一种激光测距方法及装置
本发明涉及测距,尤其涉及一种激光测距方法及装置。
背景技术:
1、目前,自动驾驶技术已被广泛应用于无人引导车、自动驾驶汽车、无人机等智能移动设备中,促进了物流运输和工业生产等行业的快速发展,产生了巨大的社会价值与经济价值。
2、激光雷达测距系统是自动驾驶领域中障碍物探测的主要工具,正朝着高精度、大量程、低成本、小型化以及人眼安全的方向快速发展。而由于激光测距具有探测范围大、测量速度快、抗干扰能力强以及非接触式测量的优势,被应用在激光雷达测距系统中,目前市场上智能机器人、自动驾驶汽车等产品已经大量出现,对激光测距技术有着巨大的市场需求。
3、现有的激光测距方法大多通过直接测量激光发射、打到探测物体再返回到探测器的飞行时间,来反推激光测距传感器到被测物的距离,但该过程容易受到环境中的光照、反射等因素的影响,且在测量近距离或远距离时存在一定的限制,导致测距结果的精度较低。
技术实现思路
1、本发明提供了一种激光测距方法及装置,用于解决现有的激光测距方法受到环境中的光照、反射等因素的影响,导致测距结果的精度较低的技术问题。
2、本发明第一方面提供的一种激光测距方法,包括:
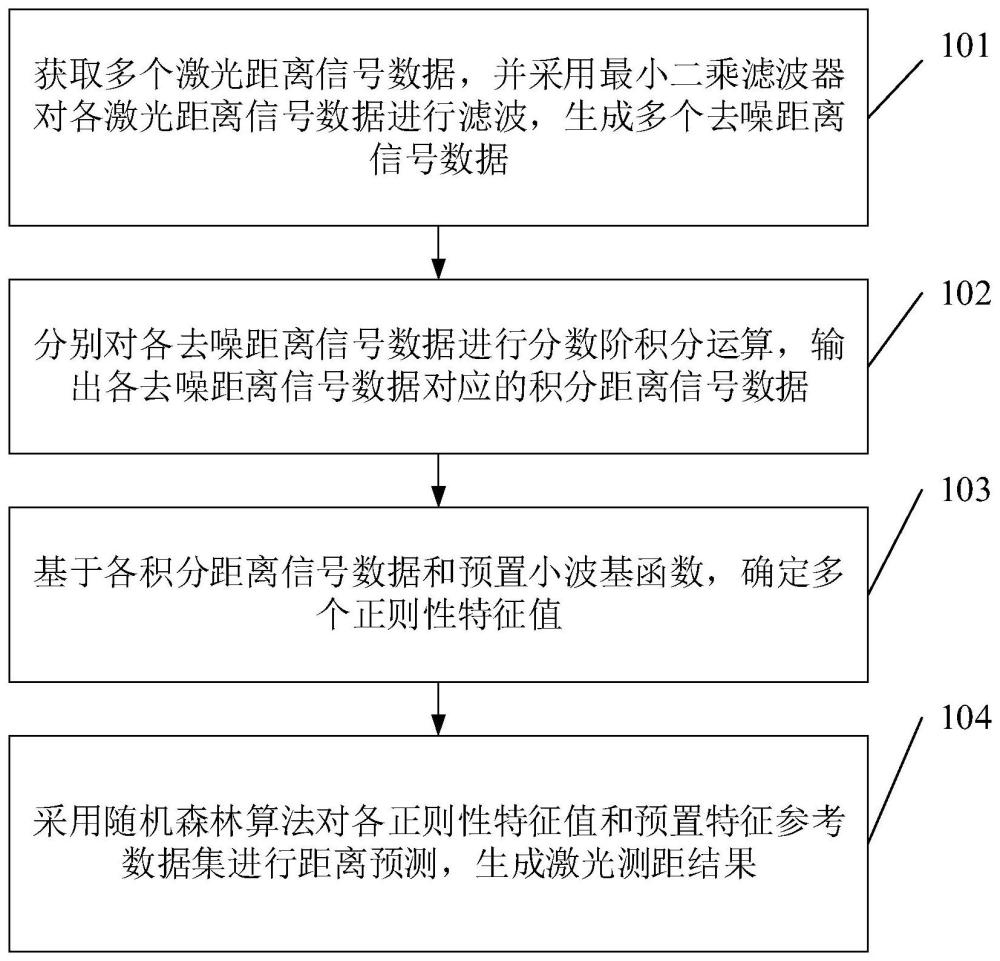
3、获取多个激光距离信号数据,并采用最小二乘滤波器对各所述激光距离信号数据进行滤波,生成多个去噪距离信号数据;
4、分别对各所述去噪距离信号数据进行分数阶积分运算,输出各所述去噪距离信号数据对应的积分距离信号数据;
5、基于各所述积分距离信号数据和预置小波基函数,确定多个正则性特征值;
6、采用随机森林算法对各所述正则性特征值和预置特征参考数据集进行距离预测,生成激光测距结果。
7、可选地,所述积分距离信号数据的运算过程,具体为:
8、
9、其中,为分数微积分算子;f(t)*为积分距离信号数据;h为时间步长;v为分数阶导数的阶数;t为积分变量;a为积分的初始时间;k为迭代次数;f(·)为去噪距离信号数据。
10、可选地,所述基于各所述积分距离信号数据和预置小波基函数,确定多个正则性特征值的步骤,包括:
11、采用预置小波基函数对各所述积分距离信号数据进行小波变换,输出多个卷积距离信号数据;
12、基于各所述卷积距离信号数据,确定各所述卷积距离信号数据对应的多个模极大值;
13、将各所述模极大值分别代入预置第一公式,计算各所述模极大值对应的正则性特征值。
14、可选地,所述卷积距离信号数据的处理过程,具体为:
15、
16、其中,wf(s,τ)为卷积距离信号数据;f(t)*为积分距离信号数据;ψsτ(t)为预置小波基函数;s为母小波尺度;t为积分变量;τ为小波平移变量;ψ(·)为母小波。
17、可选地,所述采用随机森林算法对各所述正则性特征值和预置特征参考数据集进行距离预测,生成激光测距结果的步骤,包括:
18、采用各所述正则性特征值和预置特征参考数据集,构建矩阵数据集;
19、按照预置比例对所述矩阵数据集进行划分,生成矩阵数据训练集、矩阵数据验证集和矩阵数据测试集;
20、按照所述矩阵数据训练集的矩阵列序号,对所述矩阵数据训练集分别执行单矩阵列剔除操作,输出多个目标矩阵数据训练集;
21、采用各所述目标矩阵数据训练集分别对随机森林算法模型进行模型训练,输出各所述目标矩阵数据训练集对应的第一目标随机森林算法模型;
22、将所述矩阵数据验证集分别输入至各所述第一目标随机森林算法模型进行预测,输出多个第一初始距离预测值;
23、采用所述矩阵数据训练集对所述随机森林算法模型进行模型训练,输出所述矩阵数据训练集对应的第二目标随机森林算法模型;
24、基于所述第二目标随机森林算法模型、所述矩阵数据测试集、所述预置特征参考数据集和各所述第一初始距离预测值,确定激光测距结果。
25、可选地,所述基于所述第二目标随机森林算法模型、所述矩阵数据测试集、所述预置特征参考数据集和各所述第一初始距离预测值,确定激光测距结果的步骤,包括:
26、将所述矩阵数据测试集输入至所述第二目标随机森林算法模型进行预测,输出第二初始距离预测值;
27、采用所述预置特征参考数据集和各所述第一初始距离预测值,计算线性规划最小值;
28、采用所述线性规划最小值和所述第二初始距离预测值进行乘积运算,输出激光测距结果。
29、本发明第二方面提供的一种激光测距装置,包括:
30、获取模块,用于获取多个激光距离信号数据,并采用最小二乘滤波器对各所述激光距离信号数据进行滤波,生成多个去噪距离信号数据;
31、运算模块,用于分别对各所述去噪距离信号数据进行分数阶积分运算,输出各所述去噪距离信号数据对应的积分距离信号数据;
32、确定模块,用于基于各所述积分距离信号数据和预置小波基函数,确定多个正则性特征值;
33、采用模块,用于采用随机森林算法对各所述正则性特征值和预置特征参考数据集进行距离预测,生成激光测距结果。
34、可选地,所述积分距离信号数据的运算过程,具体为:
35、
36、其中,为分数微积分算子;f(t)*为积分距离信号数据;h为时间步长;v为分数阶导数的阶数;t为积分变量;a为积分的初始时间;k为迭代次数;f(·)为去噪距离信号数据。
37、可选地,所述确定模块,包括:
38、输出子模块,用于采用预置小波基函数对各所述积分距离信号数据进行小波变换,输出多个卷积距离信号数据;
39、卷积子模块,用于基于各所述卷积距离信号数据,确定各所述卷积距离信号数据对应的多个模极大值;
40、计算子模块,用于将各所述模极大值分别代入预置第一公式,计算各所述模极大值对应的正则性特征值。
41、可选地,所述卷积距离信号数据的处理过程,具体为:
42、
43、其中,wf(s,τ)为卷积距离信号数据;f(t)*为积分距离信号数据;ψsτ(t)为预置小波基函数;s为母小波尺度;t为积分变量;τ为小波平移变量;ψ(·)为母小波。
44、从以上技术方案可以看出,本发明具有以下优点:
45、本发明的上述技术方案提供了一种激光测距方法,首先获取多个激光距离信号数据,并采用最小二乘滤波器对各激光距离信号数据进行滤波,生成多个去噪距离信号数据;接着,分别对各去噪距离信号数据进行分数阶积分运算,输出各去噪距离信号数据对应的积分距离信号数据;基于各积分距离信号数据和预置小波基函数,确定多个正则性特征值;最后,采用随机森林算法对各正则性特征值和预置特征参考数据集进行距离预测,生成激光测距结果;上述方案,通过对各去噪距离信号数据进行分数阶积分运算,并计算经过分数阶积分得到的各个积分距离信号数据的多个正则性特征值,最后,结合随机森林算法对各正则性特征值和预置特征参考数据集进行距离预测的过程,相较于现有的通过直接测量激光发射、打到探测物体再返回到探测器的飞行时间,来反推激光测距传感器到被测物的距离的过程,减少了环境总的光照、反射等因素的影响,能够提升测距结果的精度。
- 还没有人留言评论。精彩留言会获得点赞!