)的计算公式如下:
32、yera(xd,yd)=y(xd,yd)·dbin(xd,yd)+255[1-dbin(xd,yd)];
33、同时,定义图像背景线性调制函数ib(xd,yd)如下:
34、ib(xd,yd)=(sb-eb)b(xd,yd)+eb;
35、其中,sb=0.94为灰度值抑制系数,eb=0.7为灰度增强系数;
36、步骤s86:获得空泡形态和实验体轮廓清洗且无背景噪声干扰的图像ip,计算公式如下:
37、ip=y(xd,yd)·dbin(xd,yd)+[1-dbin(xd,yd)]·ib(xd,yd)。
38、根据本技术第二方面的一个实施例,获得空泡形态和实验体轮廓清洗且无背景噪声干扰的图像后还包括步骤s87边缘检测及步骤s88修正折射影响,其中,
39、步骤s87边缘检测包括如下步骤:
40、步骤s871:采用图像旋转技术对原始图像进行处理,根据实验体的底面和侧面分割出包含有实验体的局部图像;
41、步骤s872:基于二阶插值方法对分割后的图像进行k阶插值;
42、步骤s873:根据实验体底面边缘中心点的坐标,计算出检测边缘点在插值图像中的分布,计算公式如下:
43、
44、其中,ndet为机器人边缘上的检测点数,linp为插值图像中机器人边缘长度的估计值;linp的计算公式如下:
45、
46、步骤s88修正折射影响包括如下步骤:
47、假设实验体入水后做平面三维运动,采用如下公式修正受折射影响的实验体中心位置坐标:
48、
49、其中,lc为相机高速摄像机镜头至水箱壁面的距离,lt为机器人轴线到水箱壁面的距离,smeasure为检测点的坐标到相机镜头中心位置的距离,sreal为检测坐标点的实际像素距离,n为水的折射率。
50、本技术的有益效果是,通过设置造浪组件包括造浪构件及离合构件,离合构件设置在造浪构件与驱动构件之间,并用于接合或断开驱动构件,以可以将造浪构件的运动与升降构件的运动相联系,在进行入水实验时,可以首先通过离合构件与驱动构件接合的方式,将造浪构件的运动与驱动构件的运动相联系;在进行出水实验时,可以将造浪构件的运动与驱动构件通过升降构件带动实验体升降的运动相联系,实现在进行出水实验时才造浪的目的,一方面可以减少造浪构件在非实验阶段进行造浪的能源浪费,另一方面可以减少水波在水箱内形成叠加,破坏水波的完整波形,提升实验的准确性与可靠性。
- 还没有人留言评论。精彩留言会获得点赞!