一种面向磁探测无人机卫通天线磁干扰的补偿方法及系统
本发明涉及航空遥感/磁探,具体涉及一种面向磁探测无人机卫通天线磁干扰的补偿方法及系统。
背景技术:
1、面向航空平台的磁干扰补偿技术是对搭载了磁探测设备、用于航空磁探测作业任务的航空平台(包括有人机、无人机等)引起的磁场干扰进行补偿的一种技术,目的是提高磁探测数据的精度,降低干扰磁场对数据质量的影响。通过分析无人机平台上可能产生磁场干扰的设备,针对不同类型的磁场干扰建立相应的数学模型,然后对模型中的参数进行求解,使用参数化模型对磁场干扰进行计算和补偿,从而尽可能降低磁探测无人机在作业过程中受到的平台磁场干扰。基于平台磁场干扰的来源和作用形式,t-l模型用来描述和补偿来自飞机机体、与飞机姿态有关的干扰磁场,obe模型则用来描述飞机上用电设备工作时与设备工况有关的干扰磁场。而中大型无人机上一般都会装备的卫通机构则是一类特殊的磁场干扰来源,由于卫星通信系统的天线需要始终保持指向特定的卫星,因此往往需要一套支持三轴旋转的伺服机构实时调整天线的姿态,这套机构由电机驱动,且机构零件本身也有一定的磁性,因此在工作状态下表现出一种电流干扰和磁性部件运动二者结合的磁场干扰模式。这种干扰在典型的磁探测无人机系统的典型工况下,是比较显著的,因此,为了进一步提升无人机航空磁探测系统的测量精度和数据质量,必须对平台上卫通机构引起的干扰磁场进行实时补偿。
技术实现思路
1、鉴于以上问题,本发明提出一种面向磁探测无人机卫通天线磁干扰的补偿方法及系统。
2、根据本发明的一方面,提出一种面向磁探测无人机卫通天线磁干扰的补偿方法,该方法包括以下步骤:
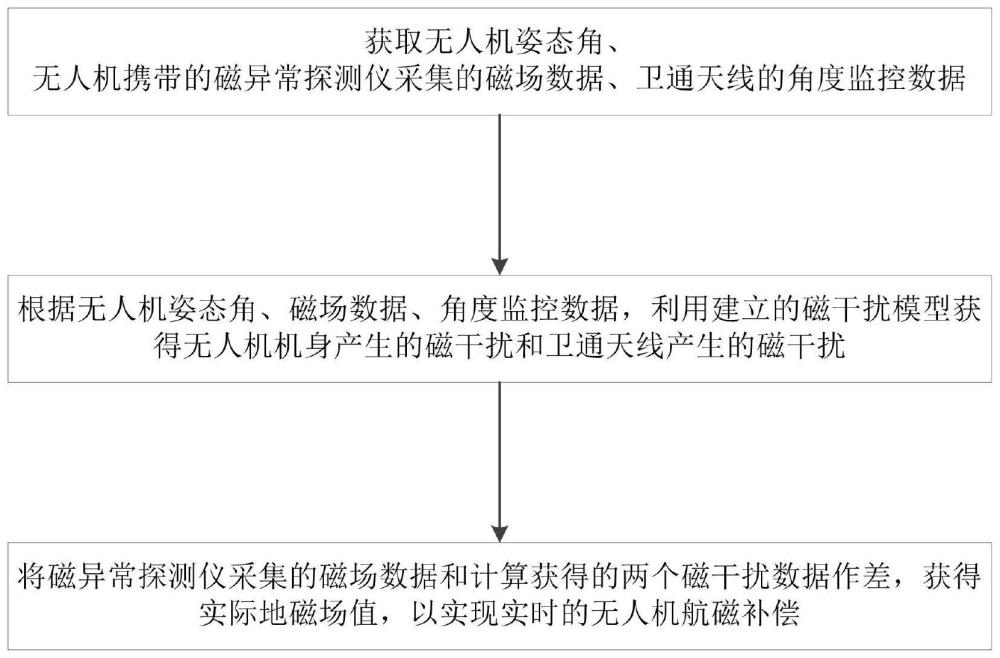
3、获取无人机姿态角;获取无人机携带的磁异常探测仪采集的磁场数据、卫通天线的角度监控数据;
4、根据所述无人机姿态角、磁场数据、卫通天线的角度监控数据,利用建立的磁干扰模型获得无人机机身产生的磁干扰和卫通天线产生的磁干扰;
5、将所述磁异常探测仪采集的磁场数据和计算获得的两个磁干扰数据作差,获得实际地磁场值,以实现实时的无人机航磁补偿。
6、进一步地,所述卫通天线的角度监控数据包括航向角、俯仰角和极化角。
7、进一步地,所述建立的磁干扰模型包括通过t-l模型构建的机体磁干扰模型和根据卫通天线的运动角度构建的卫通天线磁干扰模型;其中,通过t-l模型构建机体磁干扰模型的过程包括:根据所述无人机姿态角计算获得磁力仪坐标系三轴与地磁场之间夹角的余弦值;根据所述余弦值计算获得机体磁干扰模型矩阵;将所述机体磁干扰模型矩阵和已知的系数矩阵相乘获得机体磁干扰模型。
8、进一步地,所述根据卫通天线的运动角度构建卫通天线磁干扰模型的过程包括:卫通天线磁干扰包括方位机构运动产生的磁干扰hm1、天线主面运动产生的磁干扰hm2和馈源部分运动产生的磁干扰hm3;根据所述无人机姿态角和所述卫通天线的角度监控数据分别计算方位机构运动对应的姿态角αm1,βm1,γm1、天线主面运动对应的姿态角αm2,βm2,γm2、馈源部分运动对应的姿态角αm3,βm3,γm3;根据方位机构运动、天线主面运动、馈源部分运动各自对应的姿态角分别计算获得三组磁力仪坐标系三轴与地磁场之间夹角的余弦值;根据所述余弦值分别计算获得卫通天线磁干扰模型矩阵;将所述卫通天线磁干扰模型矩阵和已知的系数矩阵相乘获得卫通天线磁干扰模型。
9、进一步地,所述已知的系数矩阵按照下述方式获得:预先利用地磁背景数据库的数据或者滤波的方式将磁异常探测仪采集的实际磁场数据去除已校准的地磁场值,获得校准磁干扰值;将所述校准磁干扰值代入所述机体磁干扰模型或所述卫通天线磁干扰模型,机体磁干扰模型矩阵和卫通天线磁干扰模型矩阵利用校准标准飞行采集的数据计算得到;利用最小二乘法计算获得待求系数矩阵。
10、进一步地,所述机体磁干扰模型中根据所述无人机姿态角计算获得磁力仪坐标系三轴与地磁场之间夹角的余弦值包括:
11、构造旋转矩阵a(i,d)1×3:a(i,d)1×3=[a1,a2,a3];a1=cosicosd,a2=cosisind,a3=sini;i和d分别表示地磁倾角和地磁偏角;
12、构造旋转矩阵b(α,β,γ)3×3:其中,
13、b11=cosβcosγ
14、b12=cosβsinγ
15、b13=-sinβ
16、b21=sinαsinβcosγ-cosαsinγ
17、b22=sinαsinβsinγ+cosαcosγ
18、b23=sinαcosβ
19、b31=cosαsinβcosγ+sinαsinγ
20、b32=cosαsinβsinγ-sinαcosγ
21、b33=cosαcosβ
22、式中,α,β,γ表示无人机姿态角;
23、则磁力仪坐标系三轴与地磁场之间夹角的余弦值cosx,cosy,cosz按如下公式计算:
24、[cosx,cosy,cosz]=a(i,d)b(α,β,γ)。
25、进一步地,所述机体磁干扰模型中根据所述余弦值计算获得机体磁干扰模型矩阵包括:令u1=cosx,u2=cosy,u3=cosz,则所述机体磁干扰模型矩阵表示为:
26、
27、进一步地,所述卫通天线磁干扰模型中根据所述无人机姿态角和所述卫通天线的角度监控数据分别计算方位机构运动对应的姿态角αm1,βm1,γm1、天线主面运动对应的姿态角αm2,βm2,γm2、馈源部分运动对应的姿态角αm3,βm3,γm3包括:
28、αm1=α,βm1=β,γm1=γ+θ1
29、αm2=α,βm2=β+θ2,γm2=γ+θ1
30、αm3=α+θ3,βm3=β+θ2,γm2=γ+θ1
31、式中,α,β,γ表示无人机姿态角;θ1,θ2,θ3分别表示卫通天线的航向角、俯仰角和极化角。
32、进一步地,所述卫通天线磁干扰模型中根据磁干扰hm1,hm2,hm3各自对应的姿态角分别计算获得三组磁力仪坐标系三轴与地磁场之间夹角的余弦值包括:
33、[cosxm1,cosym1,coszm1]=a(i,d)b(αm1,βm1·γm1)
34、[cosxm2,cosym2,coszm2]=a(i,d)b(αm2,βm2·γm2)
35、[cosxm3,cosym3,coszm3]=a(i,d)b(αm3,βm3·γm3)
36、其中,
37、b11mj=cosβmjcosγmj
38、b12mj=cosβmjsinγmj
39、b13mj=-sinβmj
40、b21mj=sinαmjsinβmjcosγmj-cosαmjsinγmj
41、b22mj=sinomjsinβmjsinγmj+cosαmjcosγmj
42、b23mj=sinαmjcosβmj
43、b31mj=cosαmjsinβmjcosγmj+sinαmjsinγmj
44、b32mj=cosαmjsinβmjsinγmj-sinαmjcosγmj
45、b33mj=cosαmjcosβmj。
46、根据本发明的另一方面,提出一种面向磁探测无人机卫通天线磁干扰的补偿系统,该系统包括:
47、数据获取模块,其配置成获取无人机姿态角;获取无人机携带的磁异常探测仪采集的磁场数据、卫通天线的角度监控数据;所述卫通天线的角度监控数据包括航向角、俯仰角和极化角;
48、磁干扰数据获取模块,其配置成根据所述无人机姿态角、磁场数据、卫通天线的角度监控数据,利用建立的磁干扰模型获得无人机机身产生的磁干扰和卫通天线产生的磁干扰;所述建立的磁干扰模型包括通过t-l模型构建的机体磁干扰模型和根据卫通天线的运动角度构建的卫通天线磁干扰模型;
49、补偿模块,其配置成将所述磁异常探测仪采集的磁场数据和计算获得的两个磁干扰数据作差,获得实际地磁场值,以实现实时的无人机航磁补偿。
50、本发明的有益技术效果是:
51、本发明提出了一种面向磁探测无人机卫通天线磁干扰的补偿方法及系统,用以对航磁补偿过程中由无人机平台中卫通天线运动引起的磁干扰进行补偿。根据无人机姿态角、磁场数据、卫通天线角度监控数据,利用建立的磁干扰模型获得无人机机身产生的磁干扰和卫通天线产生的磁干扰;将磁异常探测仪采集的磁场数据和计算获得的两个磁干扰数据作差,获得实际地磁场值,以实现实时的无人机航磁补偿。本发明提升了无人机航空磁探测系统的测量精度和数据质量,可用于搭载航空磁异常探测系统的无人机平台,实时对平台中卫通天线运动产生的磁干扰进行补偿。
- 还没有人留言评论。精彩留言会获得点赞!