低密度冠层环境自主导航方法及装置
本申请涉及地图导航,尤其涉及一种低密度冠层环境自主导航方法和装置。
背景技术:
1、在室内即时定位与地图构建(simultaneous localization and mapping,slam)领域,以单线激光雷达为主的室内激光slam已广泛应用于家政清洁、餐饮、仓储等领域,并展现出极好的性能。然而,在设施农业领域,作物冠层稀疏、作业空间狭窄、路况复杂等因素,对采摘、植保等温室作业机器人的定位精度提出更高要求。
2、精确的温室环境地图构建有利于提高自主作业机器人的定位精度与导航效果。根据传感器的类型,slam技术可以分为视觉slam和激光slam。由于视觉传感器易受光线影响导致建图质量较差;激光slam不受光线影响,可为采摘、植保等作业任务实现全天候作业。对于温室低密度冠层的作物环境,传统的激光slam由于地图退化导致轮廓信息丢失,难以实现精确且完整的环境地图构建,无法满足农业机器人作业对地图构建与定位精度的需求。
技术实现思路
1、本申请提供一种低密度冠层环境自主导航方法及装置,用以解决现有技术中地图构建与定位精度低的缺陷。
2、第一方面,本申请实施例提供一种低密度冠层环境自主导航方法,包括:
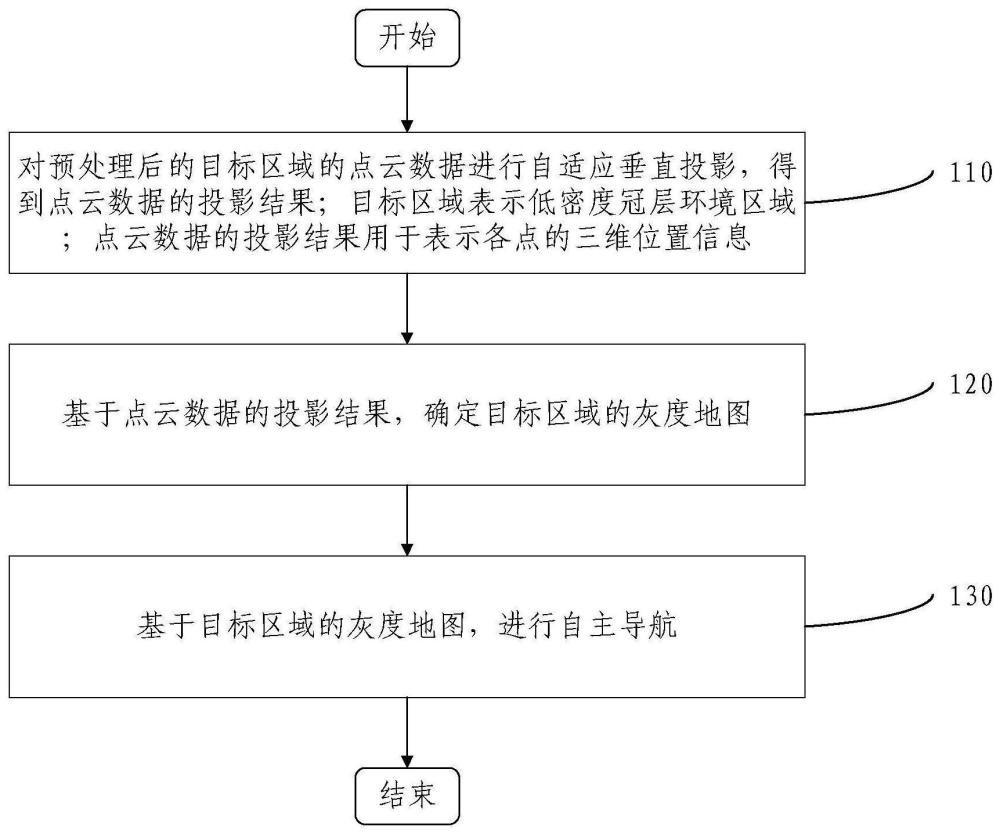
3、对预处理后的目标区域的点云数据进行自适应垂直投影,得到点云数据的投影结果;所述目标区域表示低密度冠层环境区域;所述点云数据的投影结果用于表示各点的三维位置信息;
4、基于所述点云数据的投影结果,确定目标区域的灰度地图;
5、基于所述目标区域的灰度地图,进行自主导航。
6、在一个实施例中,对预处理后的目标区域的点云数据进行自适应垂直投影,得到点云数据的投影结果,包括:
7、对预处理后的目标区域的点云数据进行自适应垂直投影,得到目标区域的点云投影;
8、基于目标区域的点云投影中各点在极坐标下对应的欧氏距离,确定所述点云数据的投影结果;所述点云数据的投影结果表示欧氏距离最小的点云数据。
9、在一个实施例中,基于所述点云数据的投影结果,确定目标区域的灰度地图,包括:
10、基于里程计数据,对所述点云数据的投影结果进行线性插值处理,得到统一坐标系的点云数据;
11、基于所述统一坐标系的点云数据,确定目标区域的灰度地图。
12、在一个实施例中,基于所述目标区域的灰度地图,进行自主导航,包括:
13、基于所述目标区域的灰度地图和虚拟作物层,确定代价地图;所述虚拟作物层用于表示植株冠层小于预设分辨率的作物;
14、基于所述代价地图,进行自主导航。
15、在一个实施例中,所述方法还包括:
16、对所述目标区域的灰度地图进行二值化处理,得到二值图像;
17、使用掩膜算子遍历所述二值图像,确定第一行端坐标;并使用聚类算法对所述二值图像进行聚类,确定第二行端坐标;
18、基于所述第一行端坐标与所述第二行端坐标的匹配结果,确定所述虚拟作物层。
19、在一个实施例中,基于所述目标区域的灰度地图和虚拟作物层,确定代价地图,包括:
20、将所述目标区域的灰度地图进行二值化处理,得到静态地图层;并基于探测到的所述目标区域的障碍物信息,确定障碍物地图层;
21、将所述静态地图层进行膨胀操作,得到第一膨胀地图层;并将所述障碍物地图层进行膨胀操作,得到第二膨胀地图层;
22、基于所述第一膨胀地图层、所述第二膨胀地图层和所述虚拟作物层,确定所述代价地图。
23、在一个实施例中,所述方法还包括:
24、获取目标区域的点云数据;
25、对所述目标区域的点云数据进行滤波处理,得到预处理后的目标区域的点云数据。
26、第二方面,本申请实施例提供一种低密度冠层环境自主导航装置,包括:
27、投影模块,用于对预处理后的目标区域的点云数据进行自适应垂直投影,得到点云数据的投影结果;所述目标区域表示低密度冠层环境区域;所述点云数据的投影结果用于表示各点的三维位置信息;
28、确定模块,用于基于所述点云数据的投影结果,确定目标区域的灰度地图;
29、导航模块,用于基于所述目标区域的灰度地图,进行自主导航。
30、第三方面,本申请还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法。
31、第四方面,本申请还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面所述的方法。
32、本申请实施例提供的低密度冠层环境自主导航方法及装置,通过对点云数据进行垂直投影,确定灰度地图,基于灰度地图可以进行自主导航。与单纯的平面激光雷达提供的点云数据相比,垂直投影后的激光雷达点云数据,在定位中具有更为丰富的环境特征信息,可以大大提升定位的准确性。本申请提供的方法还可以解决温室低密度冠层环境下激光slam的地图退化问题,实现温室低密度冠层环境下的地图构建和高精度位姿估计,保证自主导航效果。本申请提供的方法还具有结构简洁、制造成本低、算法鲁棒性强的特点,从而对温室作物日常管理与采摘、植保等作业的机械化、智能化发展具有重要意义。
技术特征:
1.一种低密度冠层环境自主导航方法,其特征在于,包括:
2.根据权利要求1所述的低密度冠层环境自主导航方法,其特征在于,对预处理后的目标区域的点云数据进行自适应垂直投影,得到点云数据的投影结果,包括:
3.根据权利要求1所述的低密度冠层环境自主导航方法,其特征在于,基于所述点云数据的投影结果,确定目标区域的灰度地图,包括:
4.根据权利要求1所述的低密度冠层环境自主导航方法,其特征在于,基于所述目标区域的灰度地图,进行自主导航,包括:
5.根据权利要求4所述的低密度冠层环境自主导航方法,其特征在于,所述方法还包括:
6.根据权利要求4所述的低密度冠层环境自主导航方法,其特征在于,基于所述目标区域的灰度地图和虚拟作物层,确定代价地图,包括:
7.根据权利要求1所述的低密度冠层环境自主导航方法,其特征在于,所述方法还包括:
8.一种低密度冠层环境自主导航装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述低密度冠层环境自主导航方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述低密度冠层环境自主导航方法。
技术总结
本申请提供一种低密度冠层环境自主导航方法及装置,涉及地图导航技术领域。所述方法包括:对预处理后的目标区域的点云数据进行自适应垂直投影,得到点云数据的投影结果;所述目标区域表示低密度冠层环境区域;所述点云数据的投影结果用于表示各点的三维位置信息;基于所述点云数据的投影结果,确定目标区域的灰度地图;基于所述目标区域的灰度地图,进行自主导航。本申请提供的低密度冠层环境自主导航方法及装置,可以实现高精度地图构建、定位及导航。
技术研发人员:翟长远,谭昊然,赵学观,陈立平,李思,宋健
受保护的技术使用者:北京市农林科学院智能装备技术研究中心
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!