一种自抗扰航向控制的无人船水质监测系统
本发明涉及无人船水质监测领域,具体涉及一种自抗扰航向控制的无人船水质监测系统。
背景技术:
1、随着水资源的污染程度不断地加重,水污染的治理已是迫在眉睫,而水体质量的监测是治理水污染,保护水环境的重要举措之一。判断水体是否被污染,首先需要采集水体样本,通过一些监测手段,获取水体中物理水质参数和化学水质参数,根据这些参数来判断水体是否被污染,其中物理水质参数包括温度、色度、ph值、电导率等等;化学水质参数包括氨氮化合物、氰、植物营养物、无机非金属化合物等等。根据这些指标,我们需要建立一个持续稳定的监测手段,以达到对水体质量的检测,以便后续水污染的治理。
2、目前,水质监测的主要方式是通过在被监测水域中建立监测点来完成。然而,这种方式存在一些限制,首先,由于监测点位置固定且监测范围受限,无法覆盖整个水域范围,为了实现全面覆盖,需要安装大量的监测点,这会增加了项目成本和安装困难。对于没有固定监测点的水域,需要现场工作人员采样或使用移动水质监测平台进行采样,针对较大范围的水质监测,采样工作量增加,这无疑增加了人力和物力的投入。另一方面,为了及时掌握水质信息,需要保证数据的实时性,但是人工监测的方法往往周期较长,导致数据缺乏实时性。因此,当前的水质监测方式存在以上这些挑战和问题。
3、如今随着5g技术,物联网,导航控制等技术的发展以及“互联网+”的快速应用,同时,为了解决当前水质监测方法的弊端,有人设计了一种基于物联网的水质监测无人船系统,但是由于航行环境存在时变的海浪干扰,波浪引起的附加摇摆运动会使艏向操纵控制器频繁的操舵,长时间会减少舵机寿命、缩短无人艇续航能力以及降低整体航行控制效率,存在无人船抗干扰能力弱,鲁棒性差的缺点。
技术实现思路
1、本发明的目的在于提供一种基于自抗扰航向控制的无人船水质监测系统,提高无人船航行的稳定性和抗干扰性,增加安全性,同时用户可以在地面站系统设置无人船目标点,方便用户更加全面了解水域的水质情况,使水质监测更加方便快捷;
2、实现本发明目的的技术解决方案为:
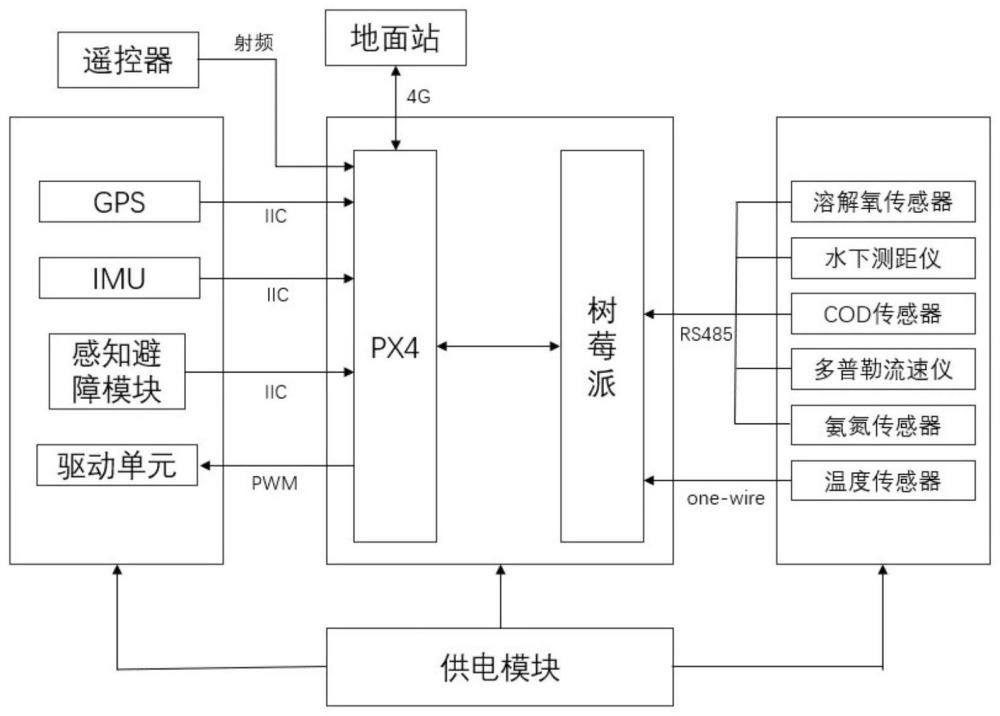
3、一种自抗扰航向控制的无人船水质监测系统,包括外部装置、无人船装置、水质检测装置和电源模块,其中:
4、所述外部装置包括地面站和通信模块,地面站用于设置目标路径以及控制命令和结果显示,地面站通过通信模块与无人船装置通信;
5、所述无人船装置包括无人船主控模块、传感器模块和驱动模块;所述无人船主控模块安装于船体轴中心,用于船体自抗扰航向控制、传感器数据滤波定位、位姿控制、异常处理和故障定位;所述传感器包括gps传感器和imu传感器,用于定位;所述驱动模块用于给无人船提供动力,使其按照给定路径完成航行;
6、所述水质检测装置包括水质检测主控模块、水质传感器采集模块;所述水质传感器采集模块负责采集水质信息,水质检测主控模块用于读取水质传感器采集模块采集的数据,对采集的数据滤波,将采集数据发送至无人船主控模块;
7、所述电源模块用于为无人船装置、水质检测装置供电。
8、进一步地,所述无人船主控模块以嵌入式控制板为核心,采用pixhawk4控制板,通过i2c协议接收传感器模块数据。
9、进一步地,所述水质检测主控模块采用树莓派3b,水质传感器采集模块包括溶解氧传感器、水下测距仪、cod传感器、氨氮传感器、多普勒流速仪和温度传感器,水质传感器采集模块和树莓派3b之间采用rs485通讯;pixhawk4和树莓派3b之间采用串口通讯。
10、进一步地,所述通讯模块由无线通信电路实现,通过串口通讯方式与无人船主控模块连接。
11、进一步地,所述船体自抗扰航向控制根据无人船当前位姿信息,采用自抗扰控制算法,稳定航向控制以及路径上水质信息的采集,采用自抗扰控制算法具体为:
12、步骤一,考虑无人船艇的惯性、舵角和推进力之间的关系,以及外部环境对船艇的扰动影响,采用二阶非线性norrbin模型建立无人船艇动力学模型;
13、步骤二,基于跟踪微分器接受的设定航向角计算出下一时刻的近似航向角及该近似航向角的一阶微分信号;
14、步骤三,基于扩张状态观测器接收的实际的航向角信息和船艇的输入控制量,计算出下一时刻无人船实际航向的估计值及其一阶微分的估计值,同时计算总扰动的估计值;
15、步骤四,基于计算出的近似航向角、该近似航向角的一阶微分信号、无人船艇实际航向的估计值及其一阶微分的估计值,计算出控制分量;
16、步骤五,基于无人船艇动力学模型和控制分量,并利用总扰动的估计值对控制分量进行扰动补偿,得到无人船艇的控制量。
17、进一步地,所述无人船艇动力学模型为:
18、
19、其中t0、k0由无人船的基础参数决定,ψ和δ分别代表航向角和舵角,α为非线性系数。
20、进一步地,所述近似航向角及该近似航向角的一阶微分信号为:
21、
22、其中,x1(k)是输入信号,v(k)是k时刻的输入信号,x2(k)是跟踪v(k)的微分信号,r为速度因子,反应跟踪速度快慢,h为积分步长,h0为滤波因子,fhan是最速控制综合函数,具体为:
23、d=rh
24、d0=hd
25、y=x1+hx2
26、
27、
28、
29、其中,d、d0、y、a、a0为中间变量。
30、进一步地,所述无人船实际航向的估计值及其一阶微分的估计值,以及总扰动的估计值具体为:
31、
32、其中z1、z2为对实际的航向以及相对应微分的观测值,z3为对总扰动的观测值,β01,β02,β03,δ,b为参数,h为步长,fal(e,α,δ)为原点附近具有线性段的连续幂次函数,为:
33、
34、其中,α是与变量阶数相关的参数,e为误差,其值为e=z1-y。
35、进一步地,所述步骤四中控制分量为:
36、u0=β1·fal(x1(k)-z1(k),α1,δ)+β2·fal(x2(k)-z2(k),α2,δ)
37、其中,β1、β2、α1、α2和δ是可变参数,且0<α1<1<α2<2;
38、步骤五中无人船艇的控制量为:
39、
40、b为决定补偿强弱的补偿因子。
41、进一步地,所述pixhawk4通过r9ds接收机与无人船的遥控器进行射频连接,用于用户手动遥控操作无人船。
42、与现有技术相比,本发明的有效增益为:
43、本发明所设计的自主导航无人船水质监测系统适用于湖泊等水域的水质监测,用无线通信模块实现水质数据上传至用户端实现水质数据可视化,相对于传统的检测调控,本发明降低了时空的局限性,用户可以在地面站系统设置无人船目标点,方便用户更加全面了解水域的水质情况,使检测更加方便。同时采用的无模型的自抗扰控制算法,与传统的pid控制算法相比,此方法保障无人船运行的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!